Читайте также:
|
Понятно, что у нас нет желания, чтобы робот-охотник перемещался в темноте, теряя при этом драгоценную энергию. Поэтому мы добавим еще один слой поведения. Третьим слоем будет еще один пороговый детектор (см. рис. 8.24). Этот детектор отключает напряжение от цепей первого слоя, системы питания двигателя и цепей второго слоя при уровне освещенности, близком к темноте. При повышении среднего уровня освещенности система восстанавливает питание первого слоя, подает напряжение на двигатели и цепи второго слоя.
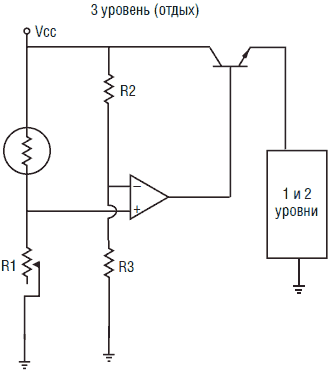
Рис. 8.24. Схема компаратора для поведения типа «отдых»
Дата добавления: 2015-08-17; просмотров: 65 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Дополнительный тип поведения (питание) | | | Соревнования ВЕАМ-роботов |