Читайте также:
|
В теории управления алгоритмом принято называть совокупность преобразований логических условий, действующих в определённом порядке. Применительно к заданной силовой схеме (рис.1) таким алгоритмом является таблица замыкания контакторов с указанием величины параметров, которые изменяются в процессе управления (табл. 1).
Таблица 1 - Алгоритм управления электропоездом
| Положение гл. рукоятки | Позиция | Контакторы | Параметры | ||||||||||||||||
| линейные | реостатные | мостовой | переходные | Ослабление возбуждения | |||||||||||||||
| лк1-2 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | М | П 1-2 | Ш 1-2 | 11, 12 | m | β | R, Ом | ||
| + | + | + | + | 1,0 | 16,68 | ||||||||||||||
| + | + | + | + | + | 1,0 | 12,03 | |||||||||||||
| + | + | + | + | + | + | 1,0 | 8,66 | ||||||||||||
| + | + | + | + | + | + | + | 1,0 | 7,06 | |||||||||||
| + | + | + | + | + | + | + | 1,0 | 5,46 | |||||||||||
| + | + | + | + | + | + | + | 1,0 | 4,01 | |||||||||||
| + | + | + | + | + | + | + | 1,0 | 2,56 | |||||||||||
| + | + | + | + | + | + | + | 1,0 | 1,28 | |||||||||||
| + | + | + | + | + | + | + | 1,0 | ||||||||||||
| + | + | + | + | + | 0,67 | ||||||||||||||
| + | + | + | + | + | + | 0,5 | |||||||||||||
| + | + | + | + | + | 1,0 | 8,34 | |||||||||||||
| + | + | + | + | + | + | 1,0 | 4,69 | ||||||||||||
| + | + | + | + | + | + | + | + | 1,0 | 2,96 | ||||||||||
| + | + | + | + | + | + | + | + | 1,0 | 1,38 | ||||||||||
| + | + | + | + | + | + | + | + | 1,0 | |||||||||||
| + | + | + | + | + | + | + | 0,67 | ||||||||||||
| + | + | + | + | + | + | + | + | 0,5 |
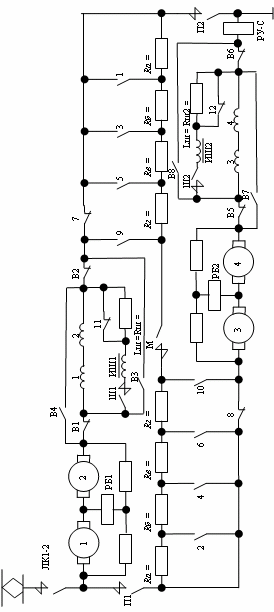

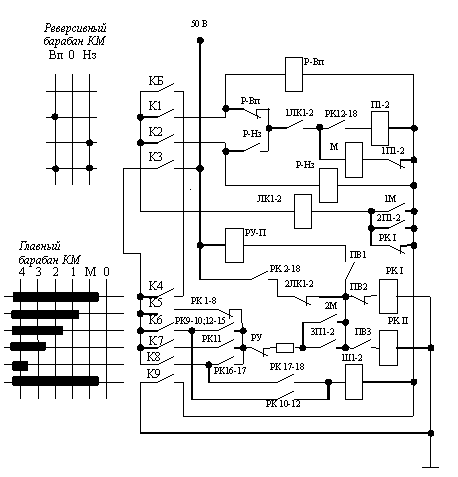
Рисунок 2 - Упрощенная принципиальная схема цепей управления
Дата добавления: 2015-08-10; просмотров: 100 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Введение | | | Расчет номинального тока двигателя |