Читайте также:
|
У скреперов с загрузкой движущим усилием рабочим органом является ковш. Скрепер состоит из одноосного тягача 12 и собственно скрепера, соединенных седельно-сцепным устройством 11.
Ковш скрепера 4 имеет боковые стенки из стальных листов, усиленных штампованными накладками. В передней части к выступающим боковым стенкам ковша приварены проушины для шарнирного крепления штоков двух гидроцилиндров подъема ковша 9. Днище ковша снизу усилено накладками. К его передней части приварены подножевые плиты, на которых укреплены ножи 1 прямой, ступенчатой или полукруглой формы, средний нож выдвинут вперед для облегчения резания грунта.
Задняя стенка 7 состоит из щита и толкателя, предназначенного для присоединения штоков гидроцилиндров выдвижения задней стенки. Снизу стенка поддерживается двумя опорными роликами, перекатывающимися по днищу ковша. Принудительная выгрузка грунта, производимая выдвижением задней стенки гидроцилиндрами 3, допускает работу скрепера в грунтах с повышенной влажностью и вязкостью.
Заслонка 8 при помощи рычагов шарнирно прикрепляется к боковым стенкам ковша. К средней части рычагов приварены кронштейны для присоединения штоков гидроцилиндров 5 заслонки. Буфер 6 предназначен для работы с трактором – толкачом.
Тяговая рама скрепера 2 представляет собой П-образную раму, к средней части которой приварен хобот 10 коробчатого сечения. Хобот спереди оканчивается литой головкой с проушинами для соединения скрепера с тягачом.
Конструкция сцепного устройства обеспечивает свободные взаимные повороты скрепера и тягача на кривых, уклонах и неровностях местности. Соединение с тягачом может осуществляться через тележку 13.
У тяжелых самоходных скреперов установлен второй дополнительный двигатель для привода задних колес через гидромеханическую трансмиссию, что позволяет выполнить все колеса машины ведущими. Управление дополнительным двигателем и гидромеханической трансмиссией синхронизировано с управлением тягачом и ведется из кабины машиниста. Одновременную работу обоих двигателей используют при заполнении ковша и транспортировании грунта к месту разгрузки; при выгрузке ковша и обратном ходе используется один двигатель тягача. У таких машин полный вес конструкции и грунта используется в качестве активного сцепного веса, что повышает проходимость агрегата.

Рис. 2.2. Конструкция скреперов: а – самоходный скрепер; б … д – схемы соединения с тягачом; е – скрепер с принудительной загрузкой ковша скребковым элеватором
Рабочий цикл скрепера состоит из следующих последовательно выполняемых операций: резание грунта и наполнение ковша, транспортирование грунта в ковше к месту укладки, выгрузка и укладка грунта, обратный (холостой) ход машины в забой. При наборе грунта (рис. 2.3, а) ножи опущенного на грунт ковша 2 срезают слой грунта толщиной h, который поступает в ковш противодавлением находящегося перед ножами несрезанного слоя грунта при поднятой подвижной заслонке 3. Наполненный грунтом ковш на ходу поднимается в транспортное положение (рис. 2.3, б), а заслонкаопускается, препятствуя высыпанию грунта из ковша. При разгрузке ковша (рис. 2.3, в), заслонка поднята, а грунт вытесняется принудительно из приспущенного ковша выдвигаемой вперед задней стенкой 5, причем регулируемый зазор между режущей кромкой ковша и поверхностью земли определяет толщину с укладываемого грунта 4, который разравнивается (планируется) ножами ковша и частично уплотняется колесами скрепера. При холостом ходе порожний ковш поднят в транспортное положение, а заслонка опущена. Для увеличения тягового усилия скрепера при наполнении ковша в плотных грунтах обычно используют бульдозер-толкач 1 (см. рис. 2.3, а). При наполнении ковша скорость движения скреперов составляет 2…4 км/ч, при транспортном передвижении – 0,5…0,8 максимальной скорости трактора или тягача.
Увеличению производительности скреперов способствует объединение их для работы в сцепы по 2…3 машины (рис. 2.4), управляемые одним водителем.
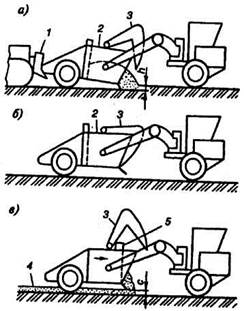
Рис. 2.3. Операции рабочего цикла самоходного скрепера
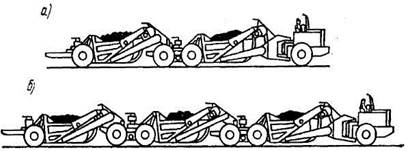
Рис. 2.4. Скреперные поезда: а – двухковшовый; б – трехковшовый
Автоматизация планировочных работ
С целью облегчения труда машинистов, отечественная промышленность выпускает автоматизированные системы управления рабочим процессом скреперов «Стабилоплан-10» и «Копир-Стабилоплан-10».
Аппаратура «Стабилоплан-10» предназначена для автоматического и дистанционного управления положением режущей кромки ковша скрепера по высоте. В состав аппаратуры «Стабилоплан-10» (рис. 2.5) входят: датчик углового положения ДКБ 1, пульт управления 2, блок управления 3, исполнительное устройство – гидрозолотник 4. Питание осуществляется от аккумулятора 5.
Рис. 2.5. Установка аппаратуры системы «Стабилоплан-10»
Функциональная и электрическая схемы системы «Стабилоплан-10» идентичны функциональной и электрической схемам системы «Автоплан-10».

Рис. 2.6. Установка аппаратуры системы «Копир-Стабилоплан-10»: 1 – датчик частоты вращения ТГ; 2 – исполнительные механизмы (электрозолотники); 3 – блок перегрузки двигателя; 4 – пульт управления; 5 – механизм перемещения; 6 – фотоприемное устройство; 7 – датчик управления задней стенкой КВД; 8 – датчик углового положения ДКБ; 9 – лазерный излучатель; 10 – аккумулятор питания лазерного излучателя
Анализ эксплуатации прицепных скреперов на планировочных работах показал, что при планировке земляной поверхности под заданную отметку, скреперист должен управлять высотным положением ковша, перемещением задней стенки при подсыпке и загрузке, выглублением ковша при перегрузке двигателя тягача. С целью автоматизации процессов всех этих работ создана система автоматического управления скреперами «Копир-Стабилоплан-10» (рис. 2.6). Автоматическая стабилизация положения режущей кромки ковша скрепера обеспечивается либо автономной системой управления, чувствительным элементом которой является датчик углового положения ДКБ, либо копирной системой, в которой в качестве опорной (задающей) плоскости используется луч лазера, а в качестве чувствительного элемента – фотоприемное устройство (ФПУ).
В этом случае датчик углового положения ДКБ устанавливается на буфере ковша скрепера и преобразует угловое перемещение корпуса датчика относительно вертикали в электрический сигнал.
Одновременно с процессом стабилизации режущей кромки обеспечивается защита двигателя от перегрузки; чувствительным элементом системы защиты является датчик частоты вращения ТГ.
Автоматическая подсыпка осуществляется принудительно выталкиванием грунта задней стенкой при передвижении скрепера под уклон и на выемках. Датчики управления задней стенкой КВД устанавливаются на ковше скрепера и представляют собой бесконтактные выключатели.
Фотоприемное устройство ФПУ устанавливается на ковше скрепера и представляет собой прибор, контролирующий положение режущей кромки ковша скрепера относительно лазерной направляющей.
Пульты управления и блок защиты двигателя от перегрузок устанавливаются в кабине трактора и служат для дистанционного управления и преобразования сигналов датчиков ДКБ, ФПУ, ТГ и КВД в команды управления электромагнитами золотников. Гидрозолотники с электрическим управлением устанавливаются на тракторе и служат для управления гидроцилиндром ковша скрепера при работе в автоматическом режиме.
Установка глубины резания производится дистанционно из кабины трактора задатчиком, расположенным на пульте управления.
Система «Копир-Стабилоплан-10» - автономно-копирная, состоит из двух частей: автономной (бортовой) аппаратуры автоматики и копирно-лазерного устройства.
Автономная система включает в себя системы угловой стабилизации ковша скрепера и выглубления ковша при перегрузках двигателя трактора-тягача (эти системы аналогичны системам угловой стабилизации и выглубления отвала бульдозера) и систему управления выгрузкой грунта из ковша задней стенкой.
Копирно-лазерное устройство и его работа подробно описаны в /1/.
Дата добавления: 2015-07-20; просмотров: 82 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Классификация | | | Схемы движения скреперов |