Читайте также:
|
Построение диаграммы ускорения точки С осуществляется методом графического дифференцирования диаграммы скорости. Для этого проводится новая система координат (рисунок 1.19, в). Выбирается полюс графического дифференцирования Р2 на расстоянии Н2 от начала координат (Н2 = 15 мм).
На диаграмме скорости (рисунок 1.19, б) соединяются хордами точки пересечения диаграммы скорости с отметками времени на каждом участке. Из точки Р2 проводятся линии параллельные хордам.
По аналогии отрезок  - среднее ускорение на первом участке, отрезок
- среднее ускорение на первом участке, отрезок  - среднее ускорение на втором участке и так далее. Соединяя точки 1'', 2'', 3'', 4'', 5'', 6'' плавной линией, получаем диаграмму ускорения точки С
- среднее ускорение на втором участке и так далее. Соединяя точки 1'', 2'', 3'', 4'', 5'', 6'' плавной линией, получаем диаграмму ускорения точки С  .
.
Масштабный коэффициент диаграммы ускорения:
 . (1.10)
. (1.10)
Истинные значения перемещения скорости и ускорения пятого звена, например, для III положения механизма
 ;
;
 ;
;

Графоаналитический метод
Для плоских механизмов, в частности рычажных, кинематический анализ удобно выполнять методом планов скоростей и ускорений. План скоростей (или ускорений) - это векторная картина скоростей (ускорений) характерных точек механизма для данного его положения. Метод планов имеет два существенных преимущества: во-первых, не нужно выполнять операции дифференцирования, уравнения для искомых величин получают непосредственно на основе теорем механики; во-вторых, можно очень наглядно интегрировать решение в графическом виде.
Метод планов основан на следующих теоремах теоретической механики.
Теорема 1. При плоском движении твердого тела его мгновенное абсолютное перемещение можно представить (рисунок 1.20) как сумму переносного поступательного перемещения вместе с любой точкой А этого тела и относительного вращения вокруг оси, проходящей через ту же точку А. (Именно так можно рассматривать перемещение тела на плоскости из положения АоВо через промежуточное положение АВ’ в положение АВ).
Теорема 2. Абсолютная скорость υа движущейся точки в каждый момент времени равна векторной сумме переносной υе и относительной υr скоростей:
 . (1.11)
. (1.11)
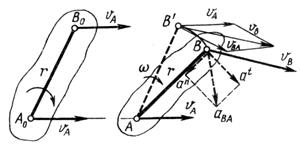
Рисунок 1.20
Теорема 3 (Кориолиса). Абсолютное ускорение аа в сложном движении равно геометрической сумме переносного ае, относительно аr и кориолисова аk ускорений:
 (1.12)
(1.12)
Направление Кориолисова ускорения – вектор направления скорости  относительно тела к, необходимо повернуть на 90о по направлению к угловой скорости.
относительно тела к, необходимо повернуть на 90о по направлению к угловой скорости.
 ,
,  , (1.13)
, (1.13)
где ωе – угловая скорость переносного движения; υr – относительная линейная скорость; произведение ωе и υr - векторное.
Объединяя утверждения теорем 1 и 2, для абсолютной скорости любой точки В можно записать следующее векторное равенство:
 , (1.14)
, (1.14)
где υА – скорость любой точки А рассматриваемого твердого тела; υВА - относительная скорость точки В в ее мгновенном вращении вокруг точки А; линия действия этой скорости перпендикулярна радиусу ВА.
Графическое изображение скоростей в масштабе, называют планом скоростей. Точка Рv является началом отсчета, и ее часто называют полюсом плана скоростей.
Если переносное движение – поступательное (ωе = 0), то ускорение Кориолиса аk = 0. Относительное движение по теореме 1 - вращение точки В вокруг точки А. Поэтому относительное ускорение аr, в свою очередь состоит из двух ускорений: нормального аn = ω2r, направленного вдоль линии ВА к центру вращения, и касательного аt, направленного перпендикулярно ВА (рисунок 1.21, аr = aВА). Таким образом, выражение (1.13) получит вид:
 (1.15)
(1.15)
Рассмотрим векторный метод планов скоростей и ускорений на примере четырехшарнирного механизма (рисунок 1.21, а).
План скоростей. Абсолютная скорость точки А  (l 1 – длина звена ОА); вектор υА перпендикулярен ОА и направлен по угловой скорости ω1. Для определения абсолютной скорости точки В в соответствии с теоремой 1 рассмотрим движение звена АВ как сумму поступательного переносного движения вместе с полюсом –
(l 1 – длина звена ОА); вектор υА перпендикулярен ОА и направлен по угловой скорости ω1. Для определения абсолютной скорости точки В в соответствии с теоремой 1 рассмотрим движение звена АВ как сумму поступательного переносного движения вместе с полюсом –
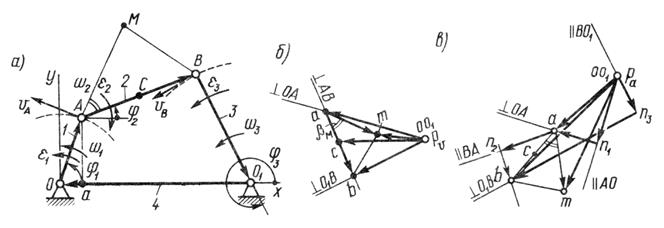

точкой А и относительного вращения вокруг полюса А. Векторное уравнение (8) определяет абсолютную скорость точки В; здесь линия действия вектора  перпендикулярна звену О1А, а вектора
перпендикулярна звену О1А, а вектора  - звену АВ (в уравнении (1.14) векторы, известны по модулю и направлению, подчеркнуты дважды, а векторы, у которых известна только линия действия, - один раз). При графическом решении уравнения (1.14) на чертеже выбирают начало отсчета – точку р υ
- звену АВ (в уравнении (1.14) векторы, известны по модулю и направлению, подчеркнуты дважды, а векторы, у которых известна только линия действия, - один раз). При графическом решении уравнения (1.14) на чертеже выбирают начало отсчета – точку р υ
(рисунок 1.21, б), откладывают от нее в направлении скорости υА отрезок рυa. Длину отрезка рυa выбирают из условия удобства дальнейших построений: отрезок рυa определяет масштабный коэффициент плана скоростей: 
который показывает, что каждый миллиметр чертежа изображает μυ единиц скорости; единица масштабного коэффициента – (м/с)/мм.
Продолжая графическое решение уравнения (1.14), из точки а плана (рисунок 1.21, б), которая изображает конец вектора υА, проводим линию действия вектора υВА перпендикулярную АВ, а через начальную точку р υ – линию действия вектора υВ перпендикулярного О1В. Точка b пересечения этих линий определяет отрезок р υ b, изображающий вектор υВ. Отрезок ab изображает вектор υВА; согласно уравнению (1.14) направление этого вектора – от точки а к точке b. Векторный треугольник р υ ab - графическое решение исходного уравнения; модули найденных векторов скоростей:

Угловые скорости звеньев 2 и 3 в их движении относительно точек А и О1:

где l 2 = АВ, l 3 = ВО1 – длины соответствующих звеньев. Для определения направления угловых скоростей ω2 и ω3 векторы  и
и  переносим мысленно с плана скоростей на план механизма в точку В и видим, что звено 2 вращается относительно точки А по часовой стрелке, а звено 3 относительно точки О1 – против часовой стрелки (рисунок 1.21, а).
переносим мысленно с плана скоростей на план механизма в точку В и видим, что звено 2 вращается относительно точки А по часовой стрелке, а звено 3 относительно точки О1 – против часовой стрелки (рисунок 1.21, а).
Определив скорость точки В, скорости точек С и М (или любых других в данном положении механизма) находят без составления уравнений и их решения; для этого используются следующие свойства планов скоростей и ускорений:
1. Векторы, идущие из точки р υ плана скоростей (ускорений), представляют собой в масштабе μυ абсолютные скорости (ускорения) соответствующих точек механизма; векторы, не проходящие через полюс, есть относительные скорости (ускорения) точек звеньев. Концы векторов абсолютных скоростей (ускорений) точек А, В, … принято обозначать соответствующими малыми буквами а, b, ….
2. Отображения точек закрепленных шарниров О, О1 всегда совпадают с начальной точкой р υ.
3. Отрезки оа, ab, o1b на плане отображают звенья АО, АВ и О1В механизма. Это означает, что если, например, на звене АВ
(рисунок 1.21, а) имеется точка С, лежащая на прямой АВ, то соответствующая отображающая точка с на плане (рисунок 1.21, б) находится на прямой ab и при этом верно соотношение ab/ac=l2/АС, что вытекает из уравнений 
 тогда вектор абсолютной скорости точки с звена 2
тогда вектор абсолютной скорости точки с звена 2
4. Любые три точки А, В, М звена, составляющие треугольник, отображаются на плане в треугольник Δabm подобный ΔАВМ; на отрезке ab можно построить два треугольника, подобных данному; из них искомое решение дает тот, у которого порядок обхода вершин из точки а такой же, как в ΔАМВ (направление обхода вершин на звене и на плане должно быть одинаковым). Таким образом, на рисунке 1.21, б получено отображение на плане точки М – точки m:


При тщательном выполнении построений, средняя ошибка определения скоростей составляет 5…7%, ускорений – до 10%.
План ускорений. Исходными данными для построения плана ускорений механизма (рисунок 1.21, а) являются известные абсолютные ускорения точки А звена 1 и найденные скорости. Ускорение точки А при  равно векторной сумме нормального ускорения
равно векторной сумме нормального ускорения  , направленного от точки А к точке О, и касательного
, направленного от точки А к точке О, и касательного 
 .
.
Выбрав начало отсчета р υ плана ускорений (рисунок 1.21, в), показывают на чертеже отображения ускорений  и
и  векторы
векторы  и
и  ; вектор
; вектор  плана изображает полное ускорение а А. Масштабный коэффициент плана ускорений [(м/с2)/мм]:
плана изображает полное ускорение а А. Масштабный коэффициент плана ускорений [(м/с2)/мм]:

Для определения ускорения точки В рассмотрим абсолютное движение звена АВ как сумму переносного и относительного движений. С учетом выражения (1.15) векторной уравнение абсолютного ускорения точки В получит вид:
 . (1.16)
. (1.16)
Вектор нормального ускорения  по модулю равен
по модулю равен  и как центростремительный направлен по прямой АВ от точки В к центр относительного вращения – точке А. Вектор касательного ускорения
и как центростремительный направлен по прямой АВ от точки В к центр относительного вращения – точке А. Вектор касательного ускорения  перпендикулярен прямой АВ. В уравнении (1.16) двумя чертами подчеркнуты ускорения, известные по модулю и направлению, а одной чертой – когда известна лишь линия действия. Так как ни модуль, ни линия действия вектора aB неизвестны, а у вектора известна только линия действия, то векторное ускорение (1.16) решить нельзя; поэтому необходимо иметь второе векторное уравнение.
перпендикулярен прямой АВ. В уравнении (1.16) двумя чертами подчеркнуты ускорения, известные по модулю и направлению, а одной чертой – когда известна лишь линия действия. Так как ни модуль, ни линия действия вектора aB неизвестны, а у вектора известна только линия действия, то векторное ускорение (1.16) решить нельзя; поэтому необходимо иметь второе векторное уравнение.
Точка В принадлежит одновременно звеньями АВ и ВО1 (рисунок 1.21, а). Рассматривая движение звена ВО1 и принимая за полюс неподвижную точку О1, запишем следующее уравнение для абсолютного ускорения точки В:
 , (1.17)
, (1.17)
где вектор  параллелен ВО1; линия действия вектора
параллелен ВО1; линия действия вектора 
Совместное решение векторных уравнений (1.16) и (1.17) дает возможность определить искомый вектор абсолютного ускорения точки В. Отрезок  представляет собой первое слагаемое векторного уравнения (1.16) - ускорение аА. От точки а откладывают отрезок
представляет собой первое слагаемое векторного уравнения (1.16) - ускорение аА. От точки а откладывают отрезок  , изображающий вектор
, изображающий вектор  , который направлен параллельно звену ВА от точки В к точке А (так как звено 2 вращается относительно точки А, а вектор - центростремительное ускорение). Далее через конец отрезка an2 проводят линию действия
, который направлен параллельно звену ВА от точки В к точке А (так как звено 2 вращается относительно точки А, а вектор - центростремительное ускорение). Далее через конец отрезка an2 проводят линию действия  .
.
Аналогично, графически реализуется уравнение (1.17). На пересечении линий действия векторов и  находится искомая точка b; отрезок
находится искомая точка b; отрезок  изображает вектор аВ; отрезки
изображает вектор аВ; отрезки  и
и  изображают соответственно векторы и . Полученный план ускорений и система уравнений (1.16) и (1.17) взаимно однозначно соответствуют друг другу, т.е. найденное графическое решение удовлетворяет исходным уравнениям. Стрелки векторов на плане ускорений поставлены в соответствии с векторными уравнениями.
изображают соответственно векторы и . Полученный план ускорений и система уравнений (1.16) и (1.17) взаимно однозначно соответствуют друг другу, т.е. найденное графическое решение удовлетворяет исходным уравнениям. Стрелки векторов на плане ускорений поставлены в соответствии с векторными уравнениями.
Если на звене имеется дополнительная точка, например, на звене 2 точка С, то ее отображение с на плане ускорений (рисунок 1.21, в) находится на отрезке ab с учетом соблюдения условия  .
.
Отображение m точки М строится на основании четвертого свойства планов:  подобен
подобен  ;
;  .
.
Угловые ускорения звеньев в их относительном вращательном движении можно найти, используя соответствующие касательные ускорения:  ;
;  .
.
Для определения направления углового ускорения ε2 звена АВ переносим вектор в точку В (рисунок 1.21, а) на плане механизма и видим, что вектор поворачивает звено вокруг точки а по часовой стрелке. Сопоставляя направления ω2 и ε2, заключаем, что звено 2 движется относительно точки А ускоренно. Аналогично определяем направление ускорения ε3 звена О1В.
Дата добавления: 2015-07-11; просмотров: 169 | Нарушение авторских прав