Читайте также:
|
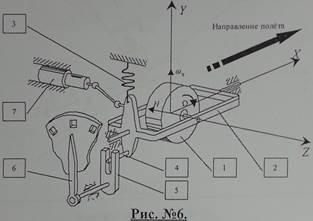
В авиации широкое применение получил двухстепенный гироскопический измеритель угловой скорости разворота (виража) самолета в горизонтальной плоскости, называемый указателем поворота (УП).
Принципиальная кинематическая схема УП (рис. 6) аналогична схеме ДУС (рис. 2). Отличие заключается, в основном, лишь в узле съема показаний - в УП показания осуществляются визуально по шкале. При развороте самолета в горизонтальной плоскости с угловой скоростью соп ротор 1, в соответствии со свойствами двухстепенного гироскопа, будет поворачиваться вместе с рамкой 2 вокруг оси ОХ в направлении совмещения по кратчайшему пути вектора кинетического момента Я с вектором угловой скорости разворота со,,. При этом палец 4 будет поворачивать вилку 5, а вместе с ней и стрелку 6 по шкале. Когда противодействующий момент от пружины уравновесит гироскопический момент, стрелка прибора установится в определенном положении, отклонившись на угол, качественно характеризующий значение угловой скорости разворота соп. Колебания подвижной системы будут затухать за счет рассеяния энергии в пневматическом демпфере 7. Шкала указателей поворота, как правило, не имеет оцифрованных делений. На ней обычно наносят три деления - среднее (нулевое) и два крайних, соответствующих максимальному отклонению стрелки. Это объясняется тем, что прибор принципиально не может точно измерять угловую скорость самолета, а лишь указывает направление разворота: "вправо", "влево" и качественно характеризует его угловую скорость "больше", "меньше. Сказанное выше можно пояснить следующим образом.
Как известно, чтобы избежать скольжения, летчики обычно совершают так называемый правильный вираж. Главным условием правильного виража является накренение самолета на такой угол крена у, при котором его нормальная ось (ось ОУс) совпадает с направлением кажущейся вертикали. При вираже самолета (см. рис.7) с угловой скоростью соп угол отклонения рамки указателя поворота может быть определен из условия равенства гироскопического момента моменту пружины (переходным процессом подвижной системы пренебрегаем), т.е.
кЛт = Н(0п c°s(r ~ Р)
LI
откуда при малом щ =— соп cos у (5).
я
Дата добавления: 2015-07-10; просмотров: 61 | Нарушение авторских прав