|
Читайте также: |
КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ ПЛОСКИХ КУЛАЧКОВЫХ МЕХАНИЗМОВ
Определение перемещения ведомого звена
Тип кулачкового механизма______________________
| Номер замера | ||||||||||||||
| Угол поворота кулачка, φо | ||||||||||||||
| Перемещение ведомого звена, S, мм (метод положений) | ||||||||||||||
| То же So, мм (метод обращенного движения) | ||||||||||||||
| Средние величины перемещения Sc | ||||||||||||||
| Приращение перемещений ΔSC, мм | ||||||||||||||
| Аналоги скорости ведомого звена, Vφ. мм | ||||||||||||||
| Фазовые углы | ||||||||||||||
| Номер замера | ||||||||||||||
| φо | ||||||||||||||
| S | ||||||||||||||
| So | ||||||||||||||
| Sc | ||||||||||||||
| ΔSC | ||||||||||||||
| Vφ | ||||||||||||||
| Фазовые углы |
Определить фазовые углы φy =; φдс =; φп =
Средние величины перемещений вычислять по формуле
Sc = 0.5(S+S0)
Приращения перемещений определять по формуле
ΔSci =Sci – Sc(i-1)
где i- номер замера, i = 1, 2, 3...
Аналоги средних скоростей на участках Δφ вычислять по формуле
MM
где Δφ - приращение угла поворота кулачка, рад.
В нижней строке таблицы указать фазовые углы φу, φдс, φп, выделив их зоны.
При построении графика Vφ = Vφ (φ) ординаты Vφi строить из середины участков Δφ.
Графики Sc = Sc (φ), Vφ = Vφ (φ)
S, Vφ
| t | ||||||
φ
Схема построения кулачкового механизма
Контрольные вопросы
1. Кулачковые механизмы. Их преимущества и недостатки.
2. Рассказать об основных параметрах кулачкового механизма:
ходе ведомого звена, фазовых углах, профильных углах, минимальном радиусе, смещении.
3. Рассказать о рабочем процессе кулачкового механизма.
4. Каковы экспериментальные методы определения перемещения ведомого звена?
5. Аналог скорости. Как определить скорость по известному
аналогу?
Работу принял____________________
 15
15
Лабораторная работа №5
СТАТИЧЕСКОЕ УРАВНОВЕШИВАНИЕ ВРАЩАЮЩИХСЯ МАСС
Заданные величины
| Массы дебаланси-рующих грузов, г | Радиусы центров масс дебаланс. грузов, мм | Углы, определяющие положения радиусов | ||||||
| M1 | М2 | М3 | R1 | R2 | R3 | α1 | α2 | α3 |
Вычисленные параметры
| Статические моменты масс, г-мм | Принятая масса противовеса тn | Радиус противовеса rn | Угол радиуса противовеса αn | |||
| M1 | М2 | М3 | Mn | |||
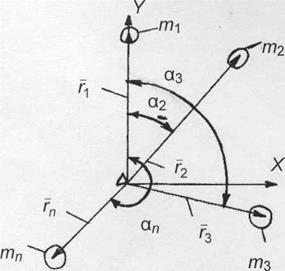 Расчёт параметров противовеса
Расчёт параметров противовеса

Рис. К расчету параметров противовеса
А = M1+ М2 cos α2 + M3 cos α3 =
В = М2 sin α2 + М3 sin α3 =

Массой противовеса тn задаются:

Схема расположения масс
Контрольные вопросы
1. Уравновешивание (балансировка) и его задачи.
2. Как вычисляется сила инерции и момент сил инерции?
3. Причины возникновения сил инерции и момента сил инерции
у вращающихся тел.
4. В чём заключается статическое уравновешивание.
5. Методы статического уравновешивания.
6. Последовательность статического уравновешивания экспериментальным методом.
7. Последовательность статического уравновешивания расчётным методом.
8. Какие детали достаточно уравновешивать только статически?
Работу принял________________
______________________________
Лабораторная работа № 6
МОМЕНТНОЕ УРАВНОВЕШИВАНИЕ ВРАЩАЮЩИХСЯ ТЕЛ
Схема балансировочного станка конструкции Б. В. Шитикова

Параметры дополнительного груза
Масса mд = Радиус rд =
г.
мм.
Величины амплитуд неуравновешенного ротора
| Замеры амплитуд | ||||||
| Аi | Ас | |||||
| A1 | ||||||
| А2 | ||||||
| А3 |
Ас-средняя величина амплитуд A1, A2,A3; 
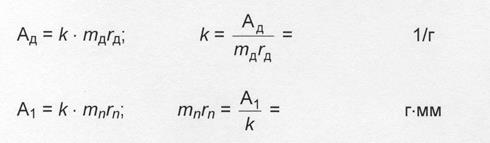
Расчет амплитуды дополнительного груза Ад

Расчет угла установки коррктирующей массы груза

Определение коэффициента пропорциональности
Параметры противовеса и величины остаточной амплитуды
| Масса противовеса тn, г | Радиус установки противовеса rn, мм | Остаточные амплитуды Ао при различных углах установки противовеса | |||
| + αn= | - αn= | 180 - αn= | 180 + αn = | ||
Расчет остаточного статического момента m0r0 дебалансирующего ротора

Графический метод определения корректирующей массы тn, радиуса и угла установки противовеса
Контрольные вопросы
1. Причина появления момента сил инерции в роторах.
2. В чём заключается моментная балансировка? Её отличие от
балансировки статической.
3. Конструкция балансировочного станка Б.В. Шитикова.
4. На каком принципе основана работа станка Б.В. Шитикова?
5. Порядок проведения моментной балансировки.
6. Что такое коэффициент пропорциональности /с? Как он определяется?
7. Как рассчитываются параметры противовеса, каково их минимальное число?
8. Методы расчёта корректирующих масс для балансировки вращающихся тел.
Работу принял__________________
 21
21
Лицензия ЛР № 020370 Составитель Е.В. Поезжаева
Подписано в печать 27.09.2004.
Формат 60x90/16. Объем 1,5 п.л.
Тираж 100. Заказ 120.
 Редакционно-издательский отдел Пермского государственного технического университета
Редакционно-издательский отдел Пермского государственного технического университета
Дата добавления: 2015-07-12; просмотров: 95 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ИНСТРУКЦИЯ по технике безопасности | | | Курск-2010 |