Читайте также:
|
Типичная однопильная раскряжевочная установка работает следующим образом: хлыст движется по подающему транспортеру 4, который приводится в движение от электродвигателя 6, торец хлыста попадает на стол с упорами отмера длин 5, срабатывают конечные выключатели, транспортер останавливается. Происходит опускание прижима 2, вместе с ним, но с меньшей скоростью опускается пильный аппарат 1, происходит раскряжевка. Пильный аппарат с прижимом возвращаются в исходное положение и сбрасыватель сортиментов 3 сталкивает сортимент с транспортера, после чего запускается транспортер и цикл повторяется. Приводы осуществляются гидроцилиндрами 7, которые управляются золотниками 8 с электромагнитами YA1... YA6. Структурная схема однопильной раскряжевочной установки показана на рис. 1, а.
Ритм работы установки переменный (различное время на выдвижение хлыста, его пиление и т. д.), поэтому выбирают путевую схему управления, для чего в характерных точках траекторий рабочих органов (пилы, прижима, сбрасывателя, системы отмера длин) устанавливаются датчики положения (например конечные выключатели с самовозвратом SQ1...SQ5).
Работа установки в автоматическом режиме должна обеспечивать:
– включение подающего транспортера кнопкой «пуск» SB1;
– выключение подающего транспортера и включение прижима и пилы для движения вниз – SQ5;
– выключение движения вниз и включение движения вверх пилы и прижима – SQ2;
– выключение движения пилы и прижима вверх и включения сбрасывателя – SQ1;
– включение сбрасывателя на сброску – SQ1;
– возврат сбрасывателя в исходное положение – SQ3;
– «стоп» SQ4.
Таким образом, имеем:
выходные сигналы:
– включение подающего транспортера – кнопка «пуск» SB1;
– сигнал SQ1 фиксирует верхнее положение пилы и прижима;
– сигнал SQ2 фиксирует нижнее положение пилы и прижима;
– сигнал SQ3 фиксирует верхнее положение сбрасывателя (сортимент сброшен);
– сигнал SQ4 фиксирует сбрасыватель в исходном состоянии;
– сигнал SQ5 фиксирует касание хлыста упора (хлыст выдвинулся на заданную длину).
выходные сигналы:
– Y1 – сигнал поднятия упора и подача хлыста;
– Y2 – сигнал надвигания пилы и опускание прижима;
– Y 3 – сигнал подъема пилы и прижима;
– Y 4 – сигнал подъема сбрасывателя;
– Y 5 – сигнал опускания сбрасывателя;
– Y6 – промежуточный сигнал для устранения ложных срабатываний.
По полученным входным и выходным сигналам составляется циклограмма работы раскряжевочной установки (рис. 1, б).
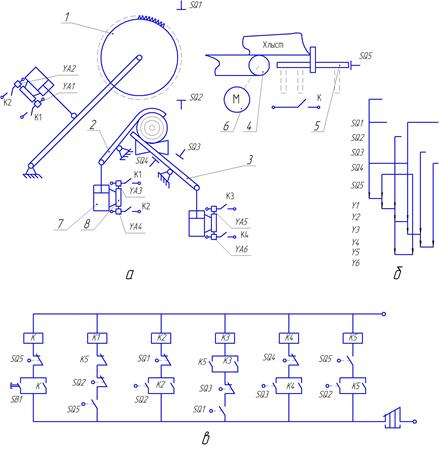
Рис.1. Однопильная раскряжевочная установка: а – структурная схема; б – циклограмма работы установки; в – схема управления установки.
Регулирование скорости надвигания пильного аппарата. Размеры хлыстов различны, следовательно, возникает необходимость регулировании скорости надвигания пильного аппарата. Наиболее простым и эффективным является способ дроссельного регулирования. Регулируя расход жидкости, подаваемой в гидроцилиндр надвигания пилы (рис. 2, а) дросселем 1, увеличивают или уменьшают скорость штока гидроцилиндра 2, а следовательно, и пильного аппарата.
На рис. 2, а показана механическая связь 4 между прижимом 3 пилы и дросселем 1. Здесь прижим является датчиком диаметров распиливаемой части хлыста или бревна. С увеличением диаметра он воздействует на дроссельную иглу 6 (рис. 2, б) она, перемещаясь вниз, уменьшает проходное отверстие 5. Так, скорость надвигания при распиловке хлыстов диаметром 10 см составляет 1,1 м/с, а при распиловке хлыстов диаметров 60 см – 0,1 м/с.

Рис.1. Регулирование скорости надвигания: а – схема механической связи между прижимом пилы и дросселем; б – схема дросселя; 1 – дроссель; 2 – гидроцилиндр; 3 – прижим пилы; 4 – механическая связь; 5 – проходное отверстие; 6 – дроссельная игла.
Дата добавления: 2015-07-12; просмотров: 73 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Гидроразгружатель | | | Система автоматического учета и управления сортировкой круглых лесоматериалов |