Читайте также:
|
3. Расчет мощности и выбор генератора и приводного двигателя системы «генератор-двигатель»
3.1 Расчет мощности и выбор генератора
Номинальная мощность генератора
Pн1=Pнр/  н =9,2/0,8=11,5,кВт
н =9,2/0,8=11,5,кВт
где:
Рнр - номинальная расчетная мощность рулевого двигателя; 
 н - номинальный КПД рулевого двигателя.
н - номинальный КПД рулевого двигателя.
Генератор выбирал из приложения с учетом номинального напряжения выбранного рулевого двигателя.
Тип электродвигателя П51М P=12,5 кВт;I=59 A;  =88 % n=2850 об/мин
=88 % n=2850 об/мин
3.2 Расчет мощности и выбор приводного двигателя
Номинальная мощность приводного двигателя
Рн2 = Рнр./ н* н1=9,2/0,8*0,88=13кВт.
где  н1 - номинальный КПД выбранного генератора.
н1 - номинальный КПД выбранного генератора.
В качестве приводного двигателя выбрал асинхронный двигатель с короткозамкнутым ротором из приложения с учетом номинальной частоты вращения выбранного генератора и напряжения судовой сети.
Марка двигателя А02-52-2М; P=13кВт;I=25 A;n=2900 об/мин =88%
4.Принципиальная схема рулевого электропривода
В соответствии с заданием схема рулевого электропривода должна быть выполнена по системе «генератор-двигатель». На рис.представлен один из возможных вариантов такой схемы.
Условные обозначения, принятые на схеме
M - приводной электродвигатель;
G - генератор;
LG1, LG2-обмотки возбуждения генератора;
М2 - исполнительный электродвигатель;
LM2 - обмотка возбуждения двигателя;
UZ- выпрямитель;
F - предохранители, служат для защиты схемы управления от токов К.З.; SB1, SB2 - кнопки управления «лево», «право»;
SB3 - кнопка «ускоренно»;
SI, S2 - контакты конечных выключателей, отключающие двигатель при достижении максимального угла перекладки;
К1 - грузовое реле, обеспечивающее защиту двигателя от перегрузки по току, переводя его работу на меньшей скорости;
К1.1 - контакт грузового реле;
Q- автомат, обеспечивающий защиту от К.З.;
R2 - сопротивление, обеспечивающее переключение двигателя на малую скорость;
R3, R4 - разрядные сопротивления, которые защищают обмотки от пробоя изоляции при отключении питания;
HI, Н2, НЗ - сигнальные лампочки;
R5 - сопротивление, регулирующее яркость горения ламп.
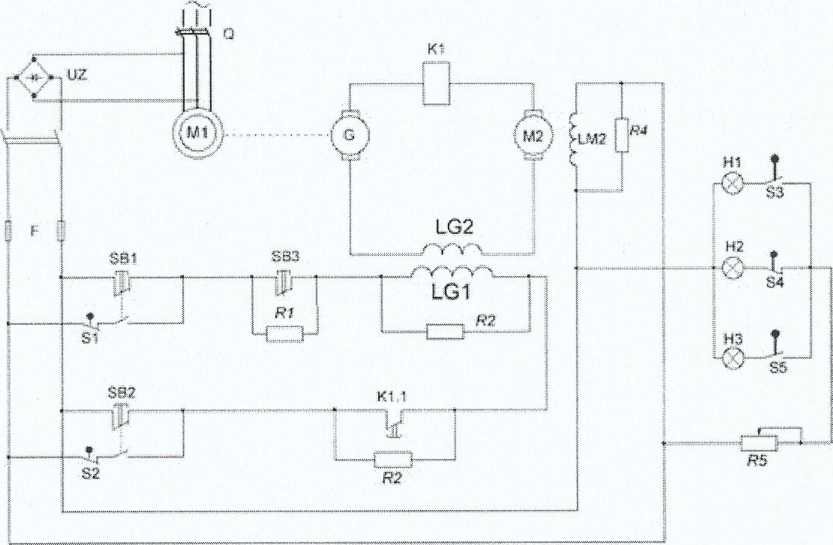 Схема управления рулевого электропривода по системе Г-Д с кнопочным постом
Схема управления рулевого электропривода по системе Г-Д с кнопочным постом
|
Работа схемы рулевого электропривода
При включении автомата Q подается питание на двигатель Ml и на выпрямитель UZ. Двигатель Ml начинает вращать генератор G1.
При замыкании выключателя Q1, получает питание схема управления, при этом обмотка возбуждения двигателя LM2 создает магнитный поток, схема готова к работе.
Для перекладки руля влево необходимо нажать кнопку SB1 прии этом получит питание обмотка LG1 и создаст магнитный поток генератора.
Генератор G1 возбудится и подаст питание на рулевой двигатель М2. Двигатель начнет перекладку руля влево. Для увеличения скорости перекладки руля надо дополнительно нажать кнопку SB3. При этом ток возбуждения в обмотке LG1 возрастет, напряжение генератора G1 увеличится и двигатель М2 начнет работать с большей скоростью. При отключении кнопки SB1 двигатель М2 теряет питание и переходит в режим динамического торможения.
Перекладка руля вправо происходит аналогично. При этом рулевой двигатель М2 реверсируется за счет изменения полярности напряжения на якоре.
Если в процессе работы рулевого электропривода нагрузка на валу двигателя М2 недопустимо увеличится, сработает грузовое реле (реле тока) К1 и разомкнет свой контакт К1.1. При этом ток возбуждения генератора G1 уменьшится, напряжение генератора уменьшится, рулевой двигатель начнет вращаться с меньшей скоростью и, следовательно, ток в цепи якоря двигателя уменьшится.
Используемая литература
1. Федотов Ю.В. Судовые автоматизированные электроприводы. Учебно-методическое пособие по выполнению курсового проекта. - СПб: СПБГУВК, 2009.
2. Судовые электроприводы. Справочник. Под редакцией И.Р.Фрейдзона т. 1 и 2. - Л.: Судостроение, 1975.
Дата добавления: 2015-09-05; просмотров: 148 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Выполнил : ст ЭМ-41 Владимиров Д.И. | | | Выбор межсетевых устройств |