Читайте также:
|
Рисунок 3- Кинематическая схема редуктора тяговой лебедки
Кинематически тяговая лебедка состоит из тех же узлов, что и грузовая, т. е. электродвигателя 4 типа Д-41 мощностью 24 кВт при частоте вращения 970 об/мин, зубчатой муфты 3, трехступенчатого цилиндрического редуктора 2 с передаточным числом i=25,2, двухколодочного нормально замкнутого грузового тормоза 1 с электромагнитным выключением и двух барабанов 5 и 6 с канавками. В отличие от грузовой лебедки оба барабана имеют одинаковый диаметр, равный 700 мм. Однако конструкция обоих барабанов различная: барабан 5 выполнен цельнолитым и крепится на ведомом валу лебедки на шпонке; барабан 6 сборный. В качестве ступицы барабана использовано храповое колесо 5, закрепленное на том же валу шпонкой, В теле диска барабана 6с внутренней стороны сделаны шесть пазов под собачки 7 храпового устройства. Последние пружинами постоянно прижаты к зубьям храпового колеса. С обеих сторон храповой механизм ограничен двумя дисками 9, соединенными болтами с барабаном 6.
Наличие храпового устройства внутри барабана необходимо для натяжения тягового каната при его удлинении.
Перемещение грузовых тележек вдоль фермы осуществляется тяговой лебедкой с барабанами 12 и 13 (см. рис. 2) посредством трех тяговых канатов 10,11 и 14, два из которых огибают концевые блоки 7 и 18 фермы. Концы канатов 11 и 14 закрепляются на барабанах с различных сторон, поэтому при вращении вала барабанов один конец каната свивается с барабана, а другой навивается.
Грузовая тележка (рис.4) несет неподвижные блоки грузового полиспаста, поддерживающего траверсу со звеном. Рама тележки состоит из двух сварных боковин 7, соединенных болтами с распорными втулками. В средней части тележки на осях 5 на подшипниках попарно посажены блоки б. По концам рамы с обеих ее сторон на осях 3 укреплены балансиры 2 с безребордными опорными катками 4, которыми тележка передвигается по нижним полкам главной балки фермы. Для лучшего направления тележки вдоль балки с обеих сторон боковин укреплены кронштейны 8, в которых на. осях укреплены безребордные ролики 9. Для разведения балок канатных поддержек в стороны для прохода через них в нижней части боковин тележки приварены направляющие лыжи 7, а для воздействия на конечные выключатели ограничителей хода тележки верхние части боковин снабжены планками, сужающимися по концам. Тяговые канаты коушами 10 крепятся на втулках крайних болтов, скрепляющих боковины.
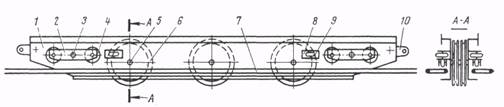
Рисунок 4- Грузовая тележка.
Траверса (рис. 5) для крана служит грузозахватным устройством. Она представляет собой коробчатую балку 2, по концам которой шарнирно укреплены две поперечные полуавтоматические траверсы 1 и 5 с клещевыми захватами, а для подвешивания к ферме крана—подвижные блоки 3 грузового полиспаста, свободно посаженные на осях 4. Траверсы обеспечивают полуавтоматический захват головок рельсов типов Р50, Р65 и Р75. Конструкцию и работу траверс можно проследить по рис. 28, б, в. Внутри коробчатой балки 1 расположены две пары челюстей 2 для захвата головок рельсов звена, два стопора 8 с коленчатыми рычагами 9 и противовесами 10, рукоятка 15 для ручного освобождения стопоров, рукоятка_ 14 с тягой 12 для выключения замковых рычагов 6, стержни 5, соединенные с челюстями и толкателем 3, опирающиеся на головки рельсов. Для управления двумя стопорами от одной рукоятки предусмотрена рычажная передача, имеющая три канатика 11 и двуплечий рычаг 13. За счет пружины 7 замковые рычаги 6 постоянно прижаты к большему или меньшему диаметру стержней 5. При опускании траверс на звено за счет веса грузозахватного устройства челюсти траверс разводятся в разные стороны, рукоятка 15 запирается в крайнее правое положение, при этом оба стопора 8 устанавливаются в выключенное положение. При поднятии траверс грузовыми канатами челюсти надежно захватывают головки рельсов звена. Для раскрытия челюстей и снятия траверс со звена его опускают до соприкосновения с балластом или звеном, рукоятки 14 перемещают вправо, а затем отпускают, рукоятку 15 перемещают влево. Тогда за счет противовесов 10 стопоры 8 выдвигаются в наружные стороны и удерживают челюсти от закрывания при последующем поднятии траверс.
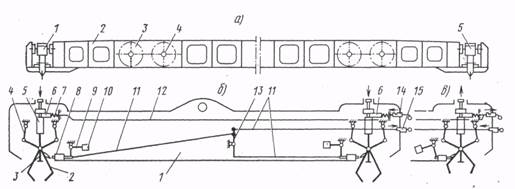
Рисунок 5- Траверса УК-25/9-18.
Ход работы
Принимаем за расчетное положение самый невыгодный случай, когда кран установлен на расчетном подъеме и производит вынос первого звена пакета (верхнего). При этом будет происходить трение выносимого звена и нижележащий пакет.
1. Определяем сопротивление перемещения тележек с грузом, Н по формуле:
2 · (G+G1+G2) · (μ+ƒ d)
W1 = 2 ·Кр + (G1+G2) tgα, (1)
Д
где G = 1,8·105 Н вес звена;
G1 = 2,3·104 Н вес траверсы;
G2 = 7,4·103 Н вес тележек;
μ = 0,06 см – коэффициент трения качения;
ƒ = 0,01 см – коэффициент трения скольжения;
Кр = 1,5 см – коэффициент трения реборд;
α – угол наклона пути α = 0042¹;
Д = 15 см диаметр колес тележек;
d = 4 см диаметр цапф колес.
W1 = 2 · (1,8·105+2,3·104+7,4·103) · (0,06+0,01· 4)·1,5 + (1,8·105+2,3·104)·0,012=5790Н
15 2
2. Определяем сопротивление трения грузового каната, Н:
W2 = G+G1 · (кn-1 – 1), (2)
іn
где in = 4 – кратность грузового полиспаста;
n = 10 – число вращающихся блоков при движении тележек;
к = 1,01 – коэффициент трения в блоке.
W2 = 1,8·105+2,3·104 · (1,0110-1 – 1) = 4560 Н
3. Определяем сопротивление при натяжении тягового каната, Н:
W3 = q 1 ℓ к2, (3)
8n
где q1 = 5,9 н/м вес 1м каната dк = 13мм;
ℓк = 4,7 м длина провисающего каната, м.
h = 1 · ℓк = 1 · 4,7 = 0,047 м – допускаемая высота провисания
100 100 каната.
W3 = 5,9·4,72 = 34,5 Н
8·0,047
4. Определяем сопротивление трения выносимого звена о пакет6
W4 = q2·ℓ1·ƒ1 , (4)
где q2 = 7200 Н – вес 1м звена;
ℓ1 = 7 Ом расстояние от места захвата звена до его конца;
ƒ1 = 0,015 – коэффициент трения бетона по стали.
W4 = 7200 · 7 · 0,015 = 756 Н
5. Определяем общую величину сопротивления при установившемся движении, Н:
W = W1+W2+W3+W4 = 5790+4560+34,5+756 =11140 Н =11,14 кН
6. Определяем разрывное усилие тягового каната:
Sр = w · n, (5)
где n = 6 коэффициент запаса прочности каната.
Sр = 11140 · 6 = 66840 Н = 66,84 кН
Подбираем канат по ГОСТ 3010-74 канат dк = 13 мм. 13-1-Л-К-Н-130
7. Определяем минимальный диаметр барабана:
Дб = e · dk, (6)
где е = 20 для тяжелого режима работы.
Дб = 20·13 = 260 мм
конструктивно принимаем диаметры двух барабанов одинаковыми = 700 мм.
8. Определяем частоту вращения барабанов:
nб = 60V, (7)
πДб
где V = 1,5 м/с – скорость передвижения звена.
nб = 60·1,5 = 40 мин-1
3,14·0,7
9. Определяем мощность электродвигателя:
N = W·V = 11140·1,5 = 19,2 кВт
1000·η 1000· 0,85
где η = 0,85 – к.п.д. механизма.
по каталогу подбираем электродвигатель Д – 41 при ПВ 25% N = 24 кВт
nд = 970 мин-1 .
10. Определяем передаточное число редуктора тяговой лебедки
iр = nд = 970 = 25
nб 40
Вывод:
Вопросы для защиты практической работы 6.
1. Назначение укладочных кранов?
2. Расскажите из каких основных узлов состоит УК-25/9-18.
3. Расскажите из каких узлов состоит крановое оборудование УК-25/9-18?
4. Конструкция портальных стоек?
5. Назначение, конструкция тяговой лебёдки?
6. Какие устройства безопасности установлены на УК-25/9-18?
Исходные данные
| Вар. .. Показат. | Вес кран. тележ. | Скор. передв. звена | Диаметр колес тележек | Диаметр цапф. кол. | Коэффиц. трения качения | Коэффиц. трения скольж. | Коэффиц. трения реборд | Угол накл.пути | Коэф.трен. в блоке | Отношение | Коэф трения звена о паксий |
| Усл. обознач | G3 | Vзв | D | d | μ | f | Kp | α | K | h/lк | f1 |
| Един. изм. | kH | м/сек | см | см | ____ | ____ | град | ||||
| 1. | 4,9 | 1,4 | 15,3 | 5,0 | 0,03 | 0,01 | 1,50 | 0º4´ | 1,01 | 0,01 | 0,016 |
| 2. | 2,6 | 1,41 | 15,2 | 5,1 | 0,031 | 0,011 | 1,51 | 0º15´ | 1,02 | 0,011 | 0,017 |
| 3. | 5,4 | 1,42 | 15,1 | 5,2 | 0,032 | 0,012 | 1,52 | 0º16´ | 1,01 | 0,012 | 0,016 |
| 4. | 2,7 | 1,43 | 15,0 | 5,3 | 0,033 | 0,013 | 1,53 | 0º17´ | 1,02 | 0,013 | 0,015 |
| 5. | 4,2 | 1,44 | 15,1 | 5,4 | 0,034 | 0,014 | 1,54 | 0º18´ | 1,01 | 0,014 | 0,014 |
| 6. | 2,8 | 1,45 | 15,2 | 5,5 | 0,035 | 0,015 | 1,55 | 0º19´ | 1,02 | 0,015 | 0,013 |
| 7. | 4,5 | 1,46 | 15,3 | 5,4 | 0,036 | 0,016 | 1,56 | 0º20´ | 1,03 | 0,016 | 0,012 |
| 8. | 2,9 | 1,47 | 15,4 | 5,3 | 0,037 | 0,017 | 1,57 | 0º21´ | 1,04 | 0,017 | 0,011 |
| 9. | 4,5 | 1,48 | 15,5 | 5,2 | 0,038 | 0,018 | 1,58 | 0º22´ | 1,05 | 0,018 | 0,012 |
| 10. | 3,0 | 1,50 | 15,4 | 5,1 | 0,039 | 0,019 | 1,59 | 0º23´ | 1,04 | 0,019 | 0,011 |
| 11. | 4,6 | 1,51 | 15,3 | 5,0 | 0,040 | 0,020 | 1,60 | 0º24´ | 1,03 | 0,02 | 0,010 |
| 12. | 2,9 | 1,49 | 15,2 | 5,1 | 0,041 | 0,021 | 1,61 | 0º25´ | 1,02 | 0,019 | 0,009 |
| 13. | 4,3 | 1,48 | 15,1 | 5,2 | 0,042 | 0,020 | 1,62 | 0º26´ | 1,01 | 0,018 | 0,008 |
| 14. | 2,8 | 1,51 | 15,0 | 5,3 | 0,043 | 0,019 | 1,63 | 0º27´ | 1,02 | 0,017 | 0,007 |
| 15. | 4,1 | 1,52 | 15,1 | 5,0 | 0,044 | 0,018 | 1,64 | 0º28´ | 1,03 | 0,016 | 0,006 |
| 16. | 2,7 | 1,53 | 15,2 | 5,1 | 0,045 | 0,017 | 1,65 | 0º29´ | 1,04 | 0,015 | 0,005 |
| 17. | 4,0 | 1,54 | 15,3 | 5,2 | 0,046 | 0,016 | 1,66 | 0º30´ | 1,05 | 0,014 | 0,004 |
| 18. | 2,6 | 1,55 | 15,4 | 5,3 | 0,047 | 0,015 | 1,67 | 0º31´ | 1,04 | 0,013 | 0,003 |
| 19. | 3,8 | 1,57 | 15,5 | 5,4 | 0,048 | 0,014 | 1,68 | 0º32´ | 1,03 | 0,012 | 0,002 |
| 20. | 2,7 | 1,58 | 15,4 | 5,5 | 0,049 | 0,013 | 1,69 | 0º33´ | 1,02 | 0,011 | 0,015 |
| 21. | 3,5 | 1,57 | 15,3 | 5,4 | 0,050 | 0,012 | 1,70 | 0º34´ | 1,01 | 0,01 | 0,014 |
| 22. | 2,8 | 1,56 | 15,4 | 5,2 | 0,051 | 0,011 | 1,50 | 0º35´ | 1,02 | 0,011 | 0,013 |
| 23. | 3,7 | 1,55 | 15,3 | 5,3 | 0,052 | 0,010 | 1,51 | 0º36´ | 1,03 | 0,012 | 0,012 |
| 24. | 2,9 | 1,54 | 15,5 | 5,2 | 0,053 | 0,011 | 1,52 | 0º37´ | 1,04 | 0,013 | 0,011 |
| 25. | 4,2 | 1,53 | 15,4 | 5,1 | 0,054 | 0,012 | 1,53 | 0º38´ | 1,03 | 0,014 | 0,010 |
| 26. | 2,7 | 1,52 | 15,5 | 5,1 | 0,055 | 0,013 | 1,54 | 0º39´ | 1,02 | 0,015 | 0,009 |
| 27. | 4,8 | 1,50 | 15,6 | 5,2 | 0,056 | 0,014 | 1,55 | 0º40´ | 1,01 | 0,016 | 0,008 |
| 28. | 2,9 | 1,49 | 15,7 | 5,3 | 0,057 | 0,015 | 1,56 | 0º41´ | 1,03 | 0,017 | 0,007 |
| 29. | 4,7 | 1,48 | 15,5 | 5,4 | 0,058 | 0,016 | 1,57 | 0º42´ | 1,03 | 0,018 | 0,006 |
Дата добавления: 2015-10-28; просмотров: 155 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Уголки-стенды | | | Перегрузка операторов |