Читайте также:
|
Храповые и мальтийские механизмы относятся к числу механизмов для преобразования непрерывного вращательного движения в прерывистое.
Храповые механизмы могут быть с наружным и внутренним зацеплением. В механизме с наружным зацеплением (рис. 2.23, а) собачке 1 сообщается качательное движение. При движении справа налево собачка через зубья храпового колеса 2 поворачивает его на некоторый угол. При обратном ходе собачка проскальзывает по зубьям храпового колеса, не вращая его. В храповом механизме с внутренним зацеплением (рис. 2.23, б) вал с жестко посаженным на нем диском, к которому прикреплена собачка 1, имеет колебательное движение, и собачка, вращаясь слева направо, поворачивает храповое колесо 2; когда собачка движется в обратном направлении, храповое колесо не вращается.
На рис, 2.23, в показана схема привода храпового механизма. Качательное движение собачка 1 получает через шатун от ведущего кривошипного диска 5 с пальцем 4. Изменение положения пальца 4 в пазу (т.е. изменение радиуса R) позволяет регулировать угол поворота а собачки 1 и тем самым угол поворота храпового колеса 2 за один оборот ведущего диска 5. Движение храпового колеса реверсируется переводом собачки 1 в положение, показанное тонкими линиями.
Изменять угол поворота храпового колеса при неизменном положении кривошипного пальца 4 можно щитком 3, который закрывает часть зубьев храпового колеса, и собачка в начальный период движения скользит по его поверхности, а затем, сходя с него, захватывает зубья храпового колеса и поворачивает его. Щиток в выбранном положении удерживает фиксатор 6.
|
|

В мальтийском механизме (рис. 2.24) при вращении кривошипа палец или ролик заходит в паз креста и за каждый оборот поворачивает его на 1/z часть (z - число пазов), т. е. передаточное отношение мальтийского механизма i = 1/z обычно z= 3... 8.
Особые соотношения параметров мальтийского механизма: 2β=2π/z; α+ β =π/2, где α – половина центрального угла кривошипа за период поворота креста на угол β; β – половина угла между соседними пазами креста.
Если решить эти уравнения относительно 2α, то центральный угол рабочего поворота кривошипа 2α = π – 2β = π – 2 π /z = π(z – 2) / z; отсюда определяем значение центрального угла холостого хода кривошипа:
2γ=2π – 2α=2π - π(z – 2) / z= π(z + 2) / z
Время полного цикла Т = tр + tx, откуда 1= tр / Т + tx /Т, где tр время поворота креста; tx — время пребывания креста в покое.
При равномерном движении кривошипа (углы α, β и γ выражены в радианах)
tр / Т=2α/ 2 π=(z – 2)/ 2 z и tx /Т=2 γ/2 π= (z + 2)/ 2z
Правильное соотношение между размерами мальтийского механизма выражается следующей зависимостью: R =lsin β = lsin π/ z
Для того чтобы в начале поворота креста, когда палец входит в зацепление, не было жесткого удара, начальная угловая скорость креста должна быть равна нулю. Иначе необходимо, чтобы β+ α= 90°, т.е. палец должен входить в паз креста в радиальном направлении.
МУФТЫ
Муфты служат для постоянного или периодического соединения двух соосных валов и для передачи при этом вращения от одного вала другому. Различают муфты постоянные, служащие для постоянного соединения валов; сцепные, соединяющие и разъединяющие валы во время работы; предохранительные, предотвращающие аварии при внезапном превышении нагрузок; обгона, передающие вращение только в одном направлении.
Постоянные муфты применяют в тех случаях, когда нужно соединить два вала, которые в процессе работы не разъединяются. При этом валы могут быть соединены жестко или с помощью упругих элементов (рис. 2.25, а-г).
Сцепные муфты применяют для периодического соединения лов, например в приводе главного движения или приводе подач станков. В станках часто применяют сцепные кулачковые муфты в виде дисков с торцовыми зубьями-кулачками (рис. 2.25, д) и зубчатые муфты (рис. 2,25, е). Недостатком сцепных муфт является то, что при больших разностях скоростей вращения ведущего и ведомого элементов муфты нельзя включить.
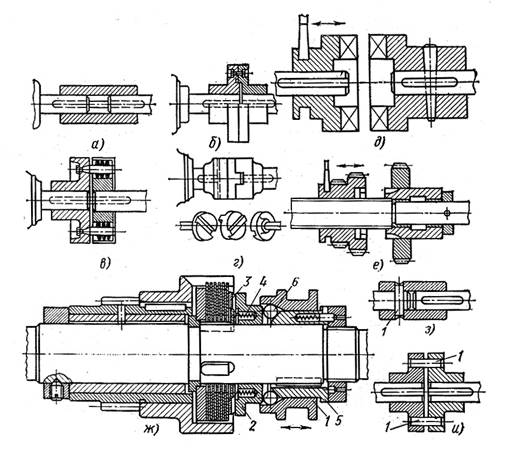
Рис. 2.25 Муфты
Фрикционные сцепные муфты имеют то же назначение, что и кулачковые, но свободны от недостатка, присущего кулачковым муфтам, т. е. фрикционные муфты можно включать при любых разностях скоростей вращения элементов муфты. У фрикционных муфт при перегрузках ведомое звено может проскальзывать и тем самым предотвращать аварию. Наличие нескольких поверхностей трения дает возможность передавать значительные крутящие моменты при относительно малых величинах давления на поверхностях трения дисков.
Фрикционные муфты бывают конусные и дисковые. На рис, 2.25, ж показана фрикционная многодисковая муфта, которую применяют в приводах главного движения и подачи металлорежущих станков. При перемещении гильзы 1 влево шарики 6, находящиеся между коническими поверхностями гильзы 1 и неподвижной втулкой 5, давят на диск 2, который, в свою очередь, через упругую шайбу 3 сцепляет подвижные ведущие диски с ведомыми. Для выключения муфты гильзу 7 отводят вправо, и пружины 4 отжимают диск 2 в исходное положение.
Общий вид фрикционной многодисковой контактной электромагнитной муфты показан на рис. 2.26, а. Муфта имеет катушку 4 электромагнита, в которую подается постоянный электрический ток через контактные щетки, прижимаемые щеткодержателями к токопроводящим кольцам 2, расположенным во втулке 3. Если кольцо одно, то один вывод катушки припаивают к нему, а второй — к корпусу 1 муфты; тогда ток замыкается через детали муфты и механизмы станка. При наличии двух колец оба вывода катушки припаивают к кольцам. Когда в катушку 4 подается электрический ток, якорь 5 перемещается влево, притягивается к корпусу 1 и с помощью тяг, проходящих через наружные пазы втулки 13, перемещает влево нажимной диск 9. Диск 9 сжимает пакет фрикционных дисков 8 и 7 и прижимает их к регулировочной гайке 6, которая застопорена винтом 14.

Рис. 2.26 Фрикционная многодисковая электромагнитная контактная муфта
Внутренние диски (рис. 2.26, б) на обоих торцах имеют фрикционные накладки из порошкового материала, а также спиральные канавки одного направления для циркуляции масла. Диски посажены на шлицевую втулку 13 (см. рис. 2.26, а) и свободно вращаются относительно поводка 10. Наружные диски (рис. 2.26, в) сцепляются с поводком 10 (см. рис. 2.26, а), цилиндрический обод которого имеет пазы, и находятся в свободном положении относительно наружной поверхности шлицев втулки 13. Подвижные штифты 12 с пружинами 11 служат для отвода вправо нажимного диска 9 и якоря 5 при отключении муфты.
Фрикционная многодисковая бесконтактная электромагнитная муфта (рис. 2.27) отличается от контактной муфты в основном отсутствием скользящих контактов. Катушка 2 смонтирована в катушкодержателе 4, который центрируют и закрепляют отдельно. На втулке 5 закрепляют сварной корпус 1, который состоит из внешнего и внутреннего колец, соединенных между собой диском 3 из немагнитной стали.

Рис. 2.27 Фрикционная многодисковая бесконтактная электромагнитная муфта
Предохранительные муфты предназначены для предохранения механизмов станка от аварий при перегрузках. У муфт, показанных на рис. 2.25, з и и, предохраняющим звеном является штифт 1, сечение которого рассчитывают в зависимости от передаваемого крутящего момента. При перегрузках этот штифт срезается, происходит разрыв соответствующей кинематической цепи и тем самым предотвращается повреждение деталей станка.
Муфты обгона предназначены для передачи крутящего момента при вращении звеньев кинематической цепи в заданном направлении и для разъединения звеньев при вращении в обратном направлении, а также для сообщения валу двух различных движений (медленного — рабочего и быстрого — вспомогательного), которые осуществляются по двум отдельным кинематическим цепям. Муфта обгона позволяет включить цепь быстрого хода, не выключая цепи рабочего движения.

Рис. 2.28 Муфты обгона
В качестве муфт обгона можно использовать храповые механизмы (рис. 2.28, а). Вал 2 вращается от вала 1 через конические колеса z3/z4 и храповой механизм (колесо z4 свободно посажено на валу 2). Если одновременно включить цепь быстрого хода через передачу z1/z2, то вал 2 вместе с храповым колесом 4 будет вращаться быстрее зубчатого колеса z4 и собачка 3 будет проскальзывать. Муфта обгона роликового типа (рис. 2.28, б) состоит из закрепленного на валу корпуса (звездочки) 1, наружного кольца или втулки 2, связанной или составляющей одно целое с зубчатым или червячным колесом, шкивом и т. п., и нескольких роликов 3, помещенных в вырезах корпуса /. Каждый ролик отжимается одним — тремя, в зависимости от длины ролика, штифтами 4 с пружинами 5 в направлении к узкой части выемки между деталями 1 и 2. Если, например, ведущей частью является втулка 2, то при вращении ее в сторону, указанную на рисунке стрелкой, ролики увлекаются трением в узкую часть выемки и заклиниваются втулкой и корпусом муфты. В этом случае корпус 1 и связанный с ним вал будут вращаться с угловой скоростью втулки 2. Если при продолжающемся движении втулки 2 против часовой стрелки валу и корпусу 1 сообщить движение по другой кинематической цепи, направленное в ту же сторону, но имеющее скорость, большую по величине, чем скорость втулки 2, то ролики переместятся в широкую часть выемки и муфта окажется расцепленной. При этом детали 1 и 2 будут вращаться каждая со своей скоростью.
Ведущим элементом может быть любая из деталей 1 и 2. Если ведущим является корпус, то муфта сцепляется при его вращении по часовой стрелке или когда корпус, вращаясь в этом направлении, опережает втулку.
Дата добавления: 2015-09-05; просмотров: 719 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| МЕХАНИЗМЫ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ | | | РЕВЕРСИВНЫЕ МЕХАНИЗМЫ |