Читайте также:
|
Движение подачи РО осуществляется от отдельного односкоростного АД. Через кинематическую цепь, содержащую органы настройки (в виде коробки подач или гитары сменных зубчатых колес) и тягового устройства.
Тяговое устройство – механизм, преобразующий вращательное движение в поступательное (передачи винт гайка скольжение и качение, зубчато и червячно реечные передачи, кулачковый механизм). Расчетное соотношение для тягового устройства: один оборот тягового вала должен соответствовать одному шагу ТУ.
Такая структура характерна для фрезерных и расточных станков с ручным управлением:

Б) Разветвляющийся привод (см. схему в теме кинематическая структура станков) применяется в токарных и сверлильных станках с ручным управлением. Движение подачи рабочего органа осуществляется от РО шпинделя через кинематическую цепь, содержащую орган настройки (в виде коробки подач и тягового устройства).
ü ПП позиционирования для станков с ЧПУ
А) ПП на основе шаговых двигателей использовались ранее в станках с ЧПУ. В них применялись шаговые двигатели, ротор которых поворачивается на небольшой угол, малый при подачи каждого импульса от УЧПУ. Их структура имеет вид:
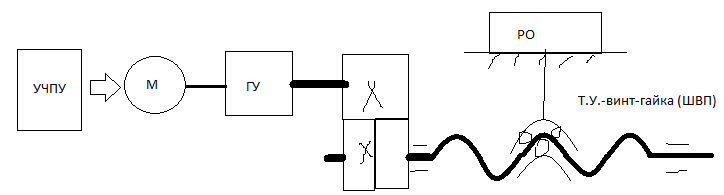
Расчетное соотношение: один импульс УЧПУ должен соответствовать углу 1.5° поворота ротора шагового двигателя.
УКБ: 
Общая величина перемещения определяется количеством поданных командных импульсов:

Скорость перемещения
Такие ПП являются разомкнутыми (т.е. без обратной связи по положению РО, в них отсутствует контроль фактического положения рабочего органа и на точность его перемещения влияют погрешности ШД, редуктора и ТУ). В качестве редуктора используют беззазорные зубчатые передачи.
Б) Следящие/замкнутые ПП. Используют замкнутые ЭД постоянного или переменного тока. Их выполняют по редукторной или безредукторной схеме, которая зависит от рабочих характеристик ЭД и развиваемым им крутящих моментов

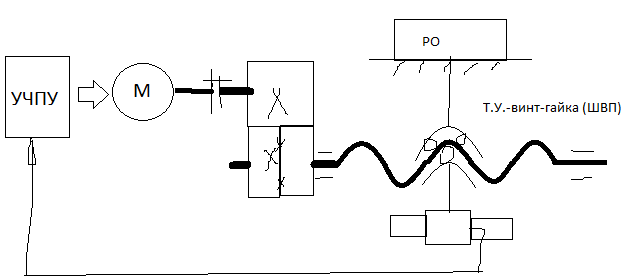
РС: 
УКБ: 
В следящих ПП для контроля положения рабочего органа используют различные виды ДОС, которые делят:
o По конструктивному исполнению
1. Круговые измерители ДОС – соединяются с ходовым винтом или встроены в двигатель
2. Линейные (индуктосины)
o По характеру выдаваемых сигналов
1. Аналоговые (индуктосины, вращающиеся трансформаторы – резольверы)
2. Дискретные (фотоэлектрические – энкодеры)
В следящих ПП происходит контроль по положению рабочего органа, скорости его перемещения (с помощью датчиков, встроенных в ЭД – тахогенераторы) и по току или напряжению. Если все эти датчики встроены в ЭД, то его называют серводвигателем.
Схемы с использованием круговых датчиков обычно используют линейные. ПП многоцелевых станков класса В, А, С.
Дата добавления: 2015-08-26; просмотров: 60 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Требования к ПП станков с ЧПУ | | | Особенности ПП в станках с ЧПУ |