|
Читайте также: |
Контроллер робота может требовать от встроенного компьютера ответ в течение менее 1 мс, в то время как при моделировании полета может быть приемлем ответ в 40 мс.
То есть, АС, работающая под управлением ОСРВ должна: собрать данные, произвести их обработку в соответствии с заданными алгоритмами, выдать управляющие воздействия (команду управления системой) за такой промежуток времени, который обеспечивает успешное решение поставленных перед системой задач.
Некоторые особенности ОСРВ.
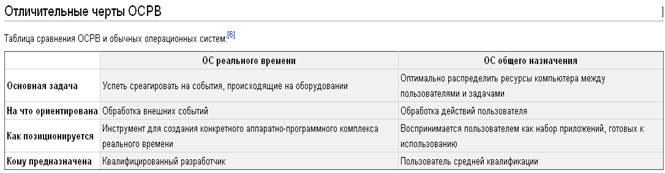
1. Чем принципиально отличаются операционные системы реального времени от операционных систем общего назначения? ОС общего назначения, особенно многопользовательские вроде UNIX, ориентированы на оптимальное распределение ресурсов компьютера между пользователями и выполняемыми процессами (системы разделения времени). В ОСРВ подобная задача отходит на второй план, все отступает перед главной целью — успеть среагировать на события, происходящие на объекте.
2. Практически все ОС, работающие в промышленной автоматизации являются системами реального времени.
Хорошим примером системы реального времени является ПО робота, который берет деталь, движущуюся по конвейеру. Если он опоздает, то пропустит один цикл работы конвейера, а попытка взять деталь слишком рано может заблокировать движение других деталей. Другой пример – ПО бортового компьютера самолета, летящего на автопилоте. Специальные датчики определяют положение самолета в трехмерном пространстве. Только постоянное и своевременное получение этих данных бортовым компьютером гарантирует безопасность полета.
2. Применение ОСРВ всегда связано с аппаратурой, объектом и событиями, происходящими на объекте. Система реального времени как аппаратно-программный комплекс включает в себя датчики, регистрирующие события на объекте, модули ввода-вывода, которые преобразуют показания датчиков в цифровой вид, пригодный для их обработки на компьютере, и, наконец, компьютер с программой, реагирующей на события в объекте. ОСРВ ориентирована на обработку внешних событий. Именно это обуславливает коренные отличия от ОС общего назначения по структуре, по функциям ядра, по построению системы ввода-вывода. ОСРВ может быть похожа на ОС общего назначения по пользовательскому интерфейсу (к этому, кстати, стремятся почти все производители ОС реального времени).
4. Принадлежность системы к классу систем реального времени ни как не связана с ее быстродействием, т.е. быстрая система - не обязательно система реального времени.
Действительно, иногда системой реального времени называют интерактивную систему с малым временем отклика. Рассмотрим следующий пример: набор текста в программе WinWord 2.0 на компьютере с процессором Athlon 1GHz. Время отклика в данном случае - это промежуток времени между нажатием клавиши и отображением соответствующей буквы в окне программы. Кажется очевидным, что эта величина в данном случае не имеет значения - все равно человек печатает медленнее. Значит обычная Windows - ОСРВ? Ошибка здесь заключается в подмене понятий - высокая скорость отклика совсем не означает гарантированность отклика. Загружая компьютер большим количеством ресурсоемких задач, мы можем увеличивать время отклика до бесконечности.
4. Исходные требования к времени реакции системы и другим временным параметрам определяются или техническим заданием на систему, или просто логикой ее функционирования. Интуитивно понятно, что быстродействие системы реального времени должно быть тем больше, чем больше скорость протекания процессов на объекте контроля и управления. Например, если система предназначена для контроля уровня грунтовых вод, то, даже выполняя измерения с периодичностью один раз за полчаса, она будет работать в реальном времени.
Способность аппаратуры компьютера и ОС к быстрому ответу зависит в основном от скорости переключения с одной задачи на другую и, в частности, от скорости обработки сигналов прерывания. Если при возникновении прерывания процессор должен опросить сотни потенциальных источников прерывания, то реакция системы будет слишком медленной. Время обработки прерывания в системах реального времени часто определяет требования к классу процессора даже при небольшой его загрузке.
В системах реального времени не стремятся максимально загружать все устройства, наоборот, при проектировании программного управляющего комплекса обычно закладывается некоторый «запас» вычислительной мощности на случай пиковой нагрузки. Статистические аргументы о низкой вероятности возникновения пиковой нагрузки, основанные на том, что вероятность одновременного возникновения большого количества независимых событий очень мала, не применимы ко многим ситуациям в системах управления. Например, в системе управления атомной электростанцией в случае возникновения крупной аварии атомного реактора многие аварийные датчики сработают одновременно и создадут коррелированную нагрузку. Если система реального времени не спроектирована для поддержки пиковой нагрузки, то может случиться так, что система не справится с работой именно тогда, когда она нужна в наибольшей степени.
Дата добавления: 2015-08-02; просмотров: 119 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Операционные системы реального времени, определение, назначение, особенности. | | | Архитектуры ОСРВ |