Читайте также:
|
F32y + F34y = 0.(4.14) Отсюда найдем проекцию F34y. Направление силы, приложенной к ползуну 3 от стойки 4, определяется ее знаком. Осталось неиспользованным уравнение моментов, которое употребим для определения плеча b силы (см. рис. 4.8, а): F34у (xD – xC) = 0,(4.15) откуда получим b = (xD – xC) = 0 и xD = xC. Таким образом, для структурной группы 2–3 были использованы шесть уравнений (4.10) – (4.15), из которых были определены все неизвестные. План сил, приложенных к звеньям структурной группы, представлен на рис. 4.8, б. Этот план наглядно показывает, как важно учитывать влияние ускоренного движения звеньев. Если им пренебречь, т.е. положить силы инерции и равными нулю (рис. 4.8, в), то такой неучет приведет к заниженным значениям сил в кинематических парах (сил,,), что особенно проявит себя в механизмах быстроходных машин. Перейдем к силовому расчету двухзвенного механизма, составленного из подвижного звена 1 и стойки 4 (рис. 4.9). К звену 1 приложены: ставшая известной сила момент М1, направленный, согласно рис. 4.7, по ходу часовой стрелки, главный момент сил инерции МФ1 и неизвестная по модулю и направлению реакция стойки. Напомним, что главный вектор сил инерции Ф1 = 0.
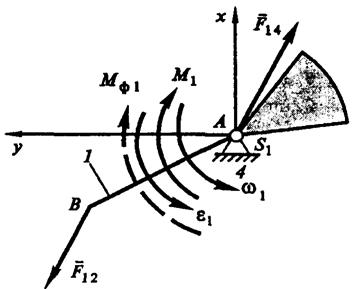 Рис. 4.9. Схема двухзвенного механизма для силового расчета Поскольку Ф1 = 0, уравнения проекций сил, приложенных к звену 1, т.е.,, приобретают вид F14x + F12x = 0; F14y + F12y = 0, отсюда F14x = – F12x, F14y = – F12y. Составим уравнение моментов для звена 1 относительно точки А: Момент подставим в уравнение с тем знаком, который он получает при подсчете по формуле Уравнение (4.18) является контрольным, поскольку все три слагаемых в его левой части известны. Однако оно может быть и расчетным, когда момент М1 неизвестен. Заметим, если нужно определить только внешний (уравновешивающий) момент М1и не обязательно определять силы в кинематических парах, то момент М1 можно найти и более коротким путем, не расчленяя механизм, а применив теорему Жуковского. При малой неравномерности вращения звена 1 его угловое ускорение ε1в начале расчета часто не определяют, поскольку оно мало. Однако принять вследствие этого МФ1 =– ε1J1A ≈ 0 нельзя. Неравенство момента МФ1 нулю вытекает из уравнения (4.18), поскольку моменты М1 и заведомо не равны и сильно различаются. Момент МФ1 может иметь значительную величину, что существенно для расчета главного вала машины (звена 1) на прочность.
Рис. 4.9. Схема двухзвенного механизма для силового расчета Поскольку Ф1 = 0, уравнения проекций сил, приложенных к звену 1, т.е.,, приобретают вид F14x + F12x = 0; F14y + F12y = 0, отсюда F14x = – F12x, F14y = – F12y. Составим уравнение моментов для звена 1 относительно точки А: Момент подставим в уравнение с тем знаком, который он получает при подсчете по формуле Уравнение (4.18) является контрольным, поскольку все три слагаемых в его левой части известны. Однако оно может быть и расчетным, когда момент М1 неизвестен. Заметим, если нужно определить только внешний (уравновешивающий) момент М1и не обязательно определять силы в кинематических парах, то момент М1 можно найти и более коротким путем, не расчленяя механизм, а применив теорему Жуковского. При малой неравномерности вращения звена 1 его угловое ускорение ε1в начале расчета часто не определяют, поскольку оно мало. Однако принять вследствие этого МФ1 =– ε1J1A ≈ 0 нельзя. Неравенство момента МФ1 нулю вытекает из уравнения (4.18), поскольку моменты М1 и заведомо не равны и сильно различаются. Момент МФ1 может иметь значительную величину, что существенно для расчета главного вала машины (звена 1) на прочность.
Дата добавления: 2015-08-10; просмотров: 37 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Порядок силового расчета. | | | Виды трения. |