Читайте также:
|
Микропроцессорная техника (МПТ) в настоящее время является основным средством реализации АСУТП. В состав серийной МПТ входит комплекс МикроДАТ (сосредоточенные микропроцессорные программируемые контроллеры – КТС ЛИУС-2 – комплекс технических средств для локальных информационно-управляющих систем), Ремиконт, Ломиконт и др.
КТС ЛИУС применяется в АСУТП, где эффективна централизация сбора, передачи, обработки и представления информации, но информационные объекты и типы решаемых задач не требуют применения управляющих вычислительных машин. КТС ЛИУС может быть также использован в АСУТП, где УВК находится на втором уровне иерархии.
В системах, где используются УВК находит применение КТС ЛИУС для создания отдельных периферийных устройств ввода, преобразования или вывода информации из УВК, также для создания локальных систем контроля и управления, обменивающихся информацией с УВК.
Для обмена информацией устройствами КТС ЛИУС и связи с другими устройствами ГСП применяются стандартные сигналы: кодированные, представляющие числовые значения непрерывных физических величин, дискретные величины и упорядоченные нечисловые сообщения; позиционные, представляющие события, предельные состояния и др.; непрерывные электрические частотные; постоянного тока и напряжения; напряжения переменного тока; активного сопротивления.
Микропроцессорные комплексы МикроДАТ обычно комплектуются в виде типовых агрегатируемых наборов для реализации локальных уровней АСУТП.
При использовании МикроДАТ важно, что в системе имеется дисплей: его клавиатура применяется для подачи необходимых команд, а его экран – для отображения хода технологического процесса. Экран служит также для индикации информации, получаемой от датчиков и вводимой вручную.
Для автоматического регулирования технологических параметров удобно применять регулирующие и управляющие микропроцессорные контроллеры Ремиконт, Ломиконт, Димиконт. Различные схемы АСУТП на базе Ремиконта приведены на рис.1.6,1.7,1.8.
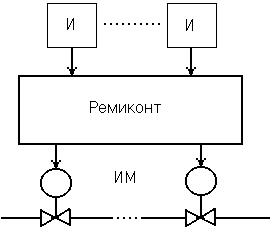
Рис.1.6 Ремиконт как многоканальный автоматический регулятор
На рис.1.6 Ремиконт выполняет задачи нескольких автономных регуляторов стабилизации соотношения. Источниками информации служат установленные на ОУ датчики технологических параметров И, а также пультовые задатчики. Управляющие сигналы к исполнительным механизмам ИМ идут через блоки ручного управления, установленные на пульте оператора-технолога. Эта структура – простейшая форма применения МПТ.
В системах, где более одного Ремиконта, задачи управления распределяются между отдельными контроллерами. Здесь достаточно эффективен принцип функционально-группового распределения. Технологический ОУ рассматривается как совокупность относительно автономных технологических групп параметров (рис.1.7). Функциональные группы распределяются между Ремиконтами. На рис.1.7 система имеет двухуровневую структуру: её нижний уровень составляют Ремиконты – регуляторы отдельных параметров (малоинерционные регуляторы со временем цикла τ, с), а верхний уровень составляют Ремиконты – регуляторы комплексных, в том числе расчетных, параметров (инерционные регуляторы со временем цикла nτ, с, где n > 1). Работоспособность такой системы в целом не нарушается при отказе отдельных Ремиконтов.
Задача обеспечения надежности системы может быть решена путем организации структурной избыточности введением резервных Ремиконтов (рис.1.8). В системе реализованы 3 группы функций управления: предварительная обработка информации – простейшие вычисления; отображение и регистрация информации с помощью дисплейного микропроцессорного контроллера Димиконта; регулирование технологических процессов с помощью Ремиконтов.

Рис.1.7 Структура иерархической двухуровневой системы управления

Рис.1.8 Схема с резервированием Ремиконтов
В составе системы 4 Ремиконта, 2 из которых предназначены для предварительной обработки информации и формирования управляющих воздействий; 3-ий Ремиконт резервирует управляющие функции первых двух; 4-ый готовит информацию для передачи в Димиконт с целью представления оператору регистрации. Переключение на резервный Ремиконт осуществляется по сигналу из основного Ремиконта при появлении в нем неисправностей. Ниже приведены характеристики некоторых устройств МПТ.
Регулирующий микропроцессорный контроллер Ремиконт Р-122 представляет собой микропроцессорное устройство управления для решения задач автоматического регулирования технологических процессов. Позволяет вести локальное, каскадное, супервизорное, программное, многосвязанное, экстремальное регулирование, а также управление с переменной структурой. Он формирует ПИД-закон регулирования, выполняет статические и динамические преобразования аналогичных сигналов, обрабатывает и формирует дискретные сигналы, выполняя основные операции управляющие логики. Ремиконт Р-122 может работать на нижнем уровне распределенной АСУТП, связываясь со средствами верхнего уровня через канал цифровой последовательной связи с интерфейсом (длина линии связи 1 км) и в качестве автономного изделия. В комплекте с Ремиконтом Р-122 могут использоваться обычные датчики и исполнительные механизмы, которые подключаются к нему с помощью индивидуальных кабельных связей.
Сигналы, поступающие в Ремиконт, обрабатываются в цифровой форме. Ремиконт Р-122 – программируемое устройство, но для работы с ним не нужны программисты. Программировать и работать с Ремиконтом может эксплуатационный персонал, связанный с обслуживанием традиционной аналоговой аппаратуры и не знакомый с вычислительной техникой и методами математического программирования.
Ремиконт Р-122 поставляется с завода-изготовителя полностью готовым к работе и программируется (настраивается) на решение требуемой задачи непосредственно на объекте с помощью специализированной клавишной панели. В процессе такой настройки наладчик назначает алгоритмы управления, конфигурацию управляющего контура, параметры статической и динамической настройки, устанавливает сигналы задания и режимы управления, запрограммированные параметры сохраняются при отключении питания.
Ремиконт Р-122 проектно-компонуемое изделие содержит базовый комплект аппаратуры, поставляемый всегда независимо от объема решаемой задачи, и проектно-компонуемый комплект, зависящий в основном от требуемого числа каналов ввода-вывода информации и определяемый при заказе потребителем. Отличительной чертой Ремиконта Р-122 является его высокая надежность – среднее время наработки на отказ около 100 тыс. часов. Столь высокий уровень надежности достигнут благодаря введению глубокой и непрерывной самодиагностики, сочетающейся с резервированием. К Ремиконту Р-122 могут подключаться аналоговые и дискретные датчики, а также аналоговые, дискретные и исполнительные механизмы.
Техническая характеристика
Число входов-выходов:
аналоговых до 64
дискретных до 126
импульсных выходов до 64
Входные дискретные сигналы, В:
логический «0» (любой знак) 0 – 2,4
логическая «1» (любой знак) 19,2 - 28,8
Выходные дискретные и импульсные сигналы (состояние контактов) сигналы, В:
логический «0» разомкнутое
логическая «1» замкнутое
Коммутирующая способность, В до 48 (0,2 А)
Число:
алгоритмических блоков 64
алгоритмов управления 45
Время цикла, с 0,27;0,51;1,02;2,04
Точность установки сигнала задания, % 0,1
Время сохранения информации при отсутствии питания, ч 360
Микропроцессорный контроллер Ломиконт Л-110 предназначен для решения широкого круга задач управления технологическими процессами. Ломиконт может работать как на нижнем уровне распределенной АСУТП под управление ЭВМ верхнего уровня, так и в качестве автономного изделия.
Ломиконт Л-110 имеет до 512 дискретных, 128 аналоговых и 8 счетно-импульсных входов, выполняет все операции управляющей логики, операции с 256 счетчиками, 64 таймерами, имеющими дискретность 100 мс и 1 с и диапазон от 100 мс до 24 часов, арифметические операции, а также разнообразные статические и динамические преобразования аналоговых сигналов, включая фильтрацию, интегрирование, интерполяцию, регулирование по ПИ и ПИД-законам и т.д.
В процессе управления Ломиконт выводит технологические сообщения, содержащие произвольный текст и текущее значение параметров управления, на печатающие устройства для документирования процесса управления, а также на экран пульта Ломиконта или дисплей для наблюдения за ходом процесса.
Для задач, требующих особенно высокой надежности работы контроллера, предусмотрена возможность полного дублирования Ломиконта с непрерывным обменом информацией между двумя контроллерами.
При выходе из строя основного контроллера происходит автоматический переход на резервный без нарушения процесса управления.

Рис.1.9 Структурная схема КТС на базе мини-ЭВМ
На рис.1.9 приведена схема КТС для АСУТП на базе УВК СМ-2м (мини-ЭВМ). В схеме использованы следующие элементы: Пр – процессор; КПДП – канал прямого доступа в память; ССО и ССС – соответственно субкомплексы связи с объектом и средств связи; СВВ – согласователь ввода-вывода; МВВИС и МВВДИ – соответственно модули ввода-вывода инициативных и дискретных сигналов; МКУБ – бесконтактный модуль кодового управления; МВС – модуль внутрисистемной связи; ДМ – дисплейный модуль; АЦП – аналогоцифровой преобразователь; Д – датчики сигналов (аналоговых или дискретных); ПРВ – пульт ручного ввода информации; УТ – универсальное световое табло; СТ – вспомогательное световое табло.
Схемой выполняются следующие функции: сбор, измерение и регистрация параметров технологических процессов и оборудования; обнаружение, отображение, регистрация и сигнализация отклонений от установленных пределов технологических параметров и показателей состояния оборудования; расчет технико-экономических показателей работы объекта; оперативное выполнение математико-логических операций диагностирования состояния узлов системы.
Дата добавления: 2015-07-25; просмотров: 257 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Средства измерения расхода газообразных, жидких и сыпучих материалов. | | | Показник, що характеризує ступінь не насиченості рослинних олій |