|
Читайте также: |
2 Передача данных TXD
3 Прием данных RXD
4 Запрос на пересылку RTS
5 Сигнал очистки для пересылки CTS
6 Сигнал готовности набора данных DSR
7 Земля GND
8 Сигнал наличия несущей CD
20 Сигнал готовности ввода данных DTR
22 Индикатор звонка RI
Операции с ROM BIOS
Прежде чем мы начнем писать собственную коммуникационную программу, давайте посмотрим, чем нам может помочь ROM BIOS? Она поддерживает коммуникации через последовательный порт, хотя и весьма ограниченно. Эти функции доступны через прерывание 14h. Существуют функции для открытия последовательного порта, его конфигурирования, чтения и записи символа. Однако существует одна маленькая проблема: эти функции не работают (трудно в это поверить, но они действительно не работают). На самом деле они работают, правда, при особых условиях, которые нам вряд ли удастся создать. К сожалению, отсутствует крайне необходимая нам поддержка ввода/вывода, управляемого прерыванием. В видеоиграх мы должны иметь систему управления событиями, основанную на прерываниях. Из-за этого, а также из-за того, что функции ROM BIOS работают очень медленно, мы можем вообще не рассматривать их как реальное средство передачи битов по проводам.
Теперь, когда я вам сказал об этом, давайте посмотрим, каким Образом все-таки можно соединить два компьютера и создать маленькую сетевую игру.
Соединение через нуль-модем
Как я уже сказал в самом начале, у нас не хватит времени вникать во все тонкости использования модема. Существует слишком много тем, которых мы слегка коснулись, и все они имеет отношение к дизайну видеоигр. Что я намерен сделать вместо этого, так это создать коммуникационную систему, использующую соединение типа нуль-модем, в котором модем, как таковой, отсутствует. Нуль-модем — простое соединение, которое связывает два компьютера через последовательные порты. Рисунок 14,1 демонстрирует такое соединение.

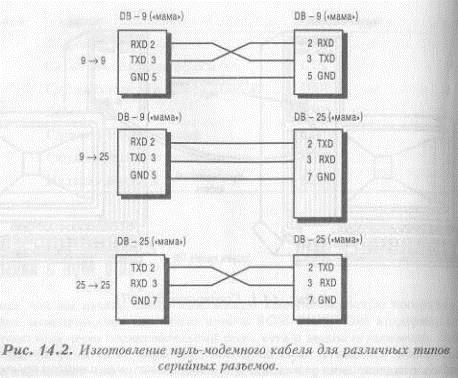
Чтобы изготовить такое соединение, мы должны взять нуль-модемный кабель с надлежащими разъемами. Это может оказаться не слишком просто, но если вы будете осторожны, то заработает с первой попытки. Мы будем использовать только три типа разъема:
§ Линию передачи данных;
§ Линию приема данных;
§ Землю.
На рисунке 14.2 показано, как сделать нуль-модемный кабель для разных типов разъемов.
Если вы не хотите изготавливать нуль-модемный кабель, вы можете заплатить за него в любом из компьютерных магазинов. (Пожалуйста, не платите больше 15$. Я не могу спокойно смотреть, как люди платят за кусок провода и пластик даже 1.50$). Сейчас официальный нуль-модемный кабель использует более трех шин, которые я перечислил. Он задействует все шины, имитируя тем самым модемное соединение. Пока у нас есть TXD, RXD и земля, мы тоже при деле. (Дополнительные линии используются для аппаратного обеспечения «рукопожатия», но мы не будем ими пользоваться.)
Отлично, теперь у нас есть нуль-модемный кабель, и мы знаем, какие Регистры что делают в UART'e. Я думаю, что теперь самое время начать писать коммуникационное программное обеспечение.
Построение коммуникационной библиотеки
Нам не надо иметь слишком много функций в нашей библиотеке. Фактически, нам достаточно шести функций:
§ Для инициализации последовательного порта;
§ Для установки процедуры обработки прерывания;
§ Для чтения символа из последовательного порта;
§ Для записи символа в последовательный порт;
§ Для определения состояния порта;
§ Для закрытия последовательного порта.
Инициализация последовательного порта
Вот шаги, которым мы должны следовать:
§ Сначала нужно установить номера передаваемых битов, количество стоп битов и тип четности. Это делается с помощью регистра управления линии (LCR);
§ Затем устанавливается скорость передачи загрузкой старшего и младшего байта делителя;
§ Далее нужно инициализировать UART для управления прерываниями;
§ Мы должны сообщить программируемому контроллеру прерываний ПК (PIC), какие прерывания по последовательному порту он должен допускать;
§ Наконец, необходимо активизировать прерывание, установив бит 3 или 4 в регистре маски прерываний (соблюдая осторожность, чтобы не изменить другие его биты).
Теперь обсудим эти шаги в деталях. Для инициализации порта мы должны, во-первых, установить количество бит, количество стоп-битов и тип четности. Это делается программированием регистра 3 управления линии (LCR). После этого нужно установить скорость передачи с помощью старшего и младшего байтов делителя скорости передачи.
Работа с делителем немного запутана. Вы знаете, что регистры 0 и 1 выполняют дополнительные функции загрузки двухбайтного делителя, деление на который числа 115200 дает результат, используемый UART как окончательная скорость передачи. Однако, как мы знаем, регистры 0 и 1 являются соответственно регистром поддержки передачи (THR) и регистром прерывания (IER). Когда бит 7 регистра управления линией установлен в 1, они получают номера 8 и 9, но продолжают адресоваться как 0 и 1. Ясно?
В качестве примера, давайте установим скорость передачи в 9600 бод. Мы могли бы найти число, которое при делении на него значения 115200 давало бы 9600. Это число 12. Далее мы должны запихнуть его в младший и старший байты. В этом случае младший байт будет равен 12, а старший - 0. Далее нужно установить бит 7 (DLAB) регистра управления линией в 1 и записать младший байт в регистр 0, а старший - в регистр 1, через которые переданные байты и попадут в регистры 8 и 9. После этого необходимо очистить бит 7 (DLAB) регистра управления линии. Это было бы не так уж и плохо, а?
Затем мы инициализируем UART для приема прерываний. Немного поговорим об этом. Когда UART принимает данные, символ будет оставаться в буфере приема только до тех пор, пока не прибудет следующий, после чего вновь пришедший символ заместит старый, независимо от того, был ли он считан. Мы не можем этого допустить, иначе потеряем информацию. Существует два решения этой проблемы:
§ Во-первых, мы могли бы в цикле опрашивать приемный буфер регистра, чтобы не потерять никаких данных. Но это было бы бесполезной тратой времени;
§ Во-вторых (и это гораздо лучше), можно написать для этой цели процедуру обработки прерывания (или ISR).
Если вы помните, в двенадцатой главе, "Мнимое время, прерывания и мультизадачность", говорилось, что в Си несложно установить новое прерывание, используя ключевое слово _interrupt. Мы напишем процедуру, которая будет активизироваться всякий раз с приходом прерывания. Но как нам сообщить UART, что прерывание обнаружено? Если вы пристально посмотрите на описание регистров, то поймете, что вам необходимо установить бит здесь бит там, и UART будет делать свою работу. Чтобы назначить прерывания, мы должны установить следующие биты в UART:
• Бит 0 (RxRDY) регистра прерывания (IER) должен быть установлен в 1;
• Бит 3 (GP02) регистра управления модемом (MCR) должен быть установлен в 1.
После этого мы уже готовы принимать прерывания, правильно? Ошибаетесь! Нужно сделать еще одну вещь. Мы должны сообщить программируемому контроллеру прерываний (PIC), какие именно прерывания по последовательному порту он должен задействовать. Чтобы выполнить это, необходимо изменить установки в регистре маски прерывания (IMP) PIC'a, который доступен через порт 21h. Таблица 14.3 показывает обозначение битов IMR.
Таблица 14.3. Регистр маски прерывания (IMR) PIC'a.
Бит 0: IRQ0 - используется для таймера
Бит 1: IRQ1 - используется для клавиатуры
Бит 2: IRQ2 – зарезервирован
Бит 3: IRQ3 - COM2 или COM4
Бит 4: IRQ4 - СОМ1 или COM3
Бит 5: IRQ5 - жесткий диск
Бит 6: IRQ6 - гибкий диск
Бит 7: IRQ7 - принтер
Таким образом, последняя вещь, которую нам необходимо сделать для обработки прерываний и запуска - активировать нужное прерывание по биту 3 или 4. Но будьте осторожны! Регистр инвертирован, так что 0 означает включен, а 1 — выключен.
Осторожно
Будьте осторожны, когда используете регистр маски прерываний. Он действительно может причинить неприятности компьютеру. Я предлагаю сперва считывать данные и маскировать их по шаблону, а потом уже писать новые данные.
Установка прерывания
Однажды пройдя через все эти фокусы, чтобы установить простое прерывание, можем окончательно инсталлировать наш собственный вектор ISR, зависящий от СОМ-порта. Запомните, что порты 3 и 4 используют те же самые прерывания, что и порты 1 и 2 соответственно.
Таблица 14.4. Векторы прерывания последовательного порта.
Дата добавления: 2015-07-12; просмотров: 201 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Последовательный порт Базовый адрес порта | | | Вектор Номер Адресная функция |