Читайте также:
|
Выполнил(и): студент(ы)__________________
__________________
__________________
__________________
группа__________________
Руководитель:
преподаватель__________________
Отметка о зачете:
__________________________________
дата
20____/ ____ учебный год
Цель работы:
1. Исходные данные:
| Плоскость | |||
| Величина неуравновешенной массы, г. | |||
| Расстояние от оси вращения ротора, мм. | |||
| Угол, составленный радиус - вектором массы с положительным направлением оси Х, град. |
Схема установки и расположения неуравновешенных масс
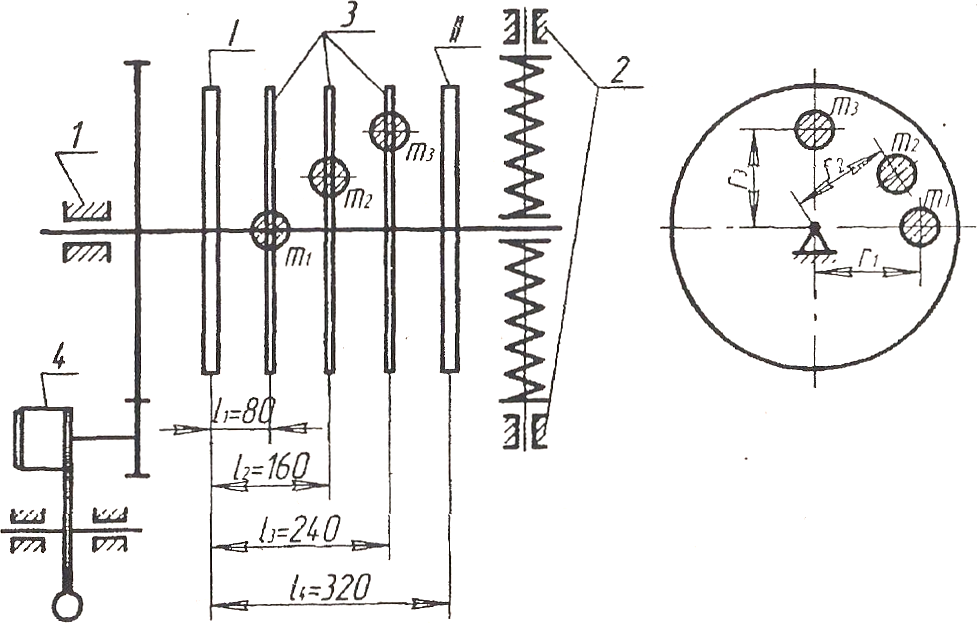
1 –
2 –
3 –
4 –
2. Статическое уравновешивание.
m1r1 = m2r2 = m3r3 =
3. Многоугольник статических дисбалансов ротора:
μ = 
4. Параметры противовеса:
mn = rn = αn =
Противовес установить либо в плоскости 1, либо в плоскости 2.
5. Полное уравновешивание.
а) Динамическое уравновешивание:
m1r1l1 = m2r2 l2 = m3r3 l3 =
Многоугольник динамических дисбалансов ротора
μ = 
Параметры противовеса в плоскости 11:
r 11 = m 11 = α 11 =
б) статическое уравновешивание:
m1r1 = m3r3 =
m2r2 = m11 r11=
Многоугольник статических дисбалансов ротора:
μ =
Параметры противовеса в плоскости 1:
m1 =
r1 =
α1 =
Вывод:
Контрольные вопросы
1. Что является причиной неуравновешенности ротора?
2. Какие виды неуравновешенности ротора вы знаете?
3. Условие статической уравновешенности ротора.
4. Условие динамической уравновешенности ротора.
5. Условие полной уравновешенности ротора.
6. Что такое статический дисбаланс?
7. Что такое динамический дисбаланс?
8. Указать минимум противовесов, необходимых для статического уравновешивания ротора.
9. Указать минимум противовесов, необходимых для полного уравновешивания ротора.
Дата добавления: 2015-09-04; просмотров: 63 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Расчет элементов неравносмещенного зацепления | | | ДИНАМИЧЕСКАЯ БАЛАНСИРОВКА РОТОРА |