|
Читайте также: |
Робот, двигающийся вдоль линии

Необходимые компоненты
1. Arduino UNO, 1 шт.

2. Полевой транзистор (MOSFET), 2 шт.

3. Коллекторный мотор, 2 шт.

4. Колеса, 2 шт.

5. Шаровая опора, 1 шт.

6. Светодиодная линейка, 1 шт.

7. Переключатель, 1 шт.

8. Батарейка «крона» 9 V, 1 шт.

9. Беспаечная макетная плата и провода


Подключение и программирование
Питание всей схемы осуществляется 9-ти вольтовой батарейкой «крона». Arduino подключается к питанию через пины Vin (+ батарейки) и Gnd (- батарейки). Так же с батарейки осуществляется питание мотора (см. ниже). Для того, чтобы иметь возможность включать и выключать питание переключателем, необходимо разорвать провод, идущий от минуса батарейки, и в место разрыва припаять переключатель.
О том, как паять смотри здесь: [1]
Управление включением/выключением моторов осуществляется с Arduino через полевые транзисторы (MOSFET), подключенные к цифровым пинам Arduino (D5, D6).

Рис.1. Полевой транзистор с обозначением ножек
Про полевые транзисторы смотри здесь: [2]
При подаче на затвор (З) транзистора логической единицы, он открывается и может пропускать ток от стока (С) к истоку (И). При подаче на затвор логического нуля транзистор закрывается и не пропускает ток. Таким образом, контроллер, который не способен выдавать большие значения электрического тока на своих выводах, может управлять мощной нагрузкой. В нашем случае в качестве нагрузки выступает коллекторный мотор. Контакты + и – на рисунке 2 подключаются к батарейке в соответствии со знаком.
Рис.2. Схема подключения для 1-го мотора
Второй мотор подключается аналогичным образом через транзистор к пину D6.
Управление скоростью вращения моторов происходит при помощи широтно-импульсной модуляции (ШИМ). Про ШИМ смотри здесь: [3]
Светодиодная линейка подключается к аналоговым выходам (A1-A6) и выходам Gnd и 5V на Arduino для питания линейки.
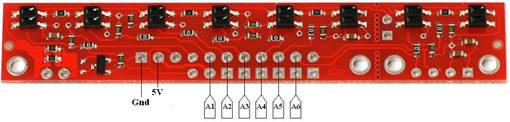
Рис.3. Подключение светодиодной линейки
Каждый вывод (A1-A6) при помощи функции analogRead(Номер пина) считывает уровень освещенности под соответствующим светодиодом.
Про программирование Arduino смотри здесь: [4-6].
Приведенного материала достаточно для первых шагов. Для написания же более продвинутых алгоритмов для робота необходимо освоить понятие PID регулятора.
Про PID регуляторы смотри здесь: [7]
Ссылки:
1. http://habrahabr.ru/post/117695/
2. http://wiki.amperka.ru/%D0%BA%D0%BE%D0%BD%D1%81%D0%BF%D0%B5%D0%BA%D1%82-arduino:%D0%BF%D0%BE%D0%BB%D0%B5%D0%B2%D0%BE%D0%B9-%D1%82%D1%80%D0%B0%D0%BD%D0%B7%D0%B8%D1%81%D1%82%D0%BE%D1%80
3. http://wiki.amperka.ru/%D0%BA%D0%BE%D0%BD%D1%81%D0%BF%D0%B5%D0%BA%D1%82-arduino:%D1%88%D0%B8%D0%BC
4. http://wiki.amperka.ru/arduino-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D1%8B%D0%B9-%D1%81%D1%82%D0%B0%D1%80%D1%82:start
5.
http://wiki.amperka.ru/%D0%BF%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BC%D0%B8%D1%80%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B5:%D1%81%D1%82%D1%80%D1%83%D0%BA%D1%82%D1%83%D1%80%D0%B0-%D0%BF%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BC%D1%8B-%D0%B4%D0%BB%D1%8F-arduino
6. http://wiki.amperka.ru/%D0%B2%D0%B8%D0%B4%D0%B5%D0%BE%D1%83%D1%80%D0%BE%D0%BA%D0%B8:%D0%B4%D0%B6%D0%B5%D1%80%D0%B5%D0%BC%D0%B8-%D0%B1%D0%BB%D1%8E%D0%BC
7. http://roboforum.ru/wiki/%D0%9F%D0%B5%D1%80%D0%B5%D0%B2%D0%BE%D0%B4_%D1%81%D1%82%D0%B0%D1%82%D1%8C%D0%B8_%22%D0%9F%D1%80%D0%BE%D1%81%D1%82%D0%BE_%D0%BE_%D0%9F%D0%98%D0%94-%D0%B0%D0%BB%D0%B3%D0%BE%D1%80%D0%B8%D1%82%D0%BC%D0%B0%D1%85%22
Дата добавления: 2015-09-02; просмотров: 83 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Подключение и программирование | | | Пояснювальна записка до вибору теми магістерської роботи |