Читайте также:
|
ПРОЕКТИРОВАНИЕ РЕДУКТОРОВ
общего назначения
|
| Рисунок 2.1 |
Машинный агрегат (рисунок 2.1) состоит из электродвигателя Э, редуктора Р и исполнительного рычажного меха-низма М периодического действия.
Вал двигателя и входной вал A редук-тора, а также выходной вал B редуктора и вал входного звена (кривошипа) рычаж-ного механизма соединены между собой муфтами. На валу кривошипа размещен маховик с целью снижения неравномерности хода.
Рабочий цикл агрегата совершается за один оборот кривошипа.
2.1 Исходные данные для пректирования редукторов:
- кинематическая схема (таблица 2.1);
- модули m зубчатых передач редуктора;
- условия проектирования одной из зубчатых пар внешнего зацепления (таблица 2.3);
- продолжительность (в секундах) рабочего цикла агрегата  , которая определяет частоту вращения
, которая определяет частоту вращения  и угловую скорость
и угловую скорость  выходного вала B редуктора
выходного вала B редуктора
 , об/мин;
, об/мин;  , рад/с.
, рад/с.
Требуется спроектировать редуктор при перечисленных выше исходных данных.
Содержание работы
2.2.1 Вывести формулу передаточного отношения  редуктора, выразив его величину через числа зубьев колес.
редуктора, выразив его величину через числа зубьев колес.
2.2.2 Оценить кинематические возможности редуктора, установив до-стижимые пределы его передаточного отношения и приемлемый диапазон частоты вращения  входного вала (или вала электро-двигателя, поскольку
входного вала (или вала электро-двигателя, поскольку  ).
).
2.2.3 Из каталога (таблица 2.2) выбрать приемлемый по частоте вращения  электродвигатель и уточнить требуемую величину пере-даточного отношения редуктора
электродвигатель и уточнить требуемую величину пере-даточного отношения редуктора  .
.
2.2.4 Подобрать числа зубьев всех колес редуктора, обеспечивая получение знака (если он оговорен в задании) и требуемой величины
 ; для соосных частей редуктора предусмотреть (если это возможно) многосателлитное исполнение; числа зубьев должны быть в пределах (16…120). По подобранным числам зубьев определить фактическое значение передаточного отношения
; для соосных частей редуктора предусмотреть (если это возможно) многосателлитное исполнение; числа зубьев должны быть в пределах (16…120). По подобранным числам зубьев определить фактическое значение передаточного отношения  и фактическую частоту вращения выходного вала редуктора =
и фактическую частоту вращения выходного вала редуктора =  (отклонение полученной величины от требуемой не должно превышать 2%).
(отклонение полученной величины от требуемой не должно превышать 2%).
При кинематическом расчете рычажного механизма частоту вращения вала кривошипа считать равной найденной здесь вели-
чине .
2.2.5 Выполнить кинематический расчет редуктора, используя выбранную в п. 3 частоту вращения вала электродвигателя и подобранные в п. 4 числа зубьев колес; для всех звеньев рассчитать частоту абсолютного вращения, а для звеньев, образующих вращательные пары, рассчитать также частоту относительного вращения.
Рассчитать соответствующие найденным частотам вращения угловые скорости.
2.2.6 Исследовать геометрию указанной в задании зубчатой пары внешнего зацепления.
а) выбрать коэффициенты смещения для колес исследуемой пары, обеспечивая получение передачи с заданными свойствами.
б) произвести геометрический расчет пары и проверить его правильность на компьютере с помощью контролирующей программы.
в) выполнить проверку геометрических показателей качества зацепления.
г) рассчитать измерительные размеры.
д) вычертить картину зацепления.
2.2.7 Исследовать энергетические и силовые соотношения для редуктора.
а) рассчитать значение момента полезного сопротивления  на выходном валу редуктора (если оно не задано), приняв его равным среднему значению движущего момента
на выходном валу редуктора (если оно не задано), приняв его равным среднему значению движущего момента  на валу кривошипа рычажного механизма; в общем случае для его расчета можно использовать соотношение
на валу кривошипа рычажного механизма; в общем случае для его расчета можно использовать соотношение
 ;
;
здесь  - угол (в градусах) качания звена рычажного механизма, нагруженного моментом
- угол (в градусах) качания звена рычажного механизма, нагруженного моментом  полезного сопротивления, Нм;
полезного сопротивления, Нм;  - ход звена (в метрах), нагруженного силой
- ход звена (в метрах), нагруженного силой  , Н; если механизм пре-одолевает только момент (или только силу ), то в этой формуле будет отсутствовать второе (соответственно, первое) слагаемое; любое слагаемое может повторяться, если у механизма не менее двух рабочих звеньев с однотипной нагрузкой.
, Н; если механизм пре-одолевает только момент (или только силу ), то в этой формуле будет отсутствовать второе (соответственно, первое) слагаемое; любое слагаемое может повторяться, если у механизма не менее двух рабочих звеньев с однотипной нагрузкой.
б) составить все необходимые уравнения равновесия и баланса мощностей с учетом потерь на трение в кинематических парах.
в) вывести расчетные формулы и рассчитать значения всех вращающих моментов с учетом трения; если значения КПД кинемати-ческих пар в задании не оговорены, руководствоваться величинами:  - для вращательной пары,
- для вращательной пары,  - для зацепления цилиндрическими колесами (как внешнего, так и внутреннего),
- для зацепления цилиндрическими колесами (как внешнего, так и внутреннего),  - для конического зацепления и
- для конического зацепления и  - для червячного; определить КПД редуктора
- для червячного; определить КПД редуктора  .
.
По тем же расчетным формулам определить значения вращающих моментов без учета трения и убедиться, что в этом случае = 1.0.
Для редукторов, выполенных по замкнутой схеме, установить характер распределения мощностей по ветвям кинематической цепи редуктора и установить наличие (или отсутствие) замкнутой мощности.
г) рассчитать величины окружных сил  в зацеплении; при этом одну из величин - или
в зацеплении; при этом одну из величин - или  (найденную без учета трения), считать заданной, а другую - проверить по результатам расчета усилий.
(найденную без учета трения), считать заданной, а другую - проверить по результатам расчета усилий.
Примечание: исходные данные к этой части задания кодируются в виде набора символов и обозначений дополнительных условий (если эти условия оговариваются, то они помещаются в круглые скобки); например
04( =3) - 3.5 -
=3) - 3.5 -  - 4(a,
- 4(a,  =1);
=1);
| здесь: | - обозначение схемы (таблица 2.1); | |
| ( = 3)
| - число сателлитов в соосной части редуктора; ес- | |
| ли количество сателлитовне оговаривается заранее, это условие может отсутствовать, (при этом предполагается, что >1);
| ||
| 3.5 | - модуль зубчатых колес, мм; | |
|
| - обозначение рассчитываемой зубчатой пары |
| внешнего зацепления; | ||
| - условие проектирования пары (таблица 2.3); | ||
| (a, =1)
| - дополнительные условия (могут отсутствовать); | |
в данном случае означают, что межосевое расстояние должно быть округлено до целого числа и коэффициент смещения у колеса  равен равен  . .
|
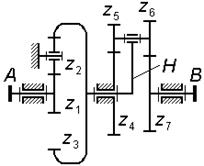
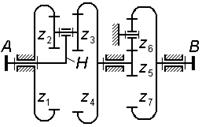
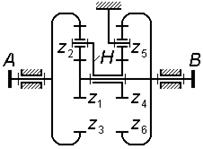
| Таблица 2.1 – Кинематические схемы редукторов | ||

| 

|  
|


|  
| 

|

| 
|  
|
| Таблица 2.1 (продолжение) | ||

 ; ; 
| 

| 

|

| 
| 
|

| 
| 
|
| Таблица 2.1 (продолжение) | ||

 ; ;
| 
 ; ;
|  ;
;
|
 ;
;
|  ;
;
| 
|

| 
|  ; ;
|
| Таблица 2.1 (продолжение) | ||

| 
|  ;
;
|
 ;
;
| 
 ; ;
| 
|
 ;
;
|  ;
;
| 
|
| Таблица 2.1 (продолжение) | ||
 ;
;
| 
 ; ;
|  ;
;
|

| 
| 
|
| Таблица 2.2 – Частоты вращения валов электродвигателей, об/мин | |||||||||
| №№ | 
| №№ |
| №№ |
| №№ |
| №№ |
|
| Таблица 2.3 – Условия проектирования зубчатой пары внешнего зацепления | |
| №№ | Условие |
| Набольшая изгибная прочность передачи. | |
| Набольшая контактная прочность передачи. | |
| Набольшая износостойкость передачи. | |
| Наибольшая плавность зацепления пары. | |
| Наибольшие диаметральные размеры шестерни. | |
| Наибольшие диаметральные размеры колеса. | |
| Наименьшие диаметральные размеры шестерни. | |
| Наименьшие диаметральные размеры колеса. | |
| Полюс в зоне двупарного зацепления у головки зуба колеса. | |
| Полюс в зоне двупарного зацепления у ножки зуба колеса. | |
| Внеполюсная передача (полюс у вершины зуба колеса). | |
| Внеполюсная передача (полюс у вершины зуба шестерни). |
Дата добавления: 2015-09-02; просмотров: 58 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Регуляторы давления | | | ОТ РЕДАКТОРА |