Читайте также:
|
Шаговые двигатели бывают с кинематической связью между ротором и статором (храповые устройства), они имеют невысокое быстродействие и малый срок службы, применяются редко.
ШД с электромагнитной связью между ротором и статором (синхронные электродвигатели). Эти ШД относятся к системам частотного регулирования синхронного электродвигателя с широким диапазоном изменения скорости. В ШД обмотки возбуждаются, питаются прямоугольными или ступенчатыми импульсами напряжения с изменяющейся частотой, что обеспечивает дискретное вращение электромагнитного поля и вращение ротора в виде дискретной последовательности элементарных угловых перемещений.
ШД с электронным коммутатором осуществляет преобразование унитарного кода управления в угол поворота вала, каждому импульсу управления соответствует поворот вала на фиксированный угол. Скорость вращения и суммарный угол поворота вала пропорциональны соответственно частоте и числу импульсов управления.
Таким образом, дискретный привод с ШД является синхронным следящим приводом, сочетающим в себе возможности глубокого частотного регулирования скорости вращения (до нуля) и числового заданного перемещения.
ШД используются в электроприводе с дискретным перемещением рабочего органа — узлов роботов, затворов, устройств надвигания станков и т. п., а также в электроприводе, где управляющий сигнал задается в виде последовательности кодовых импульсов в системах числового программного управления оборудованием.
Требуемое быстродействие, точность, устойчивость в заданном диапазоне частот и величина шага обеспечивается выбором типа шагового привода, который выпускается в широком диапазоне параметров.
Схема управления ШД состоит из электронного коммутатора, который имеет т выходных усилите-


Рис. 4.6. Схема шагового двигателя:
/ — электронный коммутатор; 2 — силовой усилитель; 3 — шаговый двигатель; 4 — устройство управления ШД; 5 — источник постоянного тока
Рис. 4.7. Схема управления электромагнитной муфтой скольжения
лей, равное числу фаз, и силовых усилителей (рис. 4.6). Схемы электронных коммутаторов определяются числом управляющих обмоток ШД и обычно используют реверсивный счетчик. Электронный коммутатор имеет два выхода для обеспечения реверса ШД. Сигналы на вход коммутатора поступают от программирующего устройства, в частности от микропроцессорной системы управления.
Применение электромагнитных муфт (ЭММ) дает возможность разделить пуск электродвигателей М и рабочих механизмов РМ, устранить удары как в электродвигателях, так и в механических передачах, обеспечить плавность разгона и снять перегрузки (рис. 4.7). Несмотря на значительно более низкий КПД по сравнению с электродвигателями, оснащенными тирис-торными преобразователями, область применения электромагнитных муфт весьма широка — от прецизионных приборных следящих систем до мощных регулируемых приводов. Индуктор электромагнитной муфты И вращается с постоянной скоростью асинхронным электродвигателем. Обмотка возбуждения индук-
тора питается постоянным током и при ее вращении в массивном якоре — Я возникает ток. Взаимодействие тока якоря с магнитным полем вращающегося индуктора создает вращающий момент на выходном валу привода рабочего механизма РМ. В рассматриваемой схеме электромагнитной муфты скольжения скорость и момент вала якоря и рабочей машины легко и в широких пределах регулируются изменением тока возбуждения I в. На рис. 4.7 показано питание индуктора от сети переменного тока через трансформатор Τ и выпрямитель В. Ток возбуждения изменяется резистором R.
Динамика электромагнитной муфты скольжения, связывающая угловую скорость вращения выходного вала ω с током возбуждения индуктора I в, характеризуется дифференциальным уравнением в операторной форме:
[TMTЭР2 + (TM + TЭ) Ρ + 1] ω = kIB, (4.22)
где TM — электромеханическая постоянная времени; Тэ= L и /R и
электрическая постоянная времени; L H, R и — индуктивность и активное сопротивление обмотки индуктора; k — коэффициент усиления, определяемый статической характеристикой ω = kI Β муфты. Используются индукционные муфты скольжения в приводах подачи лесопильных рам и круглопильных станков.
Наряду с электромагнитными муфтами скольжения применяются также электромагнитные муфты сухого трения, в которых передача мощности с одного вала на другой осуществляется через диски трения. Диски имеют возможность перемещаться по шлицам оси, вала. При включении электромагнитного устройства ведущие и ведомые диски сжимаются и между ними возникают силы трения.
В муфтах вязкого трения (ферропорошковые муфты) имеется постоянный зазор между ведущей и ведомой полумуфтами, который заполнен мелкими опилками железа с графитом. При подаче напряжения постоянного тока в обмотку муфты создается магнитное поле, которое в зазоре между полумуфтами создает из железных опилок цепочки, мостики, т. е. заполнитель как бы соединяет ведущую и ведомую полумуфту и создает момент вращения ведомой полумуфты с рабочим механизмом. Изменяя силу тока обмотки, можно регулировать скорость и момент вращения.
Характеристики электромагнитных муфт, определяющие зависимость передаваемого момента от тока управления в относительных величинах, показаны на рис. 4.8.
Выбор приводного двигателя ЭММ имеет особенности. Номинальная скорость приводного двигателя для фрикционных и ферропорошковых муфт должна выбираться с таким расчетом, чтобы частота вращения ведомых частей с учетом передаточ-
ного отношения редуктора ip между двигателем и ЭММ не превышала 1800... 2000 мин-1. Для индукционных муфт скольжения номинальная частота вращения приводного электродвигателя выбирается по возможности большей, так как это позволяет уменьшить габарит, массу ЭММ, а также улучшить ее динамические характеристики.
Выбор типа электродвигателя производится на основании принятых максимальной скорости птах. дв и жесткости механической характеристики hДВ-1
Максимальная мощность приводного электродвигателя без

Рис. 4.8. Характеристики электромагнитных муфт: а — скольжения; б — фрикционных; в — ферропорошковых
учета тепловых и вентиляционных потерь определяется выражением
N дв. max = 9,81 · 10-5 i pMmaxnH.ДВ, (4.23)
где i Ρ — передаточное отношение редуктора; пн. дв — номинальная частота вращения электродвигателя; Mmax — максимальный момент, передаваемый муфтой.
Для случая линейной экстраполяции механической характеристики трехфазного асинхронного электродвигателя

(4.24) и, следовательно,

На основании формулы (4.24) можно также заключить, что вращающий (тормозной) момент электродвигателя М дв (М дв = = h дв n mах.дв) должен значительно превосходить величину i pMmax, h дв — коэффициент наклона механической характери-
стики электродвигателя. Формулу (4.25) удобно применять для фрикционных и ферропорошковых муфт, когда Mmax не зависит или слабо зависит от пн дв.
Для индукционных муфт скольжения Мтах = СИВ2тахпн дв

(4.26)
где

D — средний диаметр индуктора; Втах —
максимальная магнитная индукция в рабочем воздушном зазоре.
Таким образом, по заданным мощности и моменту вращения рабочего механизма можно вычислить необходимую мощность электродвигателя и максимальный момент, передаваемый ЭММ.
Качество исполнительных механизмов ЭММ определяется показателями:
максимальным ускорением

(4.27)
где I — момент инерции ведомых частей муфт;
максимальной скоростью нарастания (крутизна) мощности на выходе KN

(4.28) коэффициентом усиления по мощности

(4.29)
где Nmax — максимальная мощность, передаваемая ЭММ; Ny — мощность управления;
КПД

(4.30)
где NДВ. С — мощность, потребляемая из сети; электромеханической постоянной
(4.31)
4.4. ТИПОВЫЕ СХЕМЫ РАЗОМКНУТЫХ СИСТЕМ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯМИ
Для управления асинхронными электродвигателями используются релейно-контакторные аппараты, которые реализуют типовые схемы пуска, реверса, торможения, остановки электропривода.
На базе типовых схем релейно-контакторного управления разрабатываются схемы управления электроприводами производственных механизмов, агрегатов. Пуск асинхронных двигателей с короткозамкнутым ротором небольшой мощности осуществляется обычно при помощи магнитных пускателей. В данном случае магнитный пускатель состоит из контактора переменного тока и двух встроенных в него электротепловых реле.
Простейшая схема управления асинхронным электродвигателем с короткозамкнутым ротором. Схема (рис. 4.9) использует питание силовых цепей и цепей управления от источника

Рис. 4.9. Схема управления асинхронным электродвигателем с коротко-замкнутым ротором
одного и того же напряжения. Для повышения надежности работы релейных контакторных аппаратов, большей частью рассчитанных на низкое напряжение, и для повышения безопасности эксплуатации применяются схемы с питанием цепей управления от источника пониженного напряжения.
Если выключатель (рубильник) S1 включен, то для пуска электродвигателя необходимо нажать кнопку S2 — «пуск». При этом катушка контактора КШ получит питание, замкнутся главные контакты К1 (1 — 3) Μ в силовой цепи и статор двигателя присоединится к сети. Электродвигатель начинает вращаться. Одновременно в цепи управления закроется замыкающий вспомогательный контакт К1А, шунтирующий кнопку S2 — «пуск», после чего эту кнопку не нужно удерживать в нажатом состоянии, так как цепь катушки контактора К1M остается замкнутой. Кнопка S2 с самовозвратом и за счет действия пружины возвращается в исходное разомкнутое состояние.
Для отключения электродвигателя от сети нажимается кнопка S3 — «стоп». Катушка контактора К1М обесточивается и замыкающие контакты К1 (1 — 3) Μ отключают обмотки статора от сети. Одновременно размыкается вспомогательный контакт К1А. Схема приходит в исходное, нормальное состояние. Вращение электродвигателя прекращается.
Схема предусматривает защиту двигателя и цепи управления от коротких замыканий плавкими предохранителями F1(1 — 3), защиту от перегрузки двигателя двумя электротепловыми реле F2(1 — 2). Пружинный привод контактов магнитного пускателя К1(1 — 3)М, К1А на размыкание реализует так называемую нулевую защиту, которая при исчезновении или значительном снижении напряжения отключают двигатель отсети. После восстановления нормального напряжения самопроизвольного пуска двигателя не произойдет.
Более четкая защита от снижения или исчезновения напряжения может быть выполнена при помощи реле пониженного напряжения, катушка которого присоединяется к двум фазам силовой цепи, а его замыкающий контакт включен последовательно с катушкой контактора. В этих схемах вместо установки на вводе рубильников с предохранителями применяют воздушные автоматы.
Схема управления асинхронным электродвигателем с корот-козамкнутым ротором с использованием магнитного пускателя и воздушного автоматического выключателя (рис. 4.10). Автоматический выключатель F1 исключает возможность обрыва одной фазы от срабатывания защиты при однофазном коротком замыкании, как это бывает при установке предохранителей. Нет необходимости заменять элементы в предохранителях при сгорании их плавкой вставки.
В схемах управления электродвигателями применяются автоматы с электромагнитными расцепителями либо с расцепите-лями электромагнитным и электротепловым. Расцепители электромагнитного типа характеризуются нерегулярной отсечкой, равной десятикратному току, и служат для защиты от токов короткого замыкания. Электротепловые расцепители обладают об-ратнозависимой характеристикой времени от тока. Так расце-питель с номинальным током 50 А срабатывает при 1,5-кратной нагрузке через 1 ч, а при 4-кратной — через 20 с. Электротепловые расцепители не защищают двигатель от перегрева при перегрузках на 20...30 %, но могут защитить двигатель и силовую цепь от перегрева пусковым током при застопоривании приводного механизма. Поэтому для защиты электродвигателей от длительных перегрузок при использовании автомата с электротепловым расцепителем такого типа применяются дополнительные электротепловые реле, как и при использовании автоматического выключателя с электромагнитным расцепителем. Мно-
гие выключатели, например АП-50, защищают электродвигатель одновременно от токов короткого замыкания и от перегрузок. Принципы действия схем (см. рис. 4.9, 4.10) для пуска и останова аналогичны. Эти схемы нашли широкое применение для управления нереверсивными электроприводами транспортеров, воздуходувок, вентиляторов, насосов, лесообрабатывающих и заточных станков.
Схемы управления асинхронным двигателем с короткозамк- нутым ротором с реверсивным пускателем. Эта схема (рис. 4.11) применяется в случаях, когда необходимо изменять направле-

Рис. 4.10. Схема управления асинхронным электродвигателем с использованием воздушного автоматического выключателя
ния вращения электропривода. Например, в приводе электролебедок, рольгангов, механизмов подачи станков и т. п. Управление двигателями осуществляется реверсивным магнитным пускателем. Включение двигателя для вращения «вперед» осуществляется нажатием кнопки S1. Катушка контактора К1М будет под напряжением, и замыкающие главные контакты К1(1 — 3)М присоединят электродвигатель к сети. Для переключения электродвигателя на противоположное направление вращения необходимо нажать кнопку S3 «стоп», а затем кнопку S2 «назад», что вызывает отключение контактора К1М и включение контактора К2М. При этом, как видно из схемы, две фазы на статоре переключатся, т. е. происходит реверс вращения электродвигателя. Во избежание короткого замыкания в цепи статора между первой и третьей фазой вследствие ошибочного одновременного нажатия на обе пусковые кнопки S1 и S2 реверсивные магнитные пускатели имеют рычажную механическую блокировку (на схеме не показана), которая препятствует
втягиванию одного контактора, если включен другой. Для повышения надежности, кроме механической блокировки, в схеме предусмотрена электрическая блокировка при помощи размыкающих вспомогательных контактов К1A.2 и К2А.2. Обычно реверсивный пускатель состоит из двух контакторов, заключенных в один корпус.
В практике применяется также схема реверса асинхронных короткозамкнутых электродвигателей с использованием двух отдельных нереверсивных магнитных пускателей. Но для устранения возможности короткого замыкания между первой и третьей

Рис. 4.11. Схема управления асинхронным электродвигателем с реверсивным пускателем
фазой силовой цепи от одновременного включения обоих пускателей применяют двухцепные кнопки. Например, при нажатии кнопки S1 «вперед» цепь катушки контактора К1M замыкается, а цепь катушки К2М при этом дополнительно размыкается. (Принцип действия двухцепных кнопок показан на следующей схеме рис. 4.12). Реверс электродвигателей постоянного тока осуществляется изменением полярности напряжения силовой цепи.
Схема управления двухскоростным асинхронным электродвигателем с короткозамкнутым ротором приведена на рис. 4.12. Привод может иметь две скорости. Пониженная скорость получается при соединении обмоток статора на треугольник, что осуществляется нажатием двухцепной кнопки S3 и включением контактора КЗ сзамыканием трех силовых контактов КЗ. Одновременно замыкается вспомогательный контакт КЗ А, шунтирующий кнопку S3, и размыкается КЗА — вспомогательный контакт в цепи катушки К4.
Повышенная скорость получается при соединении обмоток на двойную звезду, что реализуется нажатием двухцепной кнопки S4. При этом катушка контактора КЗ обесточивается, контакты КЗ в силовой цепи размыкаются, размыкается вспомогательный контакт КЗА, шунтирующий кнопки S3, и замыкается вспомогательный контакт КЗА в цепи катушки К4.
При дальнейшем нажатии (перемещении) кнопки S4 замыкается цепь катушки контактора К4, замкнутся пять контактов К4 в силовой цепи, обмотка статора будет подключена на двойную звезду. Одновременно замкнется вспомогательный контакт

Рис. 4.12. Схема управления двухскорост-
ным асинхронным электродвигателем с ко-
роткозамкнутым ротором
Κ4A, шунтирующий кнопки S4 и разомкнётся вспомогательный контакт К4А в цепи катушки контактора КЗ. Обычно контакторы переменного тока имеют три силовых контакта, а в схеме подключения статора на двойную звезду показано пять силовых контактов К4. В этом случае параллельно катушке контактора К4 включается катушка дополнительного контактора.
После предварительного соединения обмоток статора производится пуск двигателя при помощи контакторов К1 или К2 для вращения «вперед» или «назад». Включение контакторов К1 или К2 осуществляется соответственно нажатием кнопки S1 или S2. Применение двухцепных кнопок позволяет осуществить дополнительную электрическую блокировку, исключающую одновременное включение контакторов К1 и К2, а также КЗ и К4.
В схеме предусмотрена возможность переключения с одной скорости на другую при вращении электродвигателя «вперед» или «назад» без нажатия кнопки S5 «стоп». При нажатии кнопки
S5 «стоп» катушки включенных контакторов обесточиваются и схема приходит в исходное, нормальное состояние.
Рассмотренная схема является основой построения схем управления электродвигателями двухскоростных транспортеров подачи раскряжевочных агрегатов, сортировочных конвейеров и т. п.
Рассмотрим вопросы торможения электродвигателей. При отключении обмоток статора от сети ротор электродвигателя с рабочим механизмом, например дисковой пилой шпалорезногс станка, продолжает сравнительно долгое время вращаться по инерции. Для устранения этого явления в приводах с асинхронными электродвигателями в зависимости от их мощности и назначения применяется торможение противовключением, фрикционное торможение и динамическое торможение.
Схема управления асинхронным электродвигателем с корот-козамкнутым ротором с использованием торможения противовключением (рис. 4.13). В схемах торможения противовключением используется реле контроля скорости (РКС) ЕМ, механически связанное с валом двигателя; его замыкающий контакт ЕА при определенной угловой скорости двигателя закрывается. При неподвижном роторе двигателя и при скорости вращения менее 10... 15 % от номинальной контакт реле ΕА разомкнут, Нажатием кнопки S1 включается контактор К1М, замыкаются силовые контакты К1(1 — 3)М и двигатель пускается в ход, замыкается вспомогательный контакт К1А.1, шунтирующий кнопку S1. Размыкающий вспомогательный контакт К1А.2 одновременно разрывает цепь питания катушки контактора К2М, а несколько позднее с увеличением скорости вращения двигателя замкнется контакт реле скорости ЕА. Поэтому контактор К2М в этот период не включается.
Отключение электродвигателя от сети с торможением противовключением производится нажатием кнопки S2 — «стоп». Прк этом катушка контактора К1М обесточивается, размыкаются силовые контакты К1(1 — 3)М, размыкается шунтирующий пусковую кнопку S1 вспомогательный контакт К1А.1. Одновременно замыкается размыкающий вспомогательный контакт К1А.2 При этом двигатель вращается по инерции и контакт реле ЕА замкнут, следовательно катушка контактора К2А получит питание, замкнутся главные контакты К2(1 — 3)М, разомкнётся вспомогательный контакт К2А в цепи катушки К1М. Обмотка статора будут подключены к сети на реверс вращения ротора Ротор мгновенно затормаживается и при скорости вращения близкой к нулю контакт реле скорости ЕА размыкается, катушка контактора К2М обесточивается, главные контакты К2(1 — 3)М размыкаются, замкнется вспомогательный контакт К2А. Двигатель остановлен и отключен от сети. Схема будет в исходном положении.

Рис. 4.13. Схема управления асинхронным электродвигателем с ко-роткозамкнутым ротором с использованием торможения противо-
включением

Рис. 4.14. Схема фрикционного торможения асинхронного электродвигателя грузоподъемного механизма
Рассмотренная типовая схема торможения противовключе-нием является основой построения схем управления электродвигателями станков для заточки цепных, круглых, рамных пил, в схемах обрезных станков и др. Торможение противовключе-нием обеспечивает жесткий, мгновенный останов привода и применяется обычно для электродвигателей небольшой мощности.
Схема фрикционного торможения асинхронного электродвигателя грузоподъемного механизма (рис. 4.14). В соответствии с правилами технической эксплуатации грузоподъемных механизмов в отключенном состоянии привод и механизм подъема должны быть надежно заторможены.
На упрощенной схеме условно показан односторонний колодочный тормоз Τ с пружинным приводом зажима тормозного шкива.
При пуске электродвигателя нажимается кнопка S1 «пуск», катушка контактора КШ будет под напряжением, замкнутся три контакта К1(1 — 3)М в силовой цепи и вспомогательный контакт К1Л. Статор электродвигателя и обмотка электромагнита У одновременно будут присоединены к сети. Электромагнит У отведет колодочный тормоз от шкива и создаст деформацию пружины. Двигатель вращается расторможенным.
Нажатием кнопки S2 «стоп» обесточивается катушка контактора КШ, размыкаются главные контакты в силовой цепи К1(1—3)М и вспомогательный контакт К1А. Статор электродвигателя и обмотка электромагнита У отключаются от сети, колодочный тормоз спружинным приводом жестко фиксирует ротор электродвигателя с механизмом подъема. Нетрудно видеть, что применение реверсивного магнитного пускателя дает возможность получить схему фрикционного торможения электропривода механизма и на подъем, и на опускание груза.
Схема фрикционного торможения асинхронного электродвигателя станочного оборудовнаия. Упрощенная схема (рис. 4.15) показывает, что в нормальном (отключенном) состоянии ротор электродвигателя расторможен под действием пружинного привода. Это позволяет проводить смену инструмента, наладку станка с легким поворотом приводного вала и ротора электродвигателя.
Электродвигатель подключается к сети при помощи кнопки S1, контакта К1А и силовых контакторов К1(1—3)М. Остановка электропривода станка производится нажатием двухцеп-ной кнопки S2 «стоп». При этом катушка контактора КШ обесточивается, размыкаются главные контакты в силовой цепи К1(1—3)М и вспомогательный контакт К1А. Электродвигатель отключается от сети, продолжая вращаться по инерции.
При дальнейшем нажатии на кнопку S2 замыкается цепь катушки контактора К2М, замыкаются контакты К2(1—2)М, электромагнит У затягивает колодочный тормоз. Кнопка S2 осво-


Рис. 4.15. Схема фрикционного торможения асинхронного электродвигателя
станочного оборудования
Рис. 4.16. Схема управления асинхронным двигателем с использованием динамического торможения
бождается и приходит в исходное положение, контактор К2М обесточивается, контакты К2(1 — 2)М размыкаются. Статор двигателя и электромагнит отключены от сети, привод остановлен и расторможен. Эта простейшая схема является базой разработки схем фрикционного торможения электродвигателей станочного оборудования, где учитывается необходимость реверса, защитных ограждений, сигнализации.
Схема управления асинхронным двигателем с использованием динамического торможения (рис. 4.16). Динамическое торможение, в отличие от торможения противовключением и фрикционного метода является плавным, мягким торможением. Включение электродвигателя в сеть осуществляется при нажатии кнопки S1 — «пуск». Контактор К1М будет включен, замкнутся три главных контакта К1(1 — 3)М в силовой цепи, замкнется вспомогательный контакт К1А.1, разомкнётся К1А.2, замкнется К1А.З, после чего включится реле времени Д1М и замкнет свой контакт РДТ в цепи катушки контактора К2М, которую несколько раньше разомкнул контакт К1А.2.
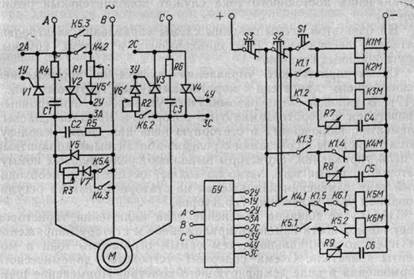
Рис. 4.17. Схема тиристорного управления пуском и торможением асинхронного двигателя с короткозамкнутым ротором
Отключение статора электродвигателя от сети переменного тока и торможение осуществляется нажатием кнопки S2 «стоп». Контактор К1М теряет питание, главные контакты К1(1—3)М размыкаются, размыкаются вспомогательные контакты К1А.1, К1А.З и замыкается К1А.2. Катушка реле времени Д1М теряет питание, однако замыкающий контакт РДТ, будучи ранее замкнутым, разомкнётся с выдержкой времени, которая несколько превышает длительность торможения двигателя. При замыкании контакта К1А. 2 катушка контактора К2М получит питание, разомкнётся вспомогательный контакт блокировки К.2А и замкнутся контакты К2(1—2)М. В обмотку статора подается постоянный ток. Обмотка создает неподвижный в пространстве магнитный поток. Во вращающемся по инерции роторе индуцируются ЭДС. Взаимодействие токов ротора, вызванных этими ЭДС, с неподвижным магнитным потоком создает тормозной момент двигателя

где Мн — номинальный момент двигателя; пс — синхронная скорость двигателя; I р' — приведенный к статору ток ротора; R p'— полное активное сопротивление ротора, приведенное к статору; n Д= n/n C — относительная скорость двигателя.
После размыкания контакта реле времени РДТ схема приходит в исходное состояние, двигатель плавно остановлен. Для ограничения постоянного тока служит дополнительный резистор RT.
На базе этой схемы созданы схемы управления электродвигателями лесопильных рам, шпалорезных и других крупных круглопильных станков.
Схема тиристорного управления пуском и торможением асинхронного двигателя с короткозамкнутым ротором (рис. 4.17). В типовой схеме разомкнутого управления асинхронным двигателем с короткозамкнутым ротором в качестве силовых элементов, включенных в статорную цепь двигателя, используются тиристоры в сочетании с релейно-контактными аппаратами в цепи управления. Тиристоры выполняют роль силовых коммутаторов и, кроме того, легко позволяют осуществить необходимый темп изменения напряжения на статоре двигателя регулированием угла включения тиристоров.
При пуске плавное изменение угла включения тиристоров дает возможность изменять приложенное к статору напряжение от нуля до номинального, тем самым ограничить токи и моменты двигателя. Схема содержит устройство динамического торможения в виде демпфирующего контура. Применение шунтирующего тиристора, замыкающего цепь тока между двумя фазами, приводит к увеличению постоянной составляющей тока,
что создает достаточный тормозной момент в области высокой угловой скорости.
Рассмотрим типовую схему комплектного устройства, состоящего в силовой части из группы включенных встречно-параллельно тиристоров V1....V4 в фазах А и С и одного коротко-замкнутого тиристора между фазами А и В — V5, для управления асинхронным двигателем М. Схема включает блок управления тиристорами БУ и релейно-контактный узел управления.
Нажатием кнопки S1 включается реле К1М и К2М, на управляющие электроды тиристоров V1... V4 подаются импульсы, сдвинутые на 60° относительно питающего напряжения. К обмоткам статора двигателя подается пониженное напряжение, уменьшаются пусковой ток и пусковой момент. Ротор двигателя увеличивает скорость вращения, разгоняется. Размыкающий контакт реле К1.2 отключает реле КЗМ с задержкой времени, зависящей от параметров резистора R7 и конденсатора С4. Размыкающими контактами реле КЗМ шунтируются соответствующие резисторы в блоке управления тиристорами БУ, и к статору прикладывается полное напряжение сети.
Для остановки двигателя нажимается кнопка S3, обесточивается релейная схема управления, тиристоры V1... V4, и напряжение со статора двигателя снимается. При этом за счет энергии, запасенной конденсатором С5, включается на время торможения реле К4М, которое своими контактами К4.2 и К4.3 включает тиристоры V2 и V5. По фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления, что обеспечивает эффективное динамическое торможение.
Сила тока, а, следовательно, и время динамического торможения регулируются резисторами R1 и R3. Эта схема также имеет шаговый режим. При нажатии кнопки S2 включается реле К5М, которое своими контактами К5.3 и К5.4 включает тиристоры V2 и V5. В этом случае по фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления. При отпускании кнопки S2 выключается реле К5М и тиристоры V2 и V5, при этом на короткое время за счет энергии, запасенной в конденсаторе С6, включается реле, которое своим контактом К6.2 включает тиристор V3, и ротор двигателя поворачивается на некоторый угол вследствие поворота примерно на такой же угол результирующего вектора потока статора.
Величина шага поворота зависит от напряжения сети, момента статической нагрузки, момента инерции привода и среднего значения выпрямленного тока. Реализация шагового режима работы двигателя проводится после его остановки, так как реле К5М первоначально можно включить только после замыкания размыкающих контактов К1.5, К4.1. Шаговый режим работы двигателя создает благоприятные условия наладки.
Схема управления асинхронными электродвигателями с фазным ротором и функции времени (рис. 4.18). Защита силовых цепей двигателя от токов короткого замыкания выполняется с помощью реле максимального тока F1, F2, F3; защита от перегрузок электротепловыми реле F4(1—2), нагревательные элементы которых включены через трансформаторы тока ТТ1, ТТ2. Цепи управления защищаются автоматическим выключателем F5, имеющим максимальную токовую защиту.
При включении рубильника S1 и автоматического выключателя F5 получит питание реле времени Д1М и замыкающие кон-

Рис. 4.18. Схема управления асинхронным электродвигателем с фазным ротором в функции времени
такты его Д1А.1. Д1А.2 закроются, тем самым подготавливается цепь включения реле времени Д2М и контактора К1М. Размыкающий контакт Д1А.З разомкнётся и выключит цепь катушек контакторов ускорения К2М, КЗМ, К4М.
При последующем нажатии кнопки S2 «пуск», через замкнувшийся ранее контакт Д1Л.2 включится контактор К1М, замкнутся главные контакты К1(1—3)М в силовой цепи, в обмотку статора двигателя Μ будет подано напряжение. В обмотку ротора при этом включены все пусковые резисторы. Начинается пуск двигателя на первой реостатной характеристике. Одновременно закроется вспомогательный контакт К1А.З, шун-
тирующий пусковую кнопку, и замкнется контакт К1А.2, через который подается питание в цепь катушек реле времени Д2М, ДЗМ. Размыкающий вспомогательный контакт К1А.1 отключит цепь реле Д1М, которое отпускает якорь с выдержкой времени при отключении его катушки. Поэтому Д2М не сразу включится и его размыкающий контакт Д2А.1 будет открыт.
Следует отметить, что размыкающий контакт Д1А.З остается еще открытым; по истечении времени выдержки реле Д1М его замыкающий контакт Д1А.1 (а также Д1А.2) откроется, а размыкающий Д1А.З — закроется. В результате этих переключений в схеме управления включается контактор К2М и будет шунтирована первая пусковая ступень резистора — двигатель с первой реостатной характеристики перейдет на вторую, разгоняясь до большей угловой скорости. Кроме того, выключится реле времени Д2М и его размыкающий контакт с выдержкой времени Д2А.1 замкнет цепь катушки контактора КЗМ, который сработает и замкнет свои контакты К3(1 — 2)М, т. е. шунтируется вторая пусковая ступень резистора — двигатель переходит на третью реостатную характеристику.
Наконец, после размыкания с выдержкой времени замыкающего контакта Д2А.1 выключится реле ДЗМ — с выдержкой времени, на которое настроено реле ДЗМ (соответственно времени пуска двигателя на последней реостатной характеристике), замкнется его контакт ДЗА.1, и включится контактор К4М и замкнет свои контакты К4(1 — 3)М. Обмотка ротора будет замкнута накоротко и двигатель будет заканчивать свой разгон в соответствии с его естественной характеристикой. Этим и заканчивается ступенчатый пуск асинхронного двигателя, контролируемый в функции времени электромагнитными реле времени Д1М, Д2М, ДЗМ.
Останов двигателя производится нажатием кнопки S3. Схема используется для привода механизмов, не требующих реверса, длительность торможения которых после отключения двигателя не имеет существенного значения. В частности, на базе этой схемы создаются схемы управления главным электродвигателем лесопильных рам.
Дата добавления: 2015-08-27; просмотров: 833 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ЭЛЕКТРОДВИГАТЕЛИ КАК ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ АВТОМАТИЧЕСКИХ СИСТЕМ | | | ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ С ЛИНЕЙНЫМ ПЕРЕМЕЩЕНИЕМ РЕГУЛИРУЮЩЕГО ОРГАНА |