Читайте также:
|
Устройство фазовой автоподстройки частоты (ФАПЧ) (рис. 3.24) состоит из временного детектора (ВД), схемы управления (СУ) и генератора, управляемого напряжением (ГУН).
В СУ выделяется постоянная составляющая сигнала с выхода ВД. Спектр этого сигнала содержит постоянную составляющую, соответствующую случаю идеального усреднения, сумму гармонических колебаний, обусловленных наличием разности частот записи и считывания в тракте передачи блока асинхронного сопряжения, и сложное колебание, обусловленное наличием времени ожидания. Подавление двух последних составляющих спектра сигнала на выходе ВД обеспечивает идеальное восстановление первоначальной скорости цифрового потока. Для этого в СУ необходимо использовать фильтр нижних частот (ФНЧ) с бесконечно малой полосой пропускания. Однако при этом не обеспечивается необходимая полоса захвата устройства ФАПЧ, которая не может быть меньше максимального расхождения частоты записи в передающем устройстве ƒз.пер и частоты считывания в приемном устройстве ƒсч.пр, т. е.

где  - полоса пропускания ФНЧ. В аппаратуре формирования, например, потока Е2 𝜟ƒз.пер= 𝜟ƒсч.пр = 60 Гц, следовательно 𝜟FФНЧ = 120 Гц.
- полоса пропускания ФНЧ. В аппаратуре формирования, например, потока Е2 𝜟ƒз.пер= 𝜟ƒсч.пр = 60 Гц, следовательно 𝜟FФНЧ = 120 Гц.
Составляющие сигнала с выхода ВД, попадающие в полосу частот 𝜟FФНЧ, проходят на вход ГУН, что приводит к временным флуктуациям передаваемого цифрового потока. Системы с односторонним согласованием скоростей характеризуются большими значениями частоты согласования скоростей ƒс. Поэтому составляющие, обусловленные наличием разности частот записи и считывания, являются достаточно высокочастотными и могут быть подавлены ФНЧ, а составляющие, обусловленные наличием времени ожидания, при определенных условиях могут быть сколь угодно низкочастотными из-за большого значения отношения частоты ƒс и частоты команд согласования скоростей ƒск, а следовательно достаточно существенными.
Системы с двусторонним согласованием скоростей характеризуются малыми значениями ƒс. Поэтому составляющие, обусловленные наличием разности частот записи и считывания, оказываются достаточно низкочастотными и не могут быть подавлены ФНЧ, в то время как составляющие, обусловленные наличием времени ожидания, из-за малого отношения частоты ƒс и частоты команд согласования скоростей ƒск оказываются незначительными.
Таким образом, в системах с односторонним согласованием скоростей основным источником низкочастотных составляющих управляющего сигнала (а следовательно и флуктуации сигнала на выходе оборудования сопряжения) является время ожидания, а в системах с двусторонним согласованием - разность частот записи и считывания. При использовании в цепи управления ГУН простого ФНЧ временные флуктуации на выходе оборудования формирования потока Е2, например, могут достигать периода тактовой частоты.
Известен способ уменьшения временных флуктуации, основанный на компенсации низкочастотных составляющих в сигнале на выходе ГУН. Этот способ заключается в том, что из последовательностей импульсов, соответствующих моментам согласования скоростей, на выходе ГУН формируется компенсирующий сигнал, содержащий те же низкочастотные составляющие, что и сигнал на выходе ВД в передающем устройстве, но противоположной фазы. Компенсирующий сигнал формируется с помощью интегратора и инвертора (рис. 3.24). На выходе интегратора в спектре

Рис. 3.24. Устройство ФАПЧ с компенсацией высокочастотных составляющих управляющего сигнала
компенсирующего сигнала будет содержаться постоянная составляющая, равная составляющей сигнала управления на выходе ВД. Тогда на выходе сумматора будут подавляться не только низкочастотные составляющие сигнала с выхода ВД, но и постоянная составляющая этого сигнала, что недопустимо.
Постоянная составляющая в спектре компенсирующего сигнала подавляется с помощью разделительной цепи, включенной на входе интегратора. Ширина полосы подавления 𝜟Fп определяет границу частот в спектре сигнала на выходе ВД, ниже которой компенсация не производится. Выбрать 𝜟Fп сколь угодно малой нельзя, поскольку при этом из сигнала управления будут вычитаться и высокочастотные составляющие, определяемые нестабильностями частот записи в передающем и приемном устройствах. Следовательно, необходимо, чтобы 𝜟Fп> 𝜟ƒз.пер+𝜟ƒсч.пр.
Существенного уменьшения временных флуктуации во всем диапазоне частот можно достигнуть путем передачи в приемное устройство информации об изменении временных интервалов (ВИ) между моментами записи и считывания на величину, значительно меньшую периода считывания. Для этого в передающем устройстве используется дополнительный временной детектор (ВД), формирующий сигналы о промежуточных значениях ВИ между моментами записи и считывания, соответствующих изменению этого интервала 𝜟Tпр на величину, значительно меньшую периода считывания Tсч. В приемном устройстве в соответствии с данной информацией в цепи передачи сигнала записи вводится или выводится (в зависимости от знака изменения ВИ) задержка, равная 𝜟Tпр. В результате ВИ между последовательностями записи и считывания в приемном устройстве не превосходят 𝜟Tпр, что приводит к соответствующему уменьшению временных флуктуации передаваемого сигнала.
Структурная схема временного детектора, реализующего промежуточную фиксацию значений ВИ, приведена на рис. 3.25.
Этот детектор включает в себя детектор моментов согласования скорос-
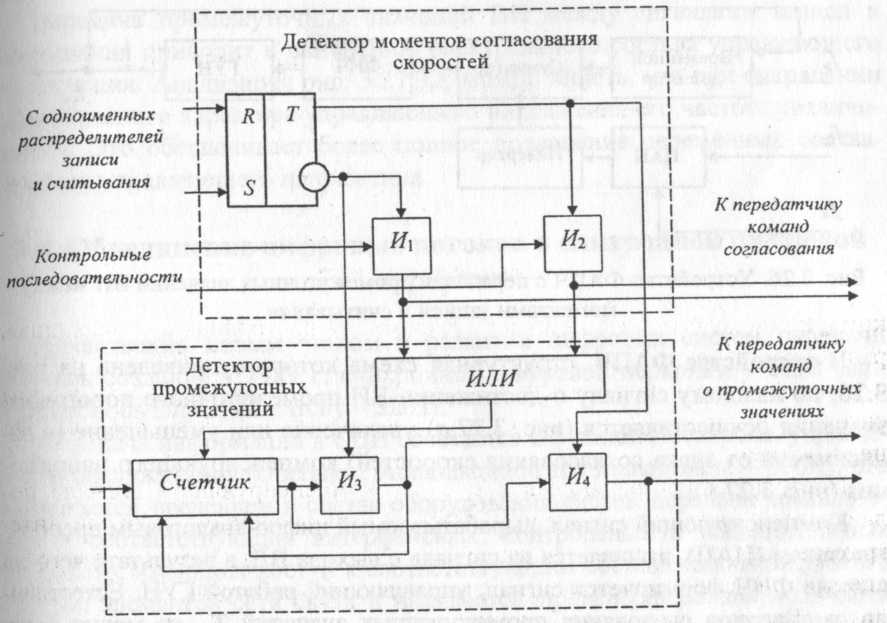
Рис. 3.25. Временной детектор с фиксацией промежуточных значений ВИ между моментами записи и считывания
тей, аналогичный изображенному на рис. 3.18, и детектор промежуточных значений ВИ между сигналами записи и считывания, состоящий из счетчика импульсов и логических элементов ИЛИ, И3 и И4.
Каждый сигнал согласования скоростей через элемент ИЛИ устанавливает счетчик в исходное состояние, при котором сигнал на выходе счетчика соответствует 32-й позиции цикла. При этом ВИ между последовательностями записи и считывания равен периоду считывания Tсч, и на выходах логических элементов И3 и И4 вырабатывается нулевой сигнал. При изменении ВИ (в сторону увеличения или уменьшения) на величину 0,125Tсч на выходе соответствующего логического элемента (И3 или И4) вырабатывается сигнал, свидетельствующий о достижении ВИ первого промежуточного значения (Tсч ±𝜟Tсч) и сдвигающий в соответствующую сторону временное положение сигнала с выхода счетчика импульсов. В результате сигнал с выхода счетчика импульсов будет сфазирован либо с 36-й позицией цикла, либо с 28-й позицией до тех пор, пока ВИ между последовательностями записи и считывания не достигнет величины (Tсч ± 2𝜟Tсч), после чего производится фазирование счетчика с 40-й или с 24-й позицией цикла и т. д.
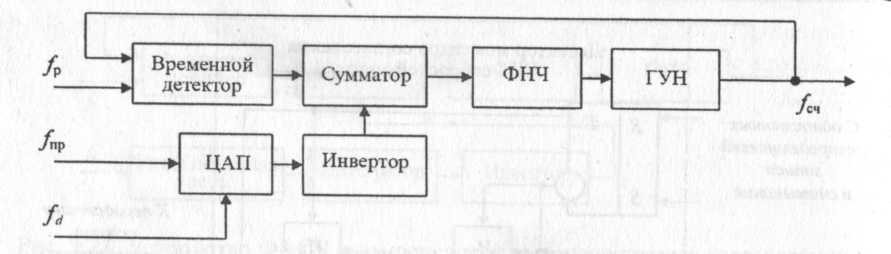
Рис. 3.26. Устройство ФАПЧ с передачей промежуточных значений ВИ между моментами записи и считывания
В устройстве ФАПЧ, структурная схема которого приведена на (рис. 3.26), по каждому сигналу о достижении ВИ промежуточного порогового значения осуществляется (рис. 3.27) увеличение или уменьшение (в зависимости от знака согласования скоростей) компенсирующего напряжения (рис. 3.27, б).
Компенсирующий сигнал, вырабатываемый цифро-аналоговым преобразователем (ЦАП), вычитается из сигнала с выхода ВД, в результате чего на выходе ФНЧ формируется сигнал, управляющий работой ГУН. Естественно, что период следования промежуточных значений Tпр не может быть меньше максимального изменения ВИ между сигналами записи и считывания за период передачи команд о достижении промежуточных значений Тпр.

Рис. 3.27. Временные диаграммы сигналов в устройстве ФАПЧ с передачей промежуточных значений: а - сигнал о промежуточных значениях временного сдвига; б - вспомогательный сигнал; в - сигнал на выходе ВД; г - сигнал, управляющий работой ГУН
Передача промежуточных значений ВИ между сигналами записи и считывания приводит к изменению спектрального состава управляющего напряжения. Анализируя рис. 3.27, в, г, можно видеть, что при сохранении пилообразного характера управляющего напряжения его частота увеличивается. Это обеспечивает более полное подавление переменных составляющих управляющего напряжения.
Дата добавления: 2015-08-26; просмотров: 85 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Передатчик и приемник команд согласования скоростей | | | Объединение цифровых потоков в синхронной цифровой иерархии |