|
Читайте также: |
Концепция гиперустойчивости системы, на которой основан алгоритм БИХ – адаптивной фильтрации, была разработана Поповым [258]; она приводит к обобщенному описанию устойчивости выходного сигнала для систем с переменными параметрами и нелинейных систем. Вначале этот анализ применялся в работах по теории управления. Например, он был использован для идентификации выходной ошибки посредством моделирования структуры эталонной адаптивной системы [182]. В данном разделе формулируется теорема гиперустойчивости и дается эвристическое описание ее условий и следствий. Кроме того, показана ее взаимосвязь с алгоритмами адаптивной фильтрации.
Гиперустойчивость для случая дискретного времени определяется следующим образом [15]. Пусть  - рациональная скалярная передаточная функция для линейной инвариантной по времени системы, управляемой сигналом
- рациональная скалярная передаточная функция для линейной инвариантной по времени системы, управляемой сигналом  и создающей на выходе отклик
и создающей на выходе отклик  . Говорят, что система гиперустойчива, если ее вектор состояния остается ограниченным во времени для всех управляющих последовательностей , удовлетворяющих вместе с выходным сигналом выражению:
. Говорят, что система гиперустойчива, если ее вектор состояния остается ограниченным во времени для всех управляющих последовательностей , удовлетворяющих вместе с выходным сигналом выражению:
 (4. 2 7)
(4. 2 7)
В данном обсуждении мы будем иметь дело с более строгим вариантом этого определения, который грубо можно назвать асимптотической гиперустойчивостью и который требует, чтобы вектор состояния уменьшался до нуля при том же классе входных последовательностей; под термином гиперустойчивости в данном разделе, на самом деле, подразумевается это последнее определение. Отметим, что если имеет соответствующую рациональную форму, то выходной сигнал также будет уменьшаться до нуля. Теорема гиперустойчивости [258] имеет простую формулировку. Вышеописанная система является гиперустойчивой тогда и только тогда, когда ее передаточная функция - строго положительная действительная (СПД) величина [143], т. е.
 (4.28)
(4.28)
Другими словами, СПД – система будет иметь ограниченный выходной сигнал, если она управляется любым входным сигналом (включая некоторые дивергентные последовательности, удовлетворяющие выражению (4.27)).
Теорема гиперустойчивости имеет интересную интерпретацию в отношении пассивной системы [15. 182]. Сходный физический пример возникает в теории цепей для систем с непрерывным временем. Хорошо известно, что импеданс точки управления пассивной цепи  является СПД – величиной и связывает управляющий ток с напряжением, возникающем на входе цепи.
является СПД – величиной и связывает управляющий ток с напряжением, возникающем на входе цепи.
Рассмотрим установившееся состояние, когда каждая установившаяся переменная соответствует составляющей накопленной энергии. Для любого тока, при котором поступающая в цепь энергия ограничена, т. е.
 (4.29)
(4.29)
накапливаемая внутри энергия должна рассеяться [т. е.  ]. По аналогии, в математическом смысле, любая система, если она является СПД – системой, может считаться диссипативной.
]. По аналогии, в математическом смысле, любая система, если она является СПД – системой, может считаться диссипативной.
Для адаптивной фильтрации гиперустойчивость системы становится полезной именно в случае конфигурации, имеющей замкнутый контур; для такой конфигурации можно переформулировать параметрическую адаптацию цифровых фильтров [182]. Пусть - нелинейная последовательность, управляемая нелинейной функцией выходного сигнала с изменяющимися во времени параметрами, и обозначенная на рис. 4.5 а, как обобщенный элемент обратной связи  .
.

Рис. 4.5. Неуправляемая система с замкнутым контуром: обобщенный элемент обратной связи (а); линейный элемент обратной связи (б). (Из работы [185].)
Если бы эта обратная связь  была линейной (см. рис. 4.5, б), ограниченная по входу и ограниченная по выходу (ОВОВ), устойчивость легко проверялась бы в частотной области по расположению нулей выражения.
была линейной (см. рис. 4.5, б), ограниченная по входу и ограниченная по выходу (ОВОВ), устойчивость легко проверялась бы в частотной области по расположению нулей выражения.
 (4.30)
(4.30)
Нуль, лежащий вне единичного круга, предполагает неустойчивость. Разумеется, согласно физической интерпретации, требуется, чтобы при любой частоте усиление контура никогда не было равно -1 (т. е. не давало сдвига по фазе на  ). Достаточным, но не необходимым условием было бы такое ограничение функций и , при котором каждая из них, на всех частотах давала бы вклад менее
). Достаточным, но не необходимым условием было бы такое ограничение функций и , при котором каждая из них, на всех частотах давала бы вклад менее  . Тем самым, если обе они являются СПД – функциями, то устойчивость замкнутого контура гарантируется.
. Тем самым, если обе они являются СПД – функциями, то устойчивость замкнутого контура гарантируется.
Тем не менее, такое условие бесполезно при анализе случаев нелинейной обратной связи с меняющимися во времени параметрами. Вместо этого, условие устойчивости следует сформулировать для поведения  во временной области. Из рис. 4.5 а видно, что элемент обратной связи управляется сигналом
во временной области. Из рис. 4.5 а видно, что элемент обратной связи управляется сигналом  и имеет на выходе сигнал
и имеет на выходе сигнал  .
.
Тогда, если
 (4.31)
(4.31)
то отсюда
 (4.32)
(4.32)
Следовательно, если - СПД – функция, то замкнутый контур будет гиперустойчивым. Исходя из этого, можно обобщить концепцию положительного вещественного числа на случай нелинейного изменяющегося во времени элемента обратной связи . Анализируя собственные функции, можно показать, что для линейных элементов данное условие действительно обеспечивает такую величину фазового отклика, которая не превышает на всех частотах. Если энергия, поступающая в элемент обратной связи
,

ограничена снизу, как в (4.31), то на основании физических представлений можно сказать, что элемент представляет собой диссипативную обратную связь. (Это означает, что физическая энергия, поступающая в пассивную цепь, должна быть положительной и ограниченной.) Наоборот, если элемент обратной связи диссипативный, то энергия, определяемая (4.31) должна быть ограниченной снизу.
Теорема гиперустойчивости гарантирует устойчивость для класса собственно нелинейных систем с переменными параметрами. Очевидно, что требование (4.27) представляет собой достаточное, но чрезмерно ограничивающее условие. В вышеупомянутом простом линейном случае для устойчивости необязательно, чтобы прямой тракт был строго положительной вещественной величиной, а тракт обратной связи – положительно вещественной. Таким образом, в общем случае следовало бы ожидать, что эти условия не являются необходимыми. Хотя для нелинейных систем представляет интерес менее ограничивающий критерий, приведенная здесь формулировка пригодна для анализа данного класса алгоритмов адаптивной фильтрации.
Для демонстрации связи гиперустойчивости с адаптивной фильтрацией найдем сначала величину дополнительной ошибки:
где  и
и  определяются из формул (4.16) и (4.20). отметим, что ошибка
определяются из формул (4.16) и (4.20). отметим, что ошибка  тесно связана с
тесно связана с  ; как указывалось, если
; как указывалось, если  по мере сходимости параметров, то
по мере сходимости параметров, то  . Можно читать, что для практических скоростей сходимости величины ошибки идентичны; об их различии следует помнить лишь в интересах строгости рассуждений. Уравнение для вспомогательной ошибки можно составить подобно (4.17):
. Можно читать, что для практических скоростей сходимости величины ошибки идентичны; об их различии следует помнить лишь в интересах строгости рассуждений. Уравнение для вспомогательной ошибки можно составить подобно (4.17):

 (4.33)
(4.33)
Добавляя и вычитая член
 (4.34)
(4.34)
и производя преобразования, получим:

 (4.35)
(4.35)
где
 (4.36)
(4.36)
Таким образом, дополнительная ошибка связана с авторегрессивным процессом  - го порядка, полюсы которого идентичны полюсам неизвестного АРСС – устройства. Управляющая функция
- го порядка, полюсы которого идентичны полюсам неизвестного АРСС – устройства. Управляющая функция  является функцией параметрических ошибок
является функцией параметрических ошибок  и
и  . Это соотношение схематически изображено на рис. 4.6, а, где
. Это соотношение схематически изображено на рис. 4.6, а, где
 (4.37)
(4.37)
Отметим, что входной сигнал фильтра  входит в расчет только в виде изменяющегося во времени коэффициента.
входит в расчет только в виде изменяющегося во времени коэффициента.

Рис. 4.6. Адаптивный фильтр с точки зрения гиперустойчивости:
разомкнутый контур (а); адаптационная обратная связь (б);
линейный препроцессор (в); гиперустойчивая адаптация (г). (Из работы [185].)
В адаптивном случае параметрические оценки  и
и  корректируются с помощью характеристики обратной связи. Это действительно замыкает контур, как показано на рис. 4.6, б, где корректировочный алгоритм определяет функциональную форму . Отметим, что в общем случае цепь обратной связи является нелинейной и имеет переменные параметры; следовательно, алгоритм, удовлетворяющий условиям теоремы гиперустойчивости, включенным в выражение (4.33), подходит для обеспечения сходимости дополнительной ошибки.
корректируются с помощью характеристики обратной связи. Это действительно замыкает контур, как показано на рис. 4.6, б, где корректировочный алгоритм определяет функциональную форму . Отметим, что в общем случае цепь обратной связи является нелинейной и имеет переменные параметры; следовательно, алгоритм, удовлетворяющий условиям теоремы гиперустойчивости, включенным в выражение (4.33), подходит для обеспечения сходимости дополнительной ошибки.
Чтобы удовлетворять условиям гиперустойчивости, прямая ветвь схемы должна быть СПД – ветвью. Вообще говоря, простая авторегрессивная форма  будет нарушена.
будет нарушена.
Для дополнения ее до СПД – формы необходимо выделить в линейный препроцессор  , за которым следует основной элемент, как показано на рис. 4.6, в. На выходе происходит дополнительный процесс
, за которым следует основной элемент, как показано на рис. 4.6, в. На выходе происходит дополнительный процесс  , определяемый формулой (4.25), т. е.
, определяемый формулой (4.25), т. е.
 (4.38)
(4.38)
В этом случае,  - просто взвешенное среднее или сглаженная версия выходной ошибки. Преобразование системы приводит к схеме, изображенной на рис. 4.6г, с составным линейным элементом в прямой ветви
- просто взвешенное среднее или сглаженная версия выходной ошибки. Преобразование системы приводит к схеме, изображенной на рис. 4.6г, с составным линейным элементом в прямой ветви
 (4.39)
(4.39)
В этой форме на выходе замкнутого контура присутствует сигнал  , представляющий собой дополнительную ошибку, подвергнутую скользящему усреднению. Эта ошибка введена в функцию
, представляющий собой дополнительную ошибку, подвергнутую скользящему усреднению. Эта ошибка введена в функцию  для корректировки весов адаптивного фильтра и , и генерации управляющей последовательности . Если величины
для корректировки весов адаптивного фильтра и , и генерации управляющей последовательности . Если величины  выбираются таким образом, чтобы обеспечить СПД – свойство для функции
выбираются таким образом, чтобы обеспечить СПД – свойство для функции  , а алгоритм, использующий , удовлетворяет соотношению (4.31), система с замкнутым контуром является гиперустойчивой и
, а алгоритм, использующий , удовлетворяет соотношению (4.31), система с замкнутым контуром является гиперустойчивой и  . Величина ошибки , зависящей от внутреннего состояния , также должна сходиться к нулю. ГАРФ – корректирующий алгоритм, описанный в предыдущем разделе, как показано в работе [164], удовлетворяет условиям гиперустойчивости.
. Величина ошибки , зависящей от внутреннего состояния , также должна сходиться к нулю. ГАРФ – корректирующий алгоритм, описанный в предыдущем разделе, как показано в работе [164], удовлетворяет условиям гиперустойчивости.
Коэффициенты , образующие скользящее среднее выходной ошибки, представляют собой набор  расчетных параметров, выбранных для обеспечения СПД – свойства для функции в формуле (4.39). Знаменатель, определяемый неизвестным АРСС – процессом, и описываемый
расчетных параметров, выбранных для обеспечения СПД – свойства для функции в формуле (4.39). Знаменатель, определяемый неизвестным АРСС – процессом, и описываемый  , дает вклад в фазу, который может регулироваться положением нулей (т. е. выбором ) для ограничения фазы цепи величиной
, дает вклад в фазу, который может регулироваться положением нулей (т. е. выбором ) для ограничения фазы цепи величиной  . В качестве примера рассмотрим рис. 4.7.
. В качестве примера рассмотрим рис. 4.7.

Рис. 4.7 Система второго порядка; СПД – область функции передачи. (Из работы [185].)
Допустим, что генерируется фильтром второго порядка, имеющим комплексные полюсы. Если проанализировать передаточную функцию
 (4.40)
(4.40)
то она была бы СПД – функцией лишь для нескольких сопряженных полюсных пар; СПД – область показана внутри единичного круга, в виде не заштрихованного овала. Следовательно, полностью исключая изменение числителя функции , лишь для нескольких полюсных пар можно использовать формулировку гиперустойчивости. Интересно отметить, что в области, где будут группироваться полюсы вновь дискретизированного непрерывного процесса, окрестность вблизи  исключается.
исключается.
Если только в формуле (4.39) принять во внимание изменения числителя, то область расположения СПД – полюсов можно целенаправленно деформировать для частей единичного круга, внутри которых есть вероятность нахождения неизвестных полюсов.
Этот эффект демонстрируется на рис. 4.8 для нескольких значений единственного сглаживающего коэффициента  . Отметим, что
. Отметим, что  дает, как и ранее, овальную область; как только становится отрицательным и у функции образуется нуль на положительной действительной оси, СПД – область деформируется в направлении
дает, как и ранее, овальную область; как только становится отрицательным и у функции образуется нуль на положительной действительной оси, СПД – область деформируется в направлении  . И наконец, при
. И наконец, при  область становится круглой, касающейся единичного круга при , и охватывает точки расположения низкочастотных полюсов. Введение параметров не только целенаправленно изменяет СПД – область, но также влияет на характер сходимости [301], как показано в следующем разделе.
область становится круглой, касающейся единичного круга при , и охватывает точки расположения низкочастотных полюсов. Введение параметров не только целенаправленно изменяет СПД – область, но также влияет на характер сходимости [301], как показано в следующем разделе.
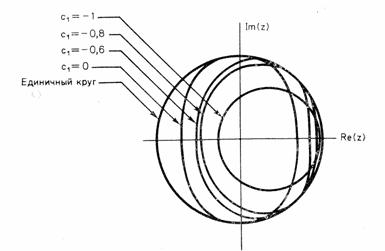
Рис. 4.8. Система второго порядка; СПД – область при сглаживании ошибки. (Из работы [185].)
Самым важным практическим соображением при выборе коэффициентов  , гарантирующим СПД – область для (4.39), является то, что знаменатель неизвестен. Если задать некоторые априорные сведения о динамике процесса
, гарантирующим СПД – область для (4.39), является то, что знаменатель неизвестен. Если задать некоторые априорные сведения о динамике процесса  , то разумный выбор числителя для будет просто оценкой знаменателя. Очевидно, при точной оценке обеспечивается полное сокращение числителя и знаменателя, и получается вырожденный результат, обладающий СПД – свойством, и детерминированный алгоритм, эквивалентный разновидности уравнения ошибки (например, МНК). Неточные оценки, хотя и не исключают динамику , могут служить для нахождения фазового угла. Например, было найдено, что смещенная оценка параметров знаменателя, выведенная на основании метода уравнения ошибки, обеспечивает свойство строгой положительности и действительности для (4.39) при некоторых значениях отношения сигнал – шум (ОСШ) [163]. Как правило, размещение нулей в окрестности каждого полюса приводит к созданию разумного набора коэффициентов . Можно также разработать алгоритм регулирования коэффициентов , аналогичный некоторым алгоритмам теории идентификации выходной ошибки [183].
, то разумный выбор числителя для будет просто оценкой знаменателя. Очевидно, при точной оценке обеспечивается полное сокращение числителя и знаменателя, и получается вырожденный результат, обладающий СПД – свойством, и детерминированный алгоритм, эквивалентный разновидности уравнения ошибки (например, МНК). Неточные оценки, хотя и не исключают динамику , могут служить для нахождения фазового угла. Например, было найдено, что смещенная оценка параметров знаменателя, выведенная на основании метода уравнения ошибки, обеспечивает свойство строгой положительности и действительности для (4.39) при некоторых значениях отношения сигнал – шум (ОСШ) [163]. Как правило, размещение нулей в окрестности каждого полюса приводит к созданию разумного набора коэффициентов . Можно также разработать алгоритм регулирования коэффициентов , аналогичный некоторым алгоритмам теории идентификации выходной ошибки [183].
Дата добавления: 2015-08-02; просмотров: 62 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ОБРАЗЕЦ ЗАЯВЛЕНИЯ | | | Упражнения на подготовительном этапе |