Читайте также:
|
В данном дипломном проекте, для управления технологическим процессом очистки метанола от ионов железа, был выбран контроллер ОВЕН ПЛК73. Одним из важных контуров регулирования в процессе является контур регулирования давления в реакторе синтеза. Для нормального хода технологического процесса необходимо определить оптимальные настроечные параметры регулятора встроенного в контроллер в этом контуре. Для расчета таких параметров требуется иметь математическую модель объекта. Для расчета таких параметров требуется иметь математическую модель объекта. Математическую модель можно получить либо аналитически, или же экспериментальным данным. В данном дипломном проекте математическая модель в виде передаточной функции определяется по экспериментальным данным. Определить передаточную функцию можно с помощью различных методов, но более всего актуальны: метод Симаю и метод Ротача.
3.1 Определение математической модели объекта по исходным данным
Исходные данные приведены в таблице 1.
Таблица 1
| t | |||||||||||
| y | 10.6 | 13.6 | 15.8 | 17.1 | 18.7 | 19.1 | 19.4 |
Исходя из вида кривой разгона представленной на рисунке 1, объект обладает передаточной функции состоящий из апериодического и звена чистого запаздывания. Поэтому целесообразно использовать метод Ротача. Для этого проводим касательную кривой разгона в области наибольшей скорости изменения регулируемого параметра.
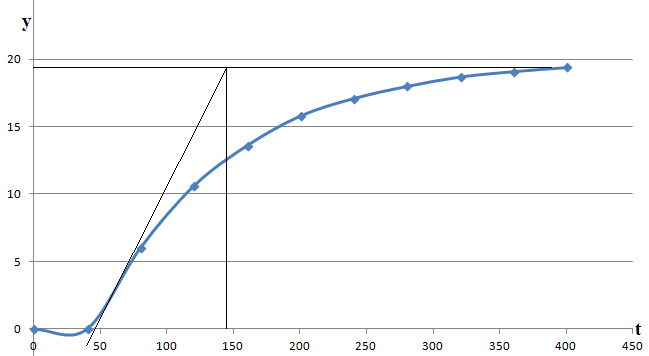
Рисунок 1- Кривая разгона
Согласно рисунку1 определяется коэффициент усиления объекта, постоянную времени и время запаздывания.
Коэффициент усиления – К=19,3
Время интегрирования - Т=100
Время запаздывания - τ=47
Таким образом передаточная функция объекта имеет вид:
W(p) = 
Передаточная функция с расчетными данными
W(p) = 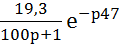
3.2 Определение настроечных параметров регулятора
Оптимальные настроечные параметры регулятора можно определить различными методами в частности по упрощенным формулам, по монограммам или методом расширенных частотных характеристик. Последний метод даёт наиболее оптимальные значения настроечных параметров. РЧХ отличаются от обычных РЧХ тем что, в них учитываются заданная колебательность переходного процесса.В данном дипломном проекте в контуре регулирования давления выбираем степень колебательности = 0.221.Поскольку закон регулирования в данном контуре выбран пропорционально интегральный, то для определения настроечных параметров необходимо построить линии равного затухания (ЛРЗ) для построения ЛРЗ воспользуемся компьютерной программой выполненной в среде «Qbasic».По результатам вычисления получаем таблицу 2
Таблица 2
| Кр | Кр\Ти |
| 0,0000241 | 0,0005 |
| 0,0171126 | 0,00083835 |
| 0,0345507 | 0,00108064 |
| 0,0517561 | 0,00128703 |
| 0,068178 | 0,00143214 |
| 0,0833132 | 0,0014928 |
| 0,09671 | 0,0014491 |
| 0,107961 | 0,001285 |
| 0,1167541 | 0,000989 |
| 0,122828 | 0,000555 |
| 0,126 | 0,0000188 |
В координатах Кр\Ти от Кр осуществляется построение линии равного затухания, рисунок 2.
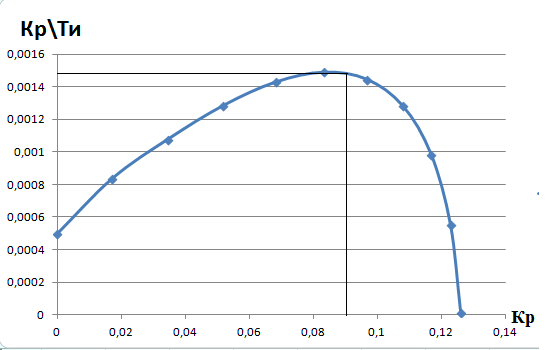
Рисунок 2 – Линия равного затухания
Выбирается точку правее от максимальной и получают координаты коэффициент передачи - Кр=0,09; и соотношения коэффициента передачи на постоянную интегрирования - Кр\Ти=0,00148; затем вычисляется постоянная интегрирования Ти=60,8; Таким образом, параметры регулятора следующие Кр=0,09 и Ти=60,8.
3.3 Моделирование системы управления
Для уточнения настроечных параметров регулятора проведем моделирование процесса регулирования давления в среде SanSim. Составляем модель системы, рисунок 3, в которой регулятор смоделирован звеном 3, а объект в виде двух звеньев апериодическое звено 4 и звеном чистого запаздывания 5.
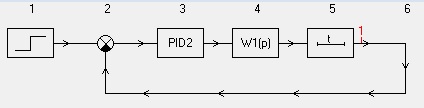
Рисунок 3 – Структурная схема системы управления
Исследования проводим при воздействии на систему скачкообразного единичного воздействия. В результате моделирования получили при Кр=0,09 и Ти=60,8 получили график переходного процесса риcунок.4.
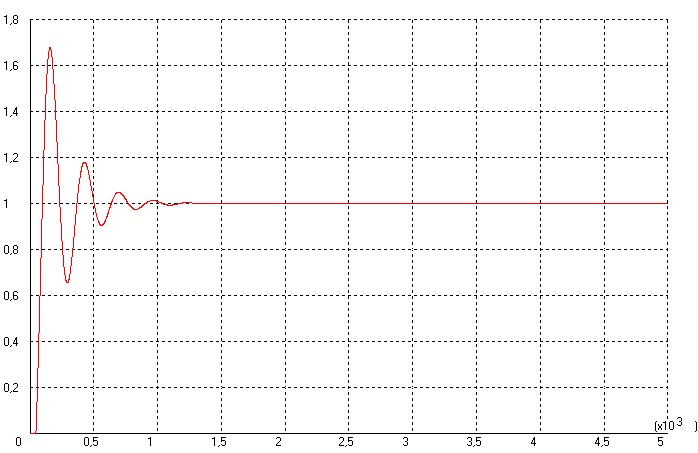
Рисунок 4 – График переходного процесса до коррекции
Как видно из графика переходной процесс колебательный, с большим временем интегрирования, с большим перерегулированием (>20%) и превышающим числом колебаний, поэтому считать его оптимальным нельзя.
Для улучшения вида переходного процесса уменьшаем коэффициент усиления регулятора и увеличиваем время интегрирования Кр=0.065 и Ти=90
В результате получаем переходной процесс представленный на рисунке 5
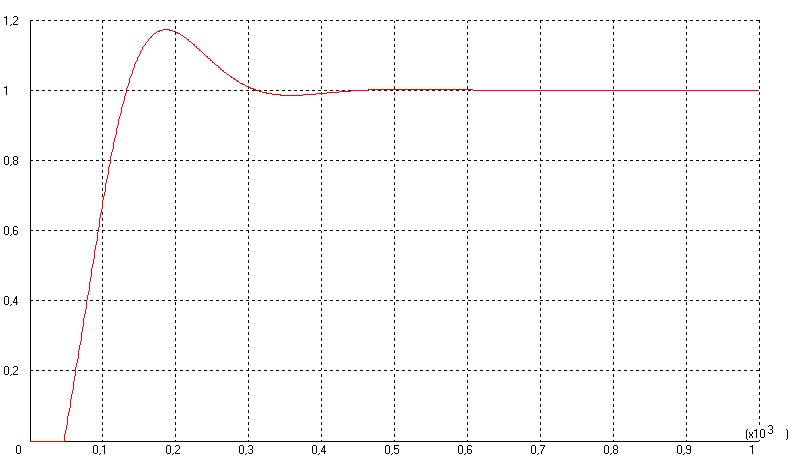
Рисунок 5 – График переходного процесса после коррекции
Данный переходной процесс можно считать оптимальным т.к перерегулирование не превышает 20% и число колебаний не больше трех. Таким образом, выбираем параметры: коэффициент усиления - Кр=0.065 и постоянная интегрирования - Ти=90.
Дата добавления: 2015-08-10; просмотров: 154 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Пистолеты-пулемёты/Штурмовые винтовки | | | Смутное время и его причины в России. Кризис и обществ в начале XVII века. |