Читайте также:
|
Задание:
1) По заданным дифференциальным уравнениям элементов входящих в структуру определить их передаточные функции W(p).
2) Построить структурную схему САР и определить и её общую передаточную функцию при заданном входном воздействии по каналу регулирования.
3) Определить устойчивость САР по критерию Михайлова и критерию Гурвица. При неустойчивой работе структуры произвести коррекцию, определив изменённые коэффициенты и довести систему до устойчивого состояния.

Исходные данные (вариант №2, блок №4):
Дифференциальные уравнения:
1. 
2. 
3. 
4. 
Уравнения связи элементов структурной схемы САУ:




Коэффициенты дифференциальных уравнений приведены в таблице 1:
| k1 | T1 | k2 | T2 | k3 | k4 | T4 |
| 0,05 | 0,3 | 0,9 | 0,7 |
Решение:
1. Определение передаточных функций по заданным дифференциальным уравнениям.
a) T1(p)+y1(p)+y1(p)=k1x1(p) y1(p)*(T1p+1)= k1x1(p)
b) T2(p)+y2(p)+y2(p)=k2x2(p) y2(p)*(T2p+1)= k2x2(p)
c) y3=k3x3 

d) T4(p)+y4(p)+y4(p)=k4f4(p) y4(p)*(T4p+1)= k4f4(p)
2. Структурная схема САУ. Передаточные функции замкнутой САУ по каналам управляющего и возмущающего воздействий.
|


 x4
x4

|
|










 g x1 y1 x2 y2
g x1 y1 x2 y2
 | |||||||
 |  | ||||||
 | |||||||
y3 x3
|
Определение передаточной функции замкнутой САУ.
Упростим схему объединив W2(p) и W3(p)
Определим передаточную функцию замкнутой системы W(p)зам.сис при f(p)=0.
Определим передаточную функцию замкнутой системы по каналу возмущающего воздействия W(p)f при g(p)=0.
Полученную функцию исследуем на устойчивость замкнутой САУ по критериям устойчивости Гурьвица и Михайлова.
3. Исследование на устойчивость замкнутой САУ по критериям устойчивости Гурьвица и Михайлова.
Определение устойчивости САУ по критерию Гурьвица
Возьмем характеристическое уравнение:
D(p)= 
Если характеристическое уравнение имеет первый или второй порядок, то для устойчивости достаточно, что бы коэффициенты a0, a1, a2, были больше нуля.
Как видно из нашего характеристического уравнения коэффициенты a0>0 a1>0 a2>0, что является условие устойчивости САУ по критерию Гурьвица.
Определение устойчивости САУ по критерию Михайлова.
Возьмем наше характеристическое уравнение:
D(p)=
Подставив в уравнение p=jω и получим:
D(jω)=0,04 (jω)2+4,42 jω+34,2= -0,04ω2+4,42 jω+34,2
Выделим в данном уравнении вещественную и мнимую части:
Re(w)=34,2-0,04w2
Im(w)=4,42w
Зависимость от частоты реальной и мнимой частей характеристического уравнения представлена в таблице 2 и на рис. 2.
Рис.2
Таблица 2.
| w | ||||||||
| Re | 34,2 | 30,2 | 25,2 | 18,2 | 9,2 | -2,2 | -29,8 | -65,8 |
| Im | 44,2 | 66,3 | 88,4 | 110,5 | 132,6 | 176,8 |
Из рис. 2 видно, что годограф обходит начало координат в следующем порядке: 1ый квадрант, 2ой квадрант и уходит в ∞. Это является условием устойчивости САУ по критерию Михайлова.
4. Определение области устойчивости САУ методом D-разбиения
Определим область устойчивости САУ методом D-разбиения по коэффициенту усиления K1. Возьмем передаточную функцию замкнутой системы W(p) раз.сис
Подставим значения передаточных функций в передаточную функцию замкнутой системы W(p) раз.сис, получим:
Из полученного выражения возьмем характеристическое уравнение замкнутой системы автоматического управления:
D(p)= 
Запишем характеристическое уравнение в виде:
 =0
=0
Построим облость устойчивости K1 для системы:
· Выведем интересующий нас параметр.
k1=-0,025p2-1,7p-0,43
Заменим p=jω, получим:
k1=0,025  2-1,7j -0,43
2-1,7j -0,43
Выделим в данном уравнении вещественную и мнимую части:

Зависимость от частоты реальной и мнимой частей характеристического уравнения представлена в таблице 3 и на рис. 3.
Таблица 3
| ω | 4,1 | +∞ | ||||||||
| Re | -0,43 | -0,41 | -0,33 | -0,21 | 0,2 | 1,17 | 2,07 | 9,6 | +∞ | |
| Im | -1,7 | -3,4 | -5,1 | -6,97 | -8,5 | -13,6 | -17 | -34 | +∞ |
Рис.3
Осуществим проверку с помощью критерия Гурвица, для этого в характеристическое уравнение подставим значения К1 не устойчивости, получим:

Подставим значение из области устойчивости k1= 1.
Получим:

Видно что коэффициенты  , больше нуля, значит система устойчива.
, больше нуля, значит система устойчива.
Подставим значение из области не устойчивости k1=-1, получим:

Видно что коэффициент a2 меньше нуля, значит система не устойчива.
Проверка показала, область устойчивости была верно определена методом D-разбиения.
5. Расчет переходного процесса регулируемого параметра в САУ.
На рис. 4 представлена структурная схема САУ в программе МВТУ для расчета переходного прочеса по каналу управляющего воздействия.
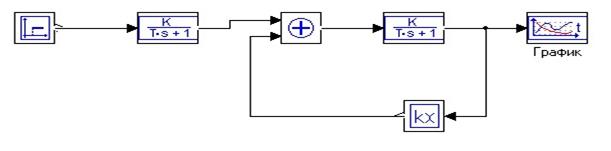
рис. 4 структурная схема САУ в программе МВТУ для расчета переходного прочеса по каналу управляющего воздействия.
На рис. 5 представлена кривая в программе МВТУ переходного процесса.
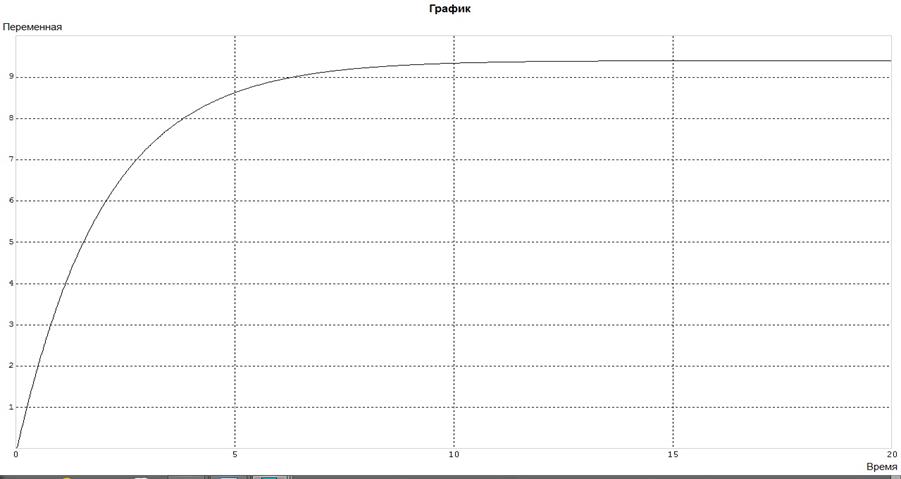
рис. 5 кривая в программе МВТУ переходного процесса.
6. Определение показателей качества регулирования и максимального регулируемого параметра.
По кривой представленной на рис. 5 определим время регулирования.
Для этого на кривой отмечаем  от
от  , и проводим линии параллельные оси абцис. На пересечении кривой и нижней линии получаем точку это и есть время регулирования
, и проводим линии параллельные оси абцис. На пересечении кривой и нижней линии получаем точку это и есть время регулирования  . На рис. 6 представлена часть кривой переходного процесса.
. На рис. 6 представлена часть кривой переходного процесса.
По кривой представленной на рис.6 определяем максимальное ускорение  .
.
Для этого проводим касательные к точкам 0 и  и строим треугольники. Скорости находятся как отношений приращений
и строим треугольники. Скорости находятся как отношений приращений 
Получив скорости  подставляем в формулу для максимального ускорения :
подставляем в формулу для максимального ускорения :
7. Определение показателей качества регулирования.
Показатели качества регулирования вычисляются по следующим формулам:  . Получим:
. Получим:
8. Построение ЛАЧХ  не изменяемой части разомкнутой САУ.
не изменяемой части разомкнутой САУ.
Возьмем передаточную функцию разомкнутой САУ
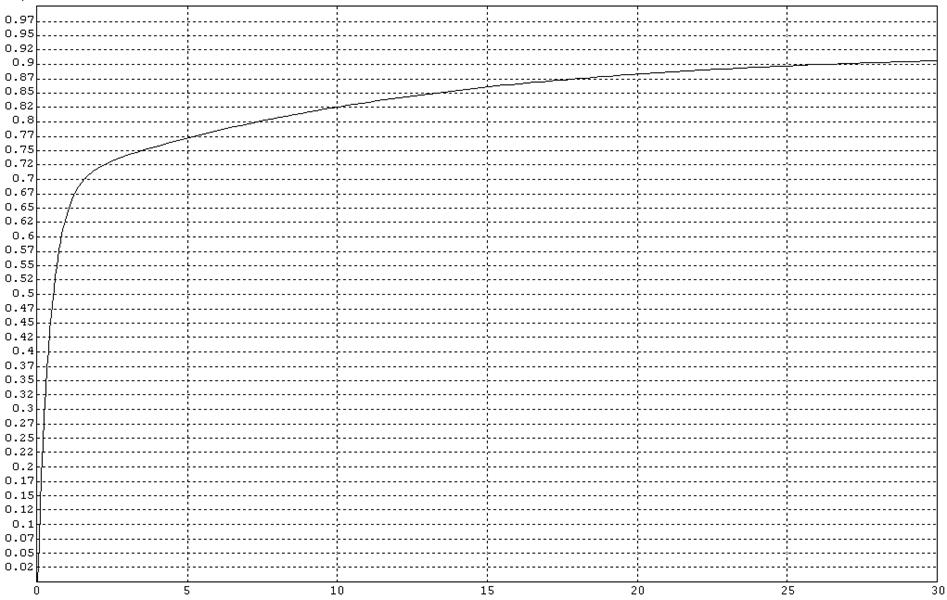
рис. 6 часть кривой переходного процесса
Подставив значения передаточных функций получим:
Найдем сопряженные частоты:
На рис.7 представлена ЛАЧХ не изменяемой части разомкнутой САУ.
9. Построение желаемой ЛАЧХ 
Для построения желаемой ЛАЧХ , найдем частоту среза  , для среднечастотной асимптоты. Для этого используем номограмму, составленная В.В. Солодниковым на рис. 8. По заданному значению перерегулирования
, для среднечастотной асимптоты. Для этого используем номограмму, составленная В.В. Солодниковым на рис. 8. По заданному значению перерегулирования  определим отношение между
определим отношение между  . Используя формулу:
. Используя формулу:
 .
.
Дано  , от сюда получаем
, от сюда получаем  , тем самым мы нашли частоту при которой время регулирования не превысит заданного значения. При начальном рассогласовании ускорение регулируемой величины ограничивается значением
, тем самым мы нашли частоту при которой время регулирования не превысит заданного значения. При начальном рассогласовании ускорение регулируемой величины ограничивается значением 
 , то максимальное значение определяется из отношения:
, то максимальное значение определяется из отношения:
 , где
, где  . Получим:
. Получим:
Т.к.  , то частоту среза принимаем
, то частоту среза принимаем 
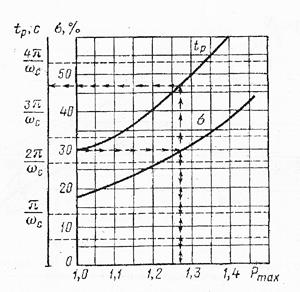
Рис.8 Показатели качества регулирования САУ в зависимости от максимума вещественной частотной характеристики разомкнутой системы.
Среднечастотная асимптота желаемой ЛАЧХ проводится через частоту среза с наклоном -20 дБ/дек.
Найдем частоту сопряжения с низкочастотной областью. Для этого воспользуемся номограммой на рис. 9, по ней определяем предельные значения логарифмических амплитуд. В нашем случае это значение  . На этих отметках проводим линии параллельные оси частот. В точках пересечения этих линий и средне частотной асимптоты мы получаем сопрягающие частоты. Для определения низкочастотной области воспользуемся следующим выражением
. На этих отметках проводим линии параллельные оси частот. В точках пересечения этих линий и средне частотной асимптоты мы получаем сопрягающие частоты. Для определения низкочастотной области воспользуемся следующим выражением  .
.
Возьмем ω= 1 получим: 
Возьмем ω=К получим: 
По этим 2 тучкам строем наклонную линию АВ, её наклон -20дБ/дек.
Из точки сопряжения низкочастотной и среднечастотной проводим наклонную, с наклоном -40дБ/дек, до пересечения с линией АВ.
Высокочастотную асимптоту проводим параллельно желаемой ЛАЧХ, т.к. она мало влияет на свойства системы.
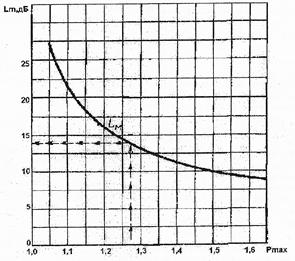
Рис. 9 Зависимость значений желаемой ЛАЧХ на границах среднего поддиапаозона от максимума вещественной частотной характеристики разомкнутой системы.
На рис.7 представлена желаемая ЛАЧХ .
10. Определение ЛАЧХ  корректирующего звена.
корректирующего звена.
Т.к в нашей системе корректирующее звено последовательное, то для построения ЛАЧХ корректирующего звена, воспользуемся формулой:

На рис.7 представлена ЛАЧХ корректирующего звена.
11. Определение передаточной функции  разомкнутой САУ по желаемой ЛАЧХ .
разомкнутой САУ по желаемой ЛАЧХ .
Для определения передаточной функции разомкнутой САУ по желаемой ЛАЧХ воспользуемся рис.7. Получим:
Найдем частоты сопряжения и получим Т
По ЛАЧХ показанной на рис.7 найдем К= 21,6
Подставим найденные Т, получим
12. Определение передаточной функции  корректирующего звена по ЛАЧХ .
корректирующего звена по ЛАЧХ .
Для определения передаточной функции разомкнутой САУ корректирующего звена по полученной ЛАЧХ воспользуемся рис.7. Получим:
Найдем частоты сопряжения и получим Т
По ЛАЧХ показанной на рис.7 найдем К= 0,63.
Подставим найденные Т и К, получим

Дата добавления: 2015-07-25; просмотров: 55 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Введение. | | | Моя мечта 1 страница |