Читайте также:
|
1. Горочная автоматическая централизация
Объектами управления и контроля в горочной автоматической централизации являются стрелки. Управление стрелочными электроприводами осуществляется с пульта-табло ГАЦ. В этой системе нельзя осуществить одновременный перевод всех стрелок, входящих в маршрут, и их замыкание, как это имеет место в релейных централизациях. Реализация этих принципов резко сократила перерабатывающую способность горки. Поэтому здесь каждый отцеп, скатываясь, сам «продвигает» свое маршрутное замыкание от стрелки к стрелке, воздействуя на схемы трансляции задания. Связывающим звеном между отцепами и схемными зависимости являются укороченные нормативно разомкнутые рельсовые цепи.
В настоящее время на сортировочных горках находиться в эксплуатации релейная система автоматической горочной централизации в блочном оформлении, получившая название БГАЦ-ЦНИИ. Её схемное обеспечение позволяет реализовать 64 маршрута в расчете на полную горку (8 пучков по 8 путей в каждом пучке).
Различают ручной (Р), маршрутный (М), программный (П) и автоматический (А) режимы работы устройств БГАЦ.
ü Перевод стрелок вручную является резервным, производиться с помощью стрелочных рукояток.
ü В режиме М набор маршрута осуществляется с помощью восьми маршрутных кнопок в момент подхода очередного отцепа к головной стрелке. При этом первое нажатие определенной из них воспринимается устройствами как номер пучка, а второе как номер пути в пучке. В целом номер маршрута зашифровывается в блоках формирования задания (ФЗ) и передается далее на стартовую позицию в блоки регистрации задания (РЗ). При условии свободности блоков трансляции (ТЗ) номер маршрута продвигается до блока первой стрелки, где дешифруется (ДШ). Если в результате требуется перевод стрелки, то он осуществляется с помощью блока СГ (рисунок 1). Продвижение маршрутного задания до следующей стрелки произойдет при вступлении отцепа на путевой участок первой стрелки, а маршрутное задание в блоках ТЗ до нее гасится.
ü В режиме П с помощью маршрутных кнопок осуществляется заблаговременное формирование маршрутных заданий в соответствии с расположением номеров отцепов в сортировочном листе. В зашифрованном виде они располагаются в блоках накопителя БН.
ü В режиме А маршрутные задания поступают из горочного программно-задающего устройства ГПЗУ, в котором содержаться необходимая информация о составе, подлежащем роспуску.
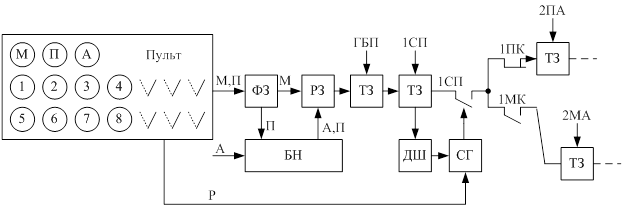
Рисунок 1 – Структурная схема БГАЦ
2. Система АРС
Скорость скатывания отцепов с горки и остановка их в нужном месте подгоночных путей регулируется вагонными замедлителями. Автоматическое управление ими осуществляется с помощью системы АРС. По способу создания тормозного эффекта вагонные замедлители делятся на зажимающие колесные пары вагонов и не зажимающие (электромагнитные, плунжерные гидравлические, башмачные и др.). Зажимающие вагонные замедлители доминируют на сортировочных горках российских железных дорог. Они содержат механизм, действие которого основано на захвате бандажей колес шинами (балками), выступающими над головкой рельсов с обеих его сторон. Примерная кинематическая схема такого замедлителя показана на рисунке 2.

Рисунок 2 – Кинематическая схема зажимающего вагонного замедлителя
Замедлитель работает по принципу клещей, которые образуются из двух рычагов: одноплечего 1 и двуплечего 2, насаженных на общую ось 3, укрепленную на опоре 4. Концы рычагов соединены шарнирно с корпусом 5 и штоком 6 тормозного цилиндра. На площадке рычагов уложены тормозные балки 7 с прикрепленными к ним тормозными шинами 8. Положение тормозной системы по отношению к поверхности рельса регулируется пружинами 9. Замедлитель имеет два положения – расторможенное, когда в тормозном цилиндре сжатый воздух отсутствует, и тормозные балки разведены, и заторможенное, при котором тормозные балки под воздействием сжатого воздуха сближаются и захватывают колесо с двух сторон. Сила торможения зависит от давления сжатого воздуха в тормозном цилиндре, что определяется состоянием электропневматических клапанов системы АРС.
В настоящее время эксплуатируются две разновидности системы: АРС-ЦНИИ и АРС-ГТСС. В системе АРС-ЦНИИ верхняя тормозная позиция (1ТП) обеспечивает необходимые интервалы между отцепами; средняя (2ТП) – как интервалы, так и необходимую дальность пробега отцепов при безопасной скорости соударения их с вагонами, находящимися на подгорочных путях; нижняя (3ТП) является прицельной. В системе АРС-ГТСС позиции 1ТП и 2ТП являются интервальными.
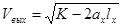
В общем случае скорость выхода отцепа из тормозной позиции описывается уравнением
 (1)
(1)
где V pc – расчетная скорость соударения отцепов (5км/ч);
a x – ускорение движения отцепа в пределах зоны регулирования;
l x – расстояние от тормозной позиции до стоящих на пути вагонов;
V доп – дополнительная скорость, которую должен иметь отцеп для преодоления сопротивлений от кривых и стрелок по маршруту своего следования.
Т.к. скорость V pc и V доп для каждой тормозной позиции известны, то, обозначив V2 pc + V2 доп = K, окончательно имеем
 . (2)
. (2)
Таким образом, в качестве исходных данных в системе должны быть обозначены ускорение a x и длинна пробега l x, а соответствующие технические средства моделировать уравнение 2 (рисунок 3). Ускорение a x определяется блоком ИЗУ по временным засечкам t 1 и t 2 прохождения отцепом двух звеньев головного измерительного участка, ограниченных педалями П1, П2, П3.
Рисунок 3 – Структурная схема АРС
где l П – расстояние от позиции 3ТП до вагонов, стоящих на маршрутном пути;
l СТР – длина стрелочной зоны, начинается от позиции 2ТП;
l 0i – длина i -го отцепа;
k – число движущихся на путь отцепов с учетом распускаемого.
Отметим, что при интервальном торможении ускорение a x в значительной степени зависит от основного удельного сопротивления в буксовых узлах отцепа, а последнее на ускоряющем уклоне прямо пропорционально силе тяжести отцепа. Следовательно, для такого случая скорость выхода можно рассчитать по весовой категории отцепа q 0. Она определяется как среднее арифметическое весовых характеристик вагонов, входящих в отцеп (легкой, легко-средней, средней, средне-тяжелой, тяжелой и особо тяжелой). С этой целью головной участок горки оборудуется весомером ВМ, представляющий собой пружинную балку с контактной коробкой. В последней находится шесть пар вертикально расположенных контактных групп. Чем сильнее прогибается балка при накате на неё колеса, тем большее количество контактных пружин воспринимает её прогиб. Число прогибов n фиксируется блоком вычисления весовой категории и длинны отцепов ВВКД. Вычисленные значения a x, q 0, n 0 поступают в блок накопителя Н1 и с помощью устройств ГАЦ транслируются к вычислительным средствам второй тормозной позиции 2ТП. С выхода блока ВВКД рассчитанное значение скорости V вых1 поступает на устройства управления верхней тормозной позицией УТП1, где сравнивается с фактической скоростью скатывания отцепа V ф1, измеренной радиолокационным измерителем РИС1. По результатам сравнения выбирается степень торможения отцепа.
При определении скоростней выхода для позиций 2ТП и 3ТП требуется в качестве исходного значение дальности пробега отцепа l x. Она определяется по формулам
 ; (3)
; (3)
 ; (4)
; (4)
Для определения расстояния l п в системе предусматриваются устройства контроля заполнения путей подгорочного парка КЗП. С этой целью каждый путь разбивается на участки по 30 м каждый, оборудованные бесстыковыми тональными цепями и измерительными трансформаторами. Первичные обмотки трансформаторов включаются в цепь 220В, а вторичные – через контакты путевых реле – последовательно с первичной обмоткой выходного трансформатора. Напряжение, снимаемое с его вторичной обмотки, находиться в пропорциональной зависимости от числа свободных участков подгорочного пути.
Длина стрелочной зоны имеет известное значение, а длина каждого отцепа измеряется подсчетом осей, прошедших через весометр.
Вычислитель скоростей выхода ВСВ для позиций 2ТП и 3ТП является по конструкции общим, поэтому значение скорости V вых3 поступает в накопитель Н2 и транслируется устройством УТП3. Управление вагонными замедлителями 2ТП и 3ТП осуществляется по результатам сравнения подсчитанных и фактических скоростей скатывания отцепов. На каждой тормозной позиции, кроме автоматического управления, предусматривается ручное управление замедлителями с пульта (ПУ).
В качестве элементной базы в системах АРС-ЦНИИ, АРС-ГТСС широко используются реле, вычислительные трансформаторы, полупроводниковые преобразователи аналоговых величин в дискретные и наоборот.
3. Система АЗСР
Перерабатывающую способность горки можно существенно увеличить, если роспуск составов вести с переменной скоростью. Рекомендуемая скорость 3,6-5,4 км/ч определяется неблагоприятными состояниями отцепов по их ходовым свойствам, что в практике встречается не так часто. При благоприятных условиях скорость надвига можно повышать до 9-10 км/ч. Автоматизация процессов, связанных с заданием переменной скорости роспуска составов, управления огнями горочного светофора и маршрутных указателей, осуществляется системой АЗСР.
В основу её построения положена зависимость максимально допустимой скорости надвига составов V 0 от условий расхождения двух смежных отцепов на разделительной стрелке. Она описывается уравнением:
 , (5)
, (5)
где l 1, l 2 – длины соответственно 1 и 2 отцепов;
b 1 и b 2 – их колесные базы;
l рц – длина рельсовой цепи на разделительной стрелке;
V min – минимальная скорость движения плохого бегуна;
Δ t – разность времени хода плохого и хорошего бегуна до разделительной стрелки.
Вычисление V 0 техническими средствами осуществляется всякий раз, когда происходит отделение от состава очередного отцепа. Таким образом, система АЗСР должна содержать источник информации о маршрутах следования двух смежных отцепов, чтобы определить разделительную стрелку, и количество вагонов в них; устройства вычисления скорости V 0 и её преобразования в удобный для пользователя вид. Рассмотрим взаимодействие соответствующих узлов системы на примере АЗСР-ЦНИИ (рисунок 4).
Программа роспуска состава формируется в технической конторе станции с помощью видео терминального устройства ВТ-340. Она содержит номер состава, число вагонов в нем, время его прибытия, сведения о каждом отцепе: порядковый номер, номер пути, число вагонов, особый признак или отметку длиннобазного вагона. По запросу оператора горки программа через формирователь вызова УВИВ и устройство сопряжения УС передается на горочный пост и высвечивается на экране ВТ-340. Оператор горки при необходимости может скорректировать программу. После нажатия клавиши «Пуск» устройства АЗСР и ГАЦ подключаются к её реализации.
Информация о смежных отцепах считывается в двухступенчатый накопитель НИ. Управление накопителем осуществляется блоком УУ, поставленным в зависимость от контрольного блока КО. В последнем сравнивается, скорость надвига и свободного скатывания, измеренные радиолокационными скоростемерами РИС1 и РИС2, и улавливается их разница в момент отрыва. Схема блока КО приводиться в исходное состояние для работы в очередном цикле после полного проследования отцепом места установки фотоэлектрического устройства ФЭУ.
После определения блоком РС разделительной стрелки информация поступает в блок вычисления скорости роспуска ВСР. Последний содержит трансформаторную схему, моделирующую управление. Её выходное напряжение подается в блок ПСР, где происходит преобразование аналогового значения скорости роспуска в дискретную величину. Здесь же происходит её усреднение, чтобы исключить резкие перепады в ее значениях, и корректировка, если требуется учесть особый признак отцепа. Блок ПСР содержит 15 выходов, соответствующих градациям скорости от 3 до 9 через каждые 0,5 км/ч. Вычисленные значения скорости фиксируются блоком ФВС, который включает соответствующие реле управления световой индикацией УИ, коммутирующие цепи ламп горочного светофора и маршрутного указателя скорости роспуска. На отдельных маршрутных участках высвечивается информация о количестве вагонов в соседних отцепах, поступающая от блоков ВКВ1 и ВКВ2.

Рисунок 4 – Структурная схема АЗСР
Система АЗСР может быть дополнена устройствами телеуправления горочным локомотивом (ТГЛ). В этом случае блок ФВС дополнительно увязывается с шифратором ТГЛ.
4. Система КГМ
Система КГМ разработана коллективом ученых конструкторов РИИЖТа и Ростовского филиала ВНИИЖТа. Она решает в комплексе задачи, свойственные системам ГАЦ-КР, АРС, АЗСР, ГПЗУ, и отличается от них расширенными функциональными возможностями, программно-аппаратной гибкостью, относительно высокой скорости информации, наличием сервисного оборудования, простотой и удобством обслуживания.
Элементной базой системы являются микропроцессорные средства диспетчеризации, автоматики и телемеханики – микроДАТ. Конструктивно функциональные элементы выполнены в виде отдельных печатных плат с микросхемами. Их компоновка осуществлена по типу модулей (до 20 разновидностей), размещенных в 11 блоках. Последние установлены в 3 компоновочных шкафах, соответствующих подсистемам «Маршрут», «Скорость», «Диспетчер». Каждый компоновочный шкаф имеет кроссовое поле для подключения внешних кабелей. На кроссовых стативах размещены устройства согласования сигналов, обеспечивающих взаимодействие локальных подсистем с технологическим оборудованием. Сопряжение с релейными устройствами сортировочной горки осуществляется через оптронную развязку.
Вся спускная часть горки разбивается на ряд зон автоматизации, в пределах которых решается законченная задача по управлению и контролю за технологическим процессом в соответствии с требованиями алгоритмов подсистем (рисунок 5). Каждая зона оборудуется определенным комплексом датчиков и исполнительных устройств.
Подсистема «Маршрут» содержит 4 микропроцессорных блока Б1-Б4. Первый из них обрабатывает сигналы, поступающие от путевого оборудования головной зоны, пучковых стрелок и 1 тормозной позиции; обеспечивает слежение за правильностью скатывания отцепов, управление головной и двумя пучковыми стрелками и 1 тормозной позицией. Блоки Б2 и Б3 осуществляет слежение за правильностью скатывания отцепов соответственно в пределах 1-2-го и 3-4-го пучков и управление входящими в эти зоны стрелками и замедлителями 2 тормозные позиции. Блок Б4 связан с контрольным участком перед головной стрелкой и формирует информацию, необходимую для управления всеми стрелками и замедлителями: классифицирует отцепы по ходовым свойствам, рассчитывает переменную скорость роспуска и управляет горочным светофором и маршрутными указателями; прослеживает отрыв вагонов и формирование и формирование отцепов согласно программе, фиксирует на телетайпе ТЛТ2 сбои, отказы системы и ручные вмешательства дежурного по горке П1 и горочного оператора П2.

Рисунок 5 – Техническая структура КГМ
Подсистема «Скорость» содержит три микропроцессорных блока Б5-Б7, обеспечивающих прицельное регулирование скорости скатывания отцепов в зоне 3 тормозной позиции с учетом данных КЗП. Блок Б5 обеспечивает сбор всей информации о ходе роспуска, расчетных и фактических скоростях, состоянии участков, стрелок и замедлителей и передачу её в подсистему «Диспетчер» для отображения на дисплеях и протоколирования на телетайпе. Блоки Б6 и Б7 осуществляют расчёт скоростей выхода отцепов и управление замедлителями 3 тормозной позиции соответственно в пределах 1 – 2-го и 3 – 4-го пучков.
Подсистема «Диспетчер» содержит 4 микропроцессорных блока Б8-Б11. Блок Б8 служит для обеспечения оперативного диалога с ЭВМ дежурного по горке (через клавиатуру КЛ1 и дисплей ТВ1) и маневрового диспетчера (через клавиатуру КЛ2 и дисплей ТВ2), а также распечатки на телетайпе ТЛТ1 заданной и исполненной программ роспуска. Блок Б9 используется для организации индикации на цветном графическом терминале (ЦГТ) состояние накопительных устройств и исполнительных механизмов и формирования сообщений о сбоях системы или подсистем и переходе на резервное управление. Блок Б10 осуществляет выдачу индикации на черно-белые дисплеи ТВ3-ТВ6. Блок Б11 служит для организации двухсторонней связи с автоматизированной системой управления сортировочной станции АСУ СС, хранение подготовленных программ роспуска с инвентарными номерами вагонов (до 4 составов) и данных о накоплении вагонов на путях сортировочного парка.
Дата добавления: 2015-07-25; просмотров: 338 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Твердий Михайло Дмитрович | | | Диспетчерская централизация |