|
Читайте также: |
Частота 2f"o в 2 раза выше требуемой частоты синхронизации для формирования строб- импульсов, но кратное понижение частоты в радиотехнике известно и может быть выполнено как в аналоговой форме, так и непосредственно при формировании строб - импульсов (усиление и ограничение частоты 2f"o до формы меандра с последующим триггерным понижением в 2 раза).
Формирование последовательности строб - импульсов целесообразно выполнять в виде меандра с положительной полярностью импульса строба в первой половине тактового интервала кодирования и отрицательной – во второй половине, т.е. строб- импульс в целом занимает полный такт и является двуполярным импульсом (один период меандра). В этом случае детектирование сигнала в двоичную (битовую) форму можно производить путем интегрирования сигнала в пределах тактовых интервалов с умножением на полный строб- импульс, т.е. значение интеграла сигнала первой половины тактового интервала суммировать со значением интеграла сигнала второй половины тактового интервала со сменой его знака. С учетом протокола кодирования Манчестер-II и формы кодовых сигналов на выходе кабеля (рис. 16.1.2) это дает восстановление разнополярной битовой формы информации (1 – положительная полярность, 0 – отрицательная полярность).

Рис. 16.3.1. Декодирование выходных сигналов.
Пример декодирования различных кодовых последовательностей выходного сигнала по вышеприведенному методу приведен на рис. 16.3.1. Амплитудные вариации сигналов, вызываемые различной амплитудой выходных сигналов для последовательностей нулей и единиц и кодов 01 и 10, на выходе декодера нормируются по амплитуде соответствующим пороговым ограничением или логической фиксацией полярности выходного сигнала декодера при помощи нуль-детектора. На рис. 16.3.1 и на дальнейших рисунках выходные сигналы декодера приводятся без нормировки для показа вариаций значений интеграла в пределах тактовых периодов при влиянии дестабилизирующих факторов.
Контроль фазовой синхронизации фронта положительного импульса строба с началом тактовых интервалов кодирования устанавливается следующим образом. Параллельно с интегрированием сигнала в пределах такта с учетом полярности строб-импульса проводится интегрирование сигнала в пределах такта без изменения знака во второй половине такта. Переход выходных сигналов кода Манчестер-II через ноль в середине такта приводит к тому, что выходные сигналы интегрирования без изменения знака существенно меньше выходных сигналов интегрирования с изменением знака (практически нулевые для непрерывных последовательностей нулей и единиц и в 2 и более раза меньше для кодов 01 и 10). Если синхронизация нарушается (первым в фактическом тактовом интервале идет импульс строба отрицательной полярности, т.е. меандр стробирования смещается на полтакта), то значения выходных сигналов интегрирования меняются прямо на противоположные как по значениям, так и по соотношению значений. Это может использоваться для постоянного контроля правильности автосинхронизации и для немедленного восстановления синхронизации и исправления кода при сбое синхронизации.
Метод автосинхронизации тактовой частоты приемника и передатчика при использовании достаточно узкополосного селективного фильтра выделения частоты 2fo обеспечивает надежную синхронизацию на уровне статистических шумов на выходе кабеля, мощность которых может в несколько раз превышает среднюю мощность сигнала. Известные системы автосинхронизации в этих условиях полностью неработоспособны. Соответственно, интегрирование сигнала в пределах четко синхронизированных тактовых интервалов обеспечивает на высоком уровне шумов устойчивое декодирование сигналов. Предельное значение уровня шумов может определяться по устойчивости работы системы контроля за фазовой синхронизацией приемника и передатчика (разность интегралов со сменой и без смены знака на второй половине такта всегда должна иметь одну полярность).
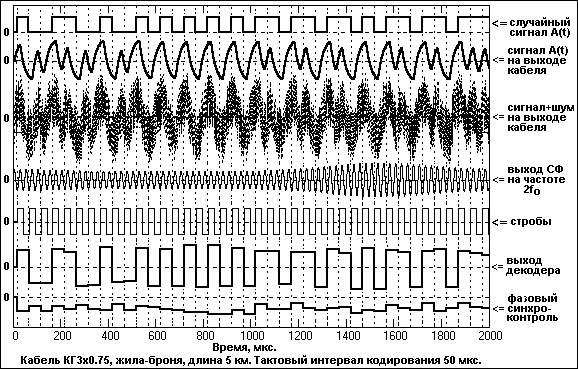
Рис. 16.3.2. Декодирование сигнала на высоком уровне шумов.
В качестве примера на рис. 16.3.2 приведены графики приема и декодирования произвольного сигнала на выходе кабеля, средняя мощность которого по интервалу 40 тактов в 2 раза меньше мощности шумов. Ширина полосы пропускания селектирующего фильтра на частоту 2fo=40 кГц была установлена равной 2 кГц на уровне 0.5 при постоянной времени установления фильтра порядка 10 тактовых интервалов (500 мкс).
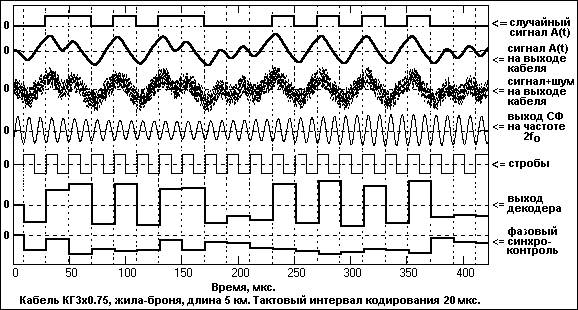
Рис. 16.3.3. Декодирование сигнала с повышенной тактовой частотой.
Возможность уверенного приема сигналов на высоком уровне шумов позволяет повысить тактовую частоту кодирования минимум в 2 раза. На рис. 16.3.3 приведен пример повышения тактовой частоты кодирования в 2.5 раза, до частоты 50 кГц. Амплитудные значения сигналов на такой частоте затухают для непрерывных последовательностей единиц и нулей в 20 раз, для чередования единиц и нулей в 8 раз. Мощность статистических шумов в пределах приведенного интервала равна средней мощности сигнала. Ширина полосы пропускания селективного фильтра, настроенного на частоту 100 кГц, в данном примере была установлена равной 5 кГц на уровне 0.5.
Как можно видеть из приведенного примера, для кодов 01 и 10 в кодовых последовательностях сигналов без шума пересечения нулевой линии для второго бита вообще не наблюдается, что является следствием резкой асимметрии импульсного отклика кабеля. На работоспособности системы синхронизации это не отражается, и система декодирования обеспечивает уверенное выделение информационного сигнала.
Литература
22. Сиберт У.М. Цепи, сигналы, системы. – М.: Мир, 1988. – 336 с.
Главный сайт автора ~ Лекции по сигналам ~ Практикум
О замеченных опечатках, ошибках и предложениях по дополнению: davpro@yandex.ru. Буду благодарен.
Copyright ©2005 Davydov А.V.
Дата добавления: 2015-07-11; просмотров: 101 | Нарушение авторских прав