Читайте также:
|
В зависимости от соотношения углов увода передних и задних колес (мостов) автомобили могут иметь различную поворачиваемость: нейтральную, недостаточную и излишнюю.
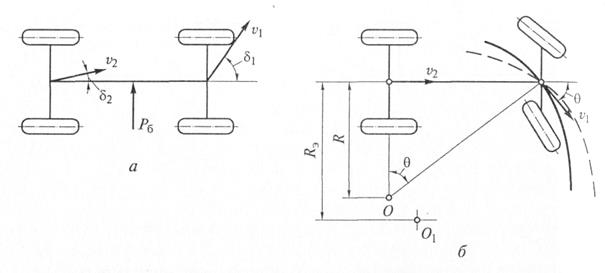
Нейтральная поворачиваемость (рис. 9.1, а)характеризуется тем, что углы увода передних и задних колес равны (δ1= δ2) и, следовательно, радиусы поворота автомобилей с нейтральной пово-рачиваемостью и жесткими колесами тоже равны, т.е. R э = R (рис. 9.1, б). Хотя радиусы поворота R эи R равны, траектории движения автомобилей с нейтральной поворачиваемостью и жесткими колесами не совпадают, так как центры их поворота находятся в разных точках (О и О 1).

Рис. 9.1. Схемы автомобиля с нейтральной поворачиваемостью:
а — возникновение углов увода колес; б — движение на повороте; v 1, v 2— векторы скоростей передних и задних колес; О, О 1 — центры поворота автомобилей
|
Рис. 9.2. Схемы автомобиля с недостаточной поворачиваемостью:
а — возникновение углов увода колес; б — движение на повороте; v 1, v 2 — векторы скоростей передних и задних колес; О, О 1 — центры поворота автомобилей
Недостаточная поворачиваемостъ (рис. 9.2, а)характеризуется тем, что угол увода передних колес больше, чем задних (δ2 > δ2), и R э > R. Для движения автомобиля с недостаточной поворачиваемостью (рис. 9.2, б)по траектории заданного радиуса управляемые колеса необходимо повернуть на больший угол, чем при жестких колесах, так как на повороте он стремится двигаться по кривой большего радиуса, чем определяемый положением передних управляемых колес. Следовательно, автомобиль с недостаточной поворачиваемостью безопасен при движении на повороте, так как у него имеется некоторый резерв «подруливания». Однако

|
управление автомобилем с недостаточной поворачиваемостью на поворотах несколько затрудняется вследствие того, что он поворачивает более полого, чем задано управляемыми колесами.
| Рис. 9.3. Схема движения автомобиля с недостаточной поворачиваемостью при действии боковой силы: v 1, v 2 — векторы скоростей передних и задних колес; О — центр поворота автомобиля |
При действии боковой возмущающей силы Р б(ветер, боковой толчок от неровности дороги) прямолинейно двигавшийся автомобиль с недостаточной поворачиваемостью начинает совершать поворот вокруг центра О (рис. 9.3). Вследствие этого возникает центробежная сила Р ц,поперечная составляющая которой Ру действует в противоположную сторону по отношению к боковой силе Р б.

|
Рис. 9.4. Схемы автомобиля с излишней поворачиваемостью:
а — возникновение углов увода колес; б — движение на повороте; v 1, v 2— векторы скоростей передних и задних колес; О, О 1— центры поворота автомобилей
В результате увод колес уменьшается. Таким образом, автомобиль с недостаточной поворачиваемостью автоматически стремится сохранить заданное прямолинейное движение, т.е. он устойчив и безопасен при прямолинейном движении.

|
Излишняя поворачиваемостъ (рис. 9.4, а)характеризуется тем, что угол увода передних колес меньше, чем задних (δ1 < δ2), и R э < R. Для движения автомобиля (рис. 9.4, б)с излишней поворачиваемостью по траектории данного радиуса управляемые колеса следует повернуть на меньший угол, чем при жестких колесах, так как он на повороте стремится двигаться по кривой непрерывно уменьшающегося радиуса, что может привести к заносу задних колес. Следовательно, автомобиль с излишней поворачиваемостью при движении на повороте не имеет резерва «подруливания» и более опасен, чем автомобиль с недостаточной поворачиваемостью.
| Рис. 9.5. Схема движения автомобиля с излишней поворачиваемостью при действии боковой силы: v 1, v 2 — векторы скоростей передних и задних колес; О — центр поворота автомобиля |
Однако управлять автомобилем с излишней поворачиваемостью на повороте легче, так как он поворачивает на больший Угол по сравнению с заданным Управляемыми колесами.
При действии боковой силы R б двигавшийся прямолинейно автомобиль с излишней поворачиваемостью начинает перемешаться по кривой вокруг центра
поворота О (рис. 9.5). В этом случае поперечная составляющая Р уцентробежной силы Р цдействует в ту же сторону, что и боковая сила Р 6. Увод колес возрастает, что приводит к увеличению центробежной силы. И если не повернуть управляемые колеса в противоположную начавшемуся повороту сторону, то автомобиль будет двигаться по кривой непрерывно уменьшающегося радиуса (по спирали), в результате чего может произойти занос или опрокидывание. Следовательно, автомобиль с излишней поворачиваемо-стью неустойчив при прямолинейном движении и менее безопасен, чем автомобиль с недостаточной поворачиваемостыо.
Дата добавления: 2015-07-10; просмотров: 410 | Нарушение авторских прав