Читайте также:
|
Развитие АСС методом полигонометрии целесообразно производить в закрытой или полузакрытой местности, а также в открытой местности, когда требуется создать опору лишь в узкой прибрежной полосе. При этом решающим условием при выборе метода полигонометрии может оказаться наличие радио- или светодальномеров, а при измерении сторон хода мерными лентами - пригодность местности для линейных измерений. Развитие АСС методом полигонометрии осуществляется проложением разомкнутых ходов или систем ходов с узловыми точками, опирающихся не менее чем на два твердых пункта.
Как исключение, вызываемое условиями обеспечения, допускается проложение замкнутых ходов, опирающихся на один твердый пункт.
В местной системе координат полигонометрические ходы разрешается прокладывать только в виде замкнутых полигонов. Для определения координат начала местной системы и для согласования АСС с картой должна быть осуществлена привязка не менее 3 - 4 пунктов хода к характерным элементам ситуации, надежно опознанным на местности и на карте и равномерно расположенными по длине хода.
Стороны полигонометрических ходов обычно измеряются радио- или светодальномерами. Длина сторон ходов выбирается в зависимости от заданной частоты определения пунктов АСС и условий местности, по которой прокладываются ходы. При этом стороны должны быть не менее 200 м и, как исключение, 150-100 м. Наибольшая длина сторон определяется пределом дальности действия радио- или светодальномеров и заданной точностью измерения сторон. Стороны менее 500 м могут измеряться оптическими дальномерами или мерными лентами.
(Слайд 6) Элементы полигонометрических ходов в каждом конкретном случае определяются, исходя из требуемой точности положения пунктов АСС.
Рассчитывать их можно по следующим формулам:
 |
mß″= ± √(4mсл²- mд² n) / (L²км (8n + 12)) × 106 (1)
 |
mд″= ± (√ (4mсл² - m2ß ″ L²км (8n+12) × 10- 6) / n (2)
 |
mсл= ± 1/2√ (mд² n + m2ß ″ L²км (8n+12) × 10 -6) (3)
где: mß ″ - СКП измерения углов поворота (в сек. дуги);
mд - СКП измерения сторон хода (в метрах);
mсл - CKП положения пункта в слабой части в середине хода (в метрах);
Lкм - общая длина хода (в километрах);
n - число сторон хода.
(Слайд 8) При развитии АСС методом полигонометрии должны соблюдаться следующие допуски:
а) угловая невязка ωα хода не должна превышать:
- для разомкнутых ходов:
 ωα ≤ ± 2,5 √ m2ß ″ n + 2 m 2А ″ (4)
ωα ≤ ± 2,5 √ m2ß ″ n + 2 m 2А ″ (4)
- для замкнутых фигур:
 ωα ≤ ± 2,5 mß″ √ n +1 (5)
ωα ≤ ± 2,5 mß″ √ n +1 (5)
б) СКП измерения сторон хода, рассчитанные по внутренней сходимости результатов измерений, должны быть не более:
 ± √ Σ V² / k (k - 1) ≤ mд (6)
± √ Σ V² / k (k - 1) ≤ mд (6)
в) абсолютная линейная невязка (ωд)хода не должна превышать:
 ωд= ± √ ωх² + ωу² ≤ 4 mсл (7)
ωд= ± √ ωх² + ωу² ≤ 4 mсл (7)
В этих формулах:
mß″ - заданная или рассчитанная СКП измерения углов поворота;
mА″ - CКП исходного азимута;
n - число углов в ходе или фигуре;
mд - заданная или рассчитанная СКП измерения сторон хода;
ΣV² - сумма квадратов отклонений отдельных измерений от среднего значения (для каждой из сторон хода);
ωx, ωy - невязки абсцисс и ординат;
mсл - заданная СКП положения пункта в слабой части в середине хода;
к - число измерений каждой из сторон хода.
В отдельных случаях, когда некоторые допуски окажутся несколько превышенными, измерения могут не повторяться, если будет выполнено основное условие, т.е. если абсолютная невязка хода не будет превышать ω ≤ 4 mсл.
Проектирование и рекогносцировка АСС, развиваемых методом полигонометрии, выполняется тем же порядком, что и при развитии триангуляции с учетом отдельных особенностей.
Трассы ходов выбирают с таким расчетом, чтобы они проходили по местности, наиболее удобной для передвижения, измерения линий и углов.
Разомкнутые ходы должны иметь, как правило, вытянутую форму: углы поворотов должны лежать в пределах от 135° до 225°, а наибольшее отклонение точек хода от прямой, соединяющей исходные точки (в том числе узловые), не должны превышать 1/3 длины хода.
Точки поворота выбирают так, чтобы длина линий между соседними точками не выходила за пределы допустимых. В случае измерения линий лентами трассы ходов прокладываются по местности наиболее благоприятной для линейных измерений. На участках со значительным числом коротких линий передачу дирекционного угла целесообразно осуществлять через несмежные точки хода или через вспомогательную точку, выбранную в стороне хода, как показано на рис. 1.
 Рис. 1
Рис. 1
На выбранных трассах намечают, исходя из поставленных задач обеспечения, места расположения пунктов АСС, а также места расположения боковых пунктов (по сторонам хода), если последние необходимы для решения поставленной задачи. Намеченные пункты закрепляют центрами.
Все точки поворота ходов закрепляют кольями, которые должны возвышаться над землей не более чем на 5 см. В верхний срез кола забивается гвоздь, который является центром точки, и рядом устанавливается «сторожок», на котором пишется номер точки.
ПРИМЕРНЫЕ СХЕМЫ ПОСТРОЕНИЯ ПОЛИГОНОМЕТРИЧЕСКИХ СЕТЕЙ 4 КЛАССА, 1 И 2 РАЗРЯДОВ
1. Система полигонометрических ходов с несколькими узловыми точками

Рис. 2
2. Система полигонометрических ходов с одной узловой точкой (Рис. 3)
3. Одиночный полигонометрический ход (Рис. 4)

Рис. 3. Рис. 4.
Условные обозначения:
 - полигонометрия высших классов
- полигонометрия высших классов
 - исходный пункт триангуляции и исходное дирекционное направление
- исходный пункт триангуляции и исходное дирекционное направление
 - узловая точка
- узловая точка
 - полигонометрический ход
- полигонометрический ход
Полевые измерения в общем случае включают:
- измерение углов поворота;
- измерение длин линий;
- нивелирование линий, если заданием предусмотрено определение высот пунктов;
- определение элементов центрировок и редукций.
Предварительная обработка полевых измерений включает:
- проверку во вторую руку журналов измерения углов и длин линий полигонометрических ходов, а также центрировочных листов;
- составление рабочей схемы ходов;
- вычисление поправок за центровки, редукции и приведение направлений на плоскость проекции Гаусса;
- вычисление приведенных направлений;
- вычисление приведенных длин линий полигонометрического хода.
Приведённые направления получают из учета поправок за центрировку (c″), редукцию (r″) и за приведение на плоскость проекции Гаусса (δ″). Приведённые значения длин линий вычисляют путем исправления измеренных расстояний инструментальными поправками и приведения линий к центрам пунктов, к горизонту, к уровню моря и на плоскость проекции Гаусса.
Уравнивание разомкнутого полигонометрического хода, проложенного между двумя твердыми пунктами с угловой невязкой на этих пунктах, выполняется в следующем порядке:
а) вычисляют угловую невязку ωα хода:
ωα = [To + Σß – 180 (n-1) ] – Tn (3.8)
где: Σß - сумма измеренных углов хода;
n - число измеренных углов хода;
To, Tn - дирекционные углы твердой стороны в начале и конце хода.
Угловая невязка хода не должна превышать допустимой, рассчитанной по формуле (3.4). Полученная угловая невязка ωα, распределяется с обратным знаком поровну на все измеренные углы. При малой величине невязки она распределяется на углы, образованные наиболее короткими сторонами хода;
б) вычисляют по исправленным углам ß дирекционные углы Т линии хода:
Т0-1 = Т0 ± 180º + β0
Т1-2 = Т0-1 ± 180º + β1 (3.9)
Т2-3 = Т1-2 ± 180º + β2
На последнем пункте хода должно получится значение исходного дирекционного угла, что будет являться контролем правильности уравнивания углов;
в) вычисляют приращение координат ∆X и ∆Y точек хода:
 ∆X = D cos T (3.10)
∆X = D cos T (3.10)
∆Y = D sin T
где: D – приведённые длины линий хода;
Т – дирекционные углы линий хода;
г) суммируют полученные приращения координат ∆X и ∆Y и вычисляют невязки координат хода:
 ωx = Σ∆X - (Xn - Xo)
ωx = Σ∆X - (Xn - Xo)
ωy = Σ∆Y - (Yn - Yo) (3.11)
где: Xo, Yo - координаты начального твердого пункта;
Xn, Yn - координаты конечного твердого пункта.
(Слайд 12) Вычисляют абсолютную невязку хода ωд, которая должна удовлетворить основному условию:
 |
ωд = ±√ ωx²+ ωy² ≤ 4mсл (3.12)
Полученные невязки координат ωx и ωy распределяют с обратным знаком на все приращения пропорционально длинам линии (округленными до сотен метров);
д ) вычисляют координаты точек хода путем последовательного прибавления исправленных приращений координат к значениям координат предыдущих точек.
После прибавления последнего приращения должны получиться заданные значения координат конечного твердого пункта. Это является контролем правильности вычисления координат.
(Слайд 12) Уравнивание замкнутого полигонометрического хода, опирающегося на один твердый пункт, выполняется аналогично уравниванию разомкнутого хода. Отличие состоит в том, что угловая невязка замкнутого хода вычисляется по формуле:
ωα = Σ ß - 180° (n – 2) (3.13)
Полученная невязка должна удовлетворять условию (3.5)
Вычисление полигонометрических ходов, развитых в местной системе координат, производится следующим образом:
а)подсчитывают угловую невязку хода ωα по формуле (3.13) и распределяют ее с обратным знаком поровну на все измеренные углы;
б) вычисляют по исправленным углам дирекционные углы линий хода, приращения координат и невязки координат. Полученные невязки распределяют с обратным знаком на все приращения пропорционально длинам линий (3.9 – 3.11);
в) вычисляют приближенные координаты точек хода. Вычисление начинают от одной из точек, координаты которой определены привязкой к крупномасштабной топографической карте;
г) для точек, геодезически привязанных к карте, образуют разности координат, определенных привязкой и полученных вычислением. Из всех разностей (отдельно для абсцисс и ординат) выводят средние значения; уклонения отдельных разностей от среднего значения не должны превышать 100 м.;
д) вычисляют в местной системе координаты точек полигонометрического хода, согласованные с картой, прибавляя к приближенным координатам полученные средние значения разностей абсцисс и ординат.
Расчет географической дальности видимости маяка.
МАЯК
МАЯК
сооружение в виде башни, располагаемое в судоходных водах или на суше вблизи них. Он служит видимымориентиром днем и испускает непрерывный свет или световые вспышки ночью, чтобы предупредить моряковоб опасностях и помочь им в определении безопасного курса судна. Очень важна идентификация каждогомаяка, в том числе координаты его местоположения. Маяки опознаются по характерному очертанию башни(днем) и по отличительным изменениям яркости света, его цвету, характеру световых импульсов маячныхогней и т.д. (ночью).
ДАЛЬНОСТЬ ВИДИМОСТИ
(Visibility) — различаются две Д. В. — географическая, зависящая от сферической формы земли, и оптическая, зависящая от источника света. Известно, что сила света убывает пропорционально квадратурасстояния; наступает критическая дальность, при которой источник света становится невидимым для глаза.Определив предел Д. В. определенного источника света для нормального по зоркости глаза, получим оптическую Д. В. данного источника света (маяка). С другой стороны, из-за шаровидности Земли свет отсамого мощного источника не может быть виден всегда с расстояния его оптической Д. В., а будет видентолько с того расстояния, которое будет зависеть от высоты источника света; такая Д. В. называется географической. Вполне понятно, что практическое значение для мореплавателей имеет географическая Д.В., хотя у некоторых маяков она меньше оптической. На морских картах указывается наименьшая изгеографической или оптической Д. В. маячного огня при условии ясной погоды и прозрачной атмосферы.Практические сведения о Д. В. маяков даются в "Описаниях маяков".
Дальностью видимости называется наибольшее расстояние, с которого глазу наблюдателя становится видимым наблюдаемый объект.
Различают географическую и оптическую дальности видимости.
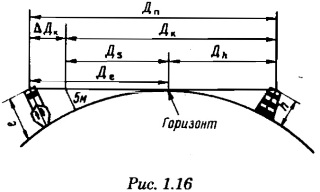
Географическая дальность видимости — дальность открытия ночью маячного огня, днем башни маяка или знака — зависит от кривизны земли, рефракции атмосферы и высоты огня, башни или знака над уровнем моря (рис. 21). Дальность открытия при высоте глаза наблюдателя, равной 5 м определяется по формуле

где L — дальность открытия в морских милях; Н — высота маяка или знака в метрах над уровнем моря; 2,08 и 4,65 — постоянные коэффициенты.
Дп = 2,08√ h + 2,08√ e = 2,08 (√ h + √ e) (18)
Дата добавления: 2015-09-04; просмотров: 103 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Знаки навигационных створов и их типовые проекты. | | | Picture captures a billion stars |