Читайте также:
|
Поразительная точность и верность чувства осязания у человека едва ли может быть достигнута в конструкции робота. Однако существует несколько типов простых датчиков, которые можно использовать для обнаружения прикосновения и давления. Датчики прикосновения обычно используются в роботах для обнаружения препятствий на пути следования, что позволяет роботу избегать столкновений.
Более совершенные датчики прикосновения и давления используются в конструкциях рук и кистей. Такие датчики позволяют «руке» робота захватывать и удерживать предметы с достаточным усилием без риска их повреждения. Простой датчик прикосновения и давления можно изготовить из электростатического (проводящего) поролона. Подобный поролон используется при упаковке ИС для защиты их от статического электричества. Такой поролон обладает определенной электрической проводимостью, которая изменяется при сжатии.
Необходимо использовать неплотный (мягкий) тип поролона, поскольку он имеет пористое строение и обладает достаточной гибкостью. При нажатии поролон сжимается, что приводит к изменению сопротивления между наложенными на него электродами.
На рис. 5.38 приведен чертеж простого датчика давления. Проводящие пластины (электроды) могут быть изготовлены из фольгированного материала для печатных плат, алюминиевой фольги или чего-то подобного. Более точные датчики касания и давления будут рассмотрены в этой главе ниже.
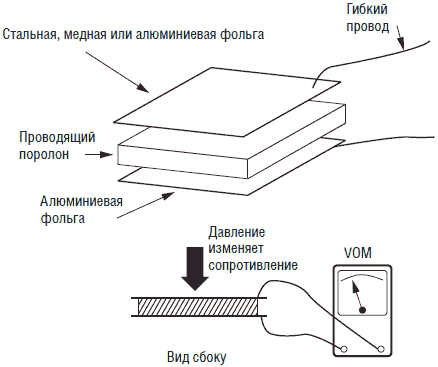
Рис. 5.38. Датчик давления на базе проводящего поролона
Дата добавления: 2015-08-17; просмотров: 73 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Настройка КМОП-компаратора | | | Датчики изгиба |