Читайте также:
|
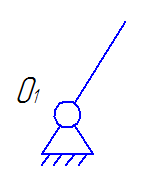
Рассматриваемый механизм относится к плоским зубчато-рычажным механизмам и состоит из кривошипов 1 и 5, выполненных заодно с шестернями, шатунов 2,6 и 3 и ползуна 4, соединенных между собой и стойкой, 8 низшими кинематическими парами (7 вращательными и 1 поступательной).
Степень подвижности плоского механизма можно определить по формуле
 ,
,
где n - число подвижных звеньев,
 - количество низших кинематических пар,
- количество низших кинематических пар,
 - количество высших кинематических пар.
- количество высших кинематических пар.
Для проведения структурного анализа произведем замену высшей пары на дополнительное звено и 2 низшие пары. Рассматриваемый эквивалентный механизм можно считать состоящим из начальной группы (стойка-кривошип1) и групп Ассура с нулевой подвижностью:
1. (2,6) ВВВ

2. (4,3) ВВП

3. (0,1;0,5) Начальные звенья

Формула построения механизма:

Класс механизма: 
СИНТЕЗ МЕХАНИЗМА И ПОСТРОЕНИЕ ПЛАНА ПОЛОЖЕНИЙ
Строим механизм в заданном положении звеньев и соединяем точки B и C, определяя длину звена B и C. Далее ее делим окружности зубчатых колес на 12 равных частей и нумеруем точки A и B, учитывая что колеса вращаются в разные стороны. Из точек A и B радиусами  и
и  делаем засечки, определяя положения точек C, и строим траекторию движения точки C. Выбираем из заданного условия длину звена CD и ось перемещения ползуна. Из точек C, радиусом
делаем засечки, определяя положения точек C, и строим траекторию движения точки C. Выбираем из заданного условия длину звена CD и ось перемещения ползуна. Из точек C, радиусом  делаем засечки на этой оси и определяем положения точек D и шатуна CD.
делаем засечки на этой оси и определяем положения точек D и шатуна CD.
Длины звеньев:
 ;
;  ;
; 
Массы звеньев:
 ;
;  ;
; 
Планы скоростей и определение средней угловой скорости начального звена
Средняя угловая скорость кривошипа  вычисляется через среднюю частоту вращения вала кривошипа
вычисляется через среднюю частоту вращения вала кривошипа 

Скорости точек A и B кривошипов и 5 направлены перпендикулярно кривошипам в сторону их вращения и равны:
 ;
; 
Определим масштабный коэффициент:


Точка C принадлежит звеньям 2 и 6,совершающим плоское движение поэтому скорость этой точки можно определить из уравнений:

Скорость точки D определим из уравнения:

Для построения плана скоростей из полюса плана проводим векторы перпендикулярные кривошипам 1 и 5. Длины векторов пропорциональны длинам звеньев. Из точек " a " и " b "проводим направления скоростей  и
и  направленные перпендикулярно АВ и ВС. В пересечении получаем точку " c ". Из точки " с " проводим направление скорости
направленные перпендикулярно АВ и ВС. В пересечении получаем точку " c ". Из точки " с " проводим направление скорости  , перпендикулярное CD, а из полюса P – направление скорости точки D (по вертикали). В пересечении получаем точку “ d “. Положение точек соответствующих центрам масс звеньев определяем из подобия и соединяем их с полюсом.
, перпендикулярное CD, а из полюса P – направление скорости точки D (по вертикали). В пересечении получаем точку “ d “. Положение точек соответствующих центрам масс звеньев определяем из подобия и соединяем их с полюсом.
Дата добавления: 2015-08-02; просмотров: 50 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ВВЕДЕНИЕ | | | ПРИВЕДЕНИЕ СИЛ |