Читайте также:
|
Движение вертолета относительно земной поверхности будем рассматривать в СК  .
.
Фюзеляж вертолета можно рассматривать как твердое тело, подвешенное к винту-носителю, который в свою очередь создает равнодействующую силу T.
Эта сила прикладывается к втулке несущего винта и направленная вверх по оси тюльпана несущего винта (тюльпаном несущего винта называется коническая поверхность, которая образуется лопастями при вращении).

рис. 10.1

рис. 10.2
Изменение равнодействующей силы T создается циклическим изменением углов наклона лопасти несущего винта. Осуществляется с помощью автомата перекоса.
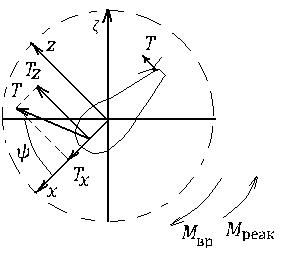
рис. 10.3
Усилия, которые создаются винтом, должны быть скомпенсованы реактивным моментом.
Управление вертолетом в полете осуществляется ограниченным количеством органов управления.
Физически, для вертолета необходимо создать четыре независимых уравнения:
1) для вертикального управления – описывает изменение положения вертолета в пространстве по вертикали, путем изменения модуля равнодействующей силы T (наклон лопасти винта – шаг винта);
2) путевое управление – определяет положение вертолета в пространстве относительно вертикальной оси, позволяет пилоту направлять нос вертолета в любом желаемом направлении в горизонтальной плоскости;
3) поперечное управление – включает пременение как моментов, так и усилий путем отклонения вектора тяги T (в результате наклона возникает составляющая вектора тяги T, которая начинает действовать в направлении крена);
4) продольное управление – аналогично поперечному (моменты тангажа возникают одновременно с возникновением силы проколов).
Предположения, которые используют при выведении уравнений движения:
· сила и моменты, действующие на вертолет, определяются из гипотезы стационарности;
· направление равнодействующей силы тяги совпадает с направлением оси конуса несущего винта;
· лопасти винта считаются абсолютно жесткими на изгиб и на кручение.
Уравнение движения вертолета получим аналогично уравнениям движения самолета. Так для продольного движения вертолету запишем следующую систему:


 (10.1)
(10.1)


 – угловая скорость вокруг вертикальной оси;
– угловая скорость вокруг вертикальной оси;
 ,
,  – возмущ. внешние усилия;
– возмущ. внешние усилия;
 – возмущенный момент по оси Z;
– возмущенный момент по оси Z;
 – продольная сила несущего винта.
– продольная сила несущего винта.
Система дополнена четвертым уравнением характеризующим вращательное движение вокруг вертикальной оси связанной СК

рис. 10.4
Дата добавления: 2015-08-02; просмотров: 31 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| СВЕДЕНИЯ ПО АЭРОДИНАМИКЕ ВЕРТОЛЕТОВ | | | ГЛАВА XIII Почему говорится, что Пророк Исаия был очищен Серафимом? |