Читайте также:
|
В тех случаях, когда паспортная грузоподъемность имеющихся в наличии крахов недостаточна для подъема аппарата данной массы применяются различные способы временного повышения грузоподъемности и высоты подъема кранов:
1) временное расчаливание стрелы крана;
2) установка на кране противовесов, балансирующих грузовой момент;
3) опирание стрел двух кранов на ригель;
4) опирание стрел на опорные стойки и др;
5) подъем поворотом вокруг шарнира с использованием опорной стойки и др.
1) Госпроматомнадзор разрешает применять самоходные стреловые краны с временно расчаленными стрелами при условии выполнения монтажных и погрузочно-разгрузочных работ в соответствии с проектом производства работ, разработанным специализированной организацией, в котором содержатся указания по обеспечению безопасного производства работ.
Самоходным стреловым краном с маневренной расчаленной стрелой (рисунок 4) можно выполнять подъем и опускание груза, изменение вылета крюка и поворот платформы с грузом на крюке в секторе обслуживания (области, образованной продолжением горизонтальных проекций ветвей расчалки).
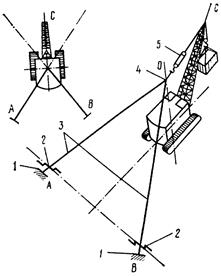
Рисунок 4 — Схема самоходного стрелового крана с маневренной расчаленной стрелой:
1 — наземные якоря; 2 — регулировочные лебедки; 3 — ветви расчалки; 4 — соединительная траверса; 5 — полиспаст расчалки.

Рисунок 5 — Графики возможного увеличения максимальной грузоподъемности самоходных кранов с расчаленными стрелами при минимальном вылете крюка: а — крана МКГ-25; б — крана СКГ-40 (lстр,lяк — соответственно длина стрелы и якоря).
Угол наклона плоскости расчалки к горизонту и расстояние от шарнира стрелы крана до центра заложения наземных якорей определяют по графику возможного увеличения максимальной грузоподъемности крана с расчаленной стрелой G1/G2 (здесь G1 — грузоподъемность крана в обычном режиме работы; G2 — грузоподъемность крана с расчаленной стрелой). Графики (рисунок 5) составлены для условия горизонтальной установки крана и расположения равнодействующей усилия в расчалке в вертикальной плоскости, проходящей через ось стрелы крана.
Временное расчаливание стрелы крана обеспечивает увеличение грузоподъемности по сравнению с паспортной на 20-100%. Временное расчаливание стрелы может быть неманевренным и маневренным. Неманевренное расчаливание обеспечивает возможность только поднимать груз и изменять вылет стрелы; маневренное позволяет дополнительно осуществлять поворот стрелы с грузом на крюке на угол 130-150°.
Передвижные противовесы, служащие для повышения устойчивости крана, закрепляются на рычаге, соединенном шарнирно с платформой крана и связанном с грузовым канатом и стрелой крана.
3) Подъем оборудования спаренными кранами со стрелами, соединенными ригелем, выполняют в условиях, когда масса оборудования превышает суммарную паспортную грузоподъемность кранов. При этом груз поднимают с использованием балансирных устройств.
Ригель изготовляют из труб 273 X 10 мм по чертежам ВНИИмонтажепецетроя.
До начала подъема краны устанавливают по оси фундамента, а поднимаемый груз так, чтобы место его строповки располагалось на оси фундамента. Подъем осуществляют кранами с заторможенными механизмами поворота. В процессе подъема груза низ его следует плавно перемещать на санях или тележках с помощью подтаскивающей системы так, чтобы отклонения грузовых полиспастов кранов от вертикали не превышали 1°. Опорную часть аппарата при отрыве от основания удерживают от раскачивания тормозной оттяжкой.
При опирании стрел двух кранов на ригель потеря устойчивости кранов в плоскости расположения стрел исключается. Плоскость подъема аппарата располагается перпендикулярно плоскости расположения стрел. Для того, чтобы исключить появление дополнительных усилий на краны, место строповки аппарата располагается строго по оси фундамента, совпадающей с плоскостью расположения стрел кранов.
Подъем аппарата осуществляется грузовыми полиспастами.
4) При опирании стрел кранов на опорные стойки грузоподъемность кранов повышается по сравнению с паспортной в полтора раза. В качестве опорных стоек используются шевры. Для уменьшения просадки грунта под шевры укладывается шпалы или инвентарные щиты. Подъем аппарата осуществляемся при натянутых стреловых полиспастах. При натяжении стреловых полиспастов проводится подъем шевров таким образом, чтобы между основанием шевров и опорной поверхностью образовался зазор 30 мм. Этот зазор после погружения шевра позволяет передать часть нагрузки на стрелу крана. При подъеме опорная часть аппарата подтягивается с помощью лебедки и тягового полиспаста.
Для подъема тяжелых аппаратов, высота которых превышает высоту - подъема крана используют метод подъёма с использванием опорной стойки (поворотом вокруг шарнира).
До начала монтажа на аппарате укрепляется опорная стойка, которая через шарнир крепится к бандажу, устанавливаемому на корпусе аппарата. К основанию аппарата крепится тяга.
Подъем осуществляется в два этапа. На первом этапе аппарат приподнимается на угол 30-40°, величина которого определяется высотой подъема кранов. Опорная стойка соединяется с тягой и образует жесткий треугольник, при этом нижний конец опорной стойки упирается через опорный башмак в грунт, а угол между осями аппарата и опорной стойки должен быть не менее 90°. В плоскости подъема опорная стойка удерживается боковыми оттяжками.
На втором этапе подъема краны (уравнительная траверса, подвешенная к полиспастам кранов) стропятся за нижний конец опорной стойки и осуществляют перевод аппарата в вертикальное положение. В положении неустойчивого равновесия в работу включается тормозная оттяжка.
Данный метод используется также для подъема аппаратов в стесненных условиях, когда невозможно применить дотягивающие средства.
При необходимости можно применять несколько опорных стоек, соединенных между собой на шарнирах.
В стесненных условиях при монтаже оборудования, масса которого значительно превышает паспортную грузоподъемность имеющихся кранов, следует применять подъем методом скольжения с помощью кранов со стрелами, опирающимися на А-образные шевры. Особенностью этого метода является возможность подъема оборудования и конструкций, высота которых может почти в 2 раза превышать высоту подъема крюков крана. Шевры для опирания стрел кранов МКГ и СКГ изготовляют из труб 426 Х 10 мм по чертежам ВНИИмонтажспецстроя. Для более равномерного распределения давления на грунт под основание шевра укладывают шпалы или инвентарные щиты. Груз поднимают кранами при заторможенных механизмах поворота, натянутых стреловых полиспастах и включенных ограничителях грузового момента.
При пробном нагружении кранов путем отрыва головной части поднимаемого груза от основания следует проверить с помощью уровня величину просадки каждой из ног опорных шевров. Для ног шевра высотой 25 м разница в просадке не должна превышать 5 мм.
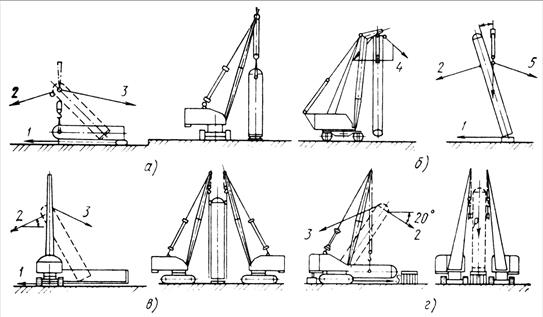
Рисунок 9 — Схемы подъема аппаратов стреловыми кранами методом скольжения:
а — одним краном строповой за вершину, б — одним краном строповой на ⅔ высоты корпуса, в — спаренными кранами без их передвижения, г — спаренными кранами с их передвижением; 1 — канаты подтаскивания, 2 — тормозные оттяжки, 3 — поддерживающие расчалки, 4 — боковая расчалка, 5 — дотягивающий канат; стрелки показывают направление усилий
Подъем вертикального аппарата одним краном методом скольжения со строповкой за корпус по образующей показан на рисунке 9, б. В результате такой строповки аппарат после отрыва от земли занимает наклонное положение, при этом угол отклонения оси аппарата от вертикали составляет не более 15°. Схему применяют при значительной высоте и небольшом диаметре аппарата, любой высоте фундамента и при наличии крана, грузоподъемность которого на необходимом вылете стрелы не меньше массы аппарата. Достоинство схемы заключается в возможности подъема и установки аппаратов, высота которых превышает высоту подъема крюка крана; недостаток — сложная установка поднятого в наклонном положении аппарата на фундаментные болты.
При монтаже аппарат поднимают над уровнем земли на 0,2 м и поворотом стрелы крана помещают аппарат рядом с фундаментом. В процессе поворота стрелы крана аппарат за опорную часть разворачивают в плане с помощью оттяжки. Затем аппарат поднимают над анкерными болтами на 0,2 м и совмещают край опорной части аппарата с осью фундамента. В таком положении аппарат оттяжкой доводят до вертикального положения. Затем, плавно отпуская тормозную оттяжку, аппарат устанавливают в проектное положение, придерживая его от боковых смещений краном.
Схему подъема вертикального аппарата спаренными кранами без их передвижения методом скольжения (рисунок 9, б) применяют при небольшой высоте аппарата. Такой аппарат следует стропить за верхнюю часть с помощью балансирной траверсы, длина плеч которой обеспечивает необходимое распределение нагрузок между кранами.
При большой высоте аппарата и низком фундаменте в подготовительный период аппарат располагают в исходном положении таким образом, чтобы места его строповки находились на оси фундамента. Место строповки аппарата большой высоты следует располагать возможно ближе к центру тяжести аппарата, что уменьшает неравномерность нагрузки на краны.
Аппарат из горизонтального положения поднимают без отрыва от земли в положение, близкое к вертикальному, плавной одновременной работой механизмов подъема кранов и механизмов, подтаскивающих аппарат, обеспечивая вертикальность грузовых полиспастов кранов. Перед подходом аппарата к вертикальному положению натягивают заднюю тормозную оттяжку. Постепенно отпуская тормозную оттяжку, переводят аппарат в вертикальное положение. Затем аппарат поднимают на 0,2 м выше верха фундаментных болтов и последовательным поворотом платформ кранов устанавливают в проектное положение.
Подъем вертикальных аппаратов методом скольжения спаренными кранами с их передвижением (рисунок 9, г) производят аналогично описанному выше. Аппарат, поднятый с земли на 0,2 м выше фундаментных болтов, одновременным перемещением кранов переводят до совмещения его оси с осью фундамента. Затем аппарат опускают, выверяют и закрепляют фундаментными болтами.
Подъем вертикальных аппаратов кранами методом поворота вокруг шарнира заключается в том, что можно монтировать аппараты, масса которых превышает грузоподъемность кранов.
Применение этого метода ограничивается высотой поднимаемых аппаратов и отметкой верха фундамента. Аппараты монтируют в соответствии с одной из схем, приведенных на рисунке 10. На рисунке 10, а показан монтаж аппарата одним краном с поворотом стрелы. Этот метод может быть применен в случае, когда высота аппарата не превышает высоты подъема крюка крана. Нижняя часть аппарата опирается на шарнирное устройство.
Шарнир устанавливают так, чтобы его ось была перпендикулярна плоскости подъема аппарата и располагалась в горизонтальной плоскости. При подъеме вертикальных аппаратов методом поворота вокруг шарнира для их крепления к фундаментам применяют фундаментные болты разъемной конструкции.
На рисунке 10, б показан монтаж аппаратов с перемещением крана в процессе подъема. Этот метод применяется, когда из-за высоты аппарата его невозможно установить с первой стоянки крана.
На рисунок 10, в приведен монтаж аппарата спаренными кранами с одной стоянки кранов без их перемещения, а на рисунке 10, г — с перемещением кранов в процессе подъема аппарата.
Самоходные монтажные краны максимальную грузоподъемность имеют при минимальной длине стрелы. С увеличением длины стрелы уменьшается грузоподъемность кранов, следовательно, удлинение стрел сокращает возможности монтажных кранов.

Рисунок 10. Схема подъема аппаратов методом поворота вокруг шарнира (а... г):
I... IV — положения аппаратов в процессе подъема

Рисунок 11 — Основные способы подъема аппаратов кранами со специальной оснасткой:
а — краном с расчаленной стрелой, б — спаренными кранами с опирающимися стрелами. в — спаренными кранами со стрелами, соединенными ригелем, г — краном с использованием разгрузочного устройства; 1 — якорь, 2 — расчалка, 3 — кран, 4 — аппарат, 5 — стойки, 6 — ригель. 7 — полиспаст. 8 — контргруз, 1 — подпорка
Этим способом можно устанавливать аппараты в проектное положение методом скольжения с отрывом и без отрыва от земли в стесненных условиях на невысокие фундаменты (до 3 м). При этом краны выполняют только две операции: подъем и опускание груза. Использование кранов со стрелами, опирающимися на стойки, для подъема конструкций или аппаратов методом поворота исключено.
5) Одной из наиболее перспективных схем монтажа оборудования является подъем вертикальных аппаратов и конструкций самоходными кранами с использованием подпорки и полиспаста (рисунок 12). Благодаря подпорке и изменяющемуся по длине полиспасту возможен подъем аппаратов и конструкций, длина и масса которых значительно превышают грузовысотные характеристики кранов.
При использовании этого способа применяют две схемы подъема вертикальных аппаратов. В первом случае (рисунок 12, а) аппарат устанавливают в проектное положение с подпоркой и со стяжкой АВ неизменяемой длины, т. е. в процессе подъема треугольник АВС по форме не изменяется, при этом звено АВ может быть гибким и жестким. Во втором случае аппарат устанавливают в проектное положение с подпоркой и полиспастом (рисунок 12, б). В отличие от предыдущей схемы вместо постоянного по длине звена АВ установлен полиспаст (звено, изменяемое по длине), и треугольник АВС при подъеме изменяется.

Рисунок 12 — Схемы подъема оборудования кранами с использованием подпорки и стяжки (а), подпорки и полиспаста (б)
В первом варианте подъем осуществляется в такой последовательности. С помощью кранов поднимаемый аппарат поворачивают относительно опорного шарнира на максимальный угол к горизонту, который соответствует максимальной высоте подъема крюков. Звеном АВ фиксируют подпорку в исходном для подъема положении, освобождают краны от оголовка аппарата и таким образом нагрузку, удерживающую аппарат под углом, переносят на низ подпорки В (рисунок 12, а). Затем устанавливают краны для окончательного подъема аппарата. Дальнейший подъем происходит за счет подъема низа подпорки, прикрепленной к крюкам кранов.
Более универсальным является второй вариант. По этой схеме возможны маневрирование стрелами кранов и передвижение кранов с одновременным сокращением длины распорки. Этот вариант позволяет осуществить подъем аппарата: одновременным движением крана и сокращением длины полиспаста; поворотом стрелы и сокращением длины полиспаста; изменением вылета стрелы и сокращением длины полиспаста; подъемом крюка и совмещением с любой из перечисленных операций. При подъеме с использованием указанной схемы наилучшим является вариант, при котором горизонтальное перемещение крюка происходит в начале подъема аппарата, т. е. когда низ подпорки находится от земли на минимальном расстоянии.

Рисунок 5 — Тракторный кран МКТ-6 (а) и кран-трубоукладчик
ТЛ-4 (б):
1 — трактор, 2 — стрела, 3 — механизм привода крана. 4 — стойки, 5 — противовес
Дата добавления: 2015-08-10; просмотров: 73 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Подъем на высотные отметки | | | Нагнетание воздуха при помощи турбокомпрессора |