|
Читайте также: |
Цель статического расчета – определение условий устойчивости экскаватора во всех возможных случаях его эксплуатации. Устойчивость достигается соответствующим сочетанием масс механизмов, оборудования и металлоконструкций.
В задачу статистического расчета входит: уравновешивание поворотной платформы, определение противовеса и проверка общей устойчивости экскаватора, а также определение реакций опорных катков платформы, захватов и центрирующей цапфы.
Поворотная платформа находится в равновесии при условии, что результирующая сил тяжести поворотной части экскаватора не выходит за пределы опорного периметра, проходящего через срединные точки линий контактов катков с опорным кругом катания при повороте платформы. Это же условие служит основанием для определения минимального веса противовеса. Его рассчитывают для оборудования экскаватора прямой лопатой и проверяют для других видов рабочего оборудования.
Расчет производится для двух положений загрузки ковша: первый соответствует возможности выхода результирующей сил тяжести поворотной части экскаватора за пределы опорного периметра в сторону противовеса (назад).
Возможность опрокидывания вперед поворотной платформы экскаватора, оборудованной прямой лопатой проверяют для положения, когда стрела наклонена под углом к горизонту на 30-400, рукоять горизонтальна и выдвинута на 2/3 своего хода, ковш наполнен грунтом, рабочее оборудование расположено вдоль гусениц.
При этом вес противовеса Gвпр можно определить из уравнения равновесия относительно точки В (рис. 5.24 а):
 ; (5.37)
; (5.37)
Возможность опрокидывания поворотной платформы назад проверяют для положения, при котором стрела наклонена под углом 55-600 к горизонту рукоять вертикальна, ковш без грунта находится у пяты стрелы и оперт на грунт. Значение Gнп р находят из уравнения моментов сил относительно точки А (рис. 5.24 б):

 ; (5.38)
; (5.38)
Принятый вес Gф находится из уравнения:
Gнпр< Gф>Gвпр; (5.39)
При проверке противовеса обратной лопаты для случая опрокидывания вперед предполагают, что груженый ковш вышел из забоя и экскаватор начинает поворачиваться на выгрузку. Для случая опрокидывания платформы назад предполагают, что ковш при максимальном вылете рукояти опущен на землю, его масса полностью воспринимается грунтом, а на платформу действует половина веса рукояти и стрелы. Для обоих случаев составляют уравнения моментов сил относительно точек А и В.
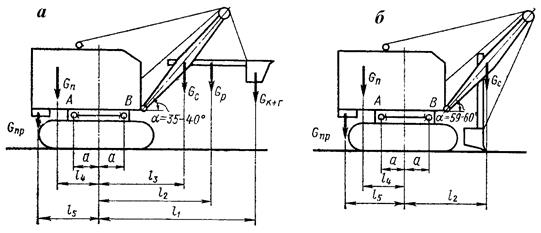
Рис. 5.24 Схема к определению веса противовеса при рабочем оборудовании прямая лопата: а – случай опрокидывания вперед; б – то же, назад.
Противовес при оборудовании драглайна проверяют по тем же зависимостям, что и для прямой лопаты. При проверке на опрокидывание вперед считается, что груженый ковш поднимается, стрела наклонена к горизонту на угол 300, при опрокидывании назад - ковш опущен на грунт, угол наклона стрелы составляет 45-500.
Общую устойчивость экскаватора с прямой лопатой проверяют при двух рабочих и двух транспортных положениях. Одно из рабочих положений соответствует самому неблагоприятному случаю работы, второе – преодолению препятствий в грунтовом массиве. В транспортных положениях проверка выполняется для преодоления наибольшего заданного подъема и спуска по максимальному заданному уклону.
Наиболее неблагоприятный случай производства работ соответствует положению ковша, при котором его режущая кромка находится на уровне оси напорного вала, ковш наполнен грунтом, рукоять выдвинута к горизонту под углом 35-400, рабочее оборудование расположено поперек гусениц, работа происходит на горизонтальной площадке (рис. 5.25).
Устойчивость оценивают коэффициентом устойчивости Ку, определяемым по формуле:
 ; (5.40)
; (5.40)
где ΣМу – сумма моментов сил, удерживающих экскаватор от опрокидывания; ΣМ0 – сумма моментов сил, опрокидывающих экскаватор.
Коэффициент рабочей устойчивости определяют из уравнения равновесия сил, действующих на машину относительно точки А.
Для универсальных одноковшовых экскаваторов с прямой лопатой Ку=1,05…1,1.
Расчет на преодоление препятствия в грунтовом массиве выполняют при следующих условиях: рабочая площадка горизонтальна, стрела наклонена под углом 450 к горизонту, подъемный канат – вертикальный, рабочее оборудование расположено поперек гусениц, касательная к траектории резания реакция грунта – максимальная, а параллельная к траектории резания реакция грунта равна нулю.
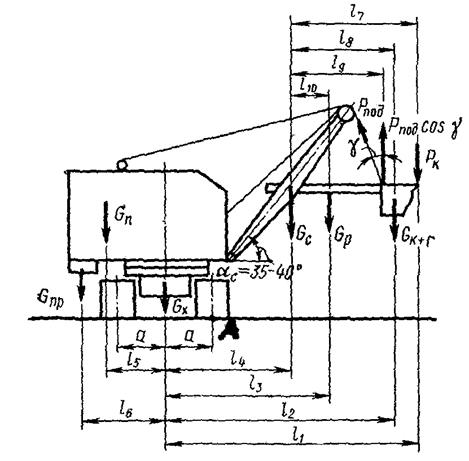
Рис. 5.25 Схема к определению рабочей устойчивости экскаватора, оборудованного прямой лопатой.
Касательная к траектории копания реакция грунта Рк зависит от максимального подъемного усилия Рпод и определяется из условия равновесия всех сил, действующих на ковш без грунта и рукоять относительно оси напорного вала.
Усилие Рпод при однодвигательном приводе определяется исходя из передачи всей мощности двигателя на подъем, а при многодвигательном приводе соответствует стопорному моменту на валу подъемного двигателя.
Устойчивость экскаватора для случая преодоления наибольшего подъема проверяется при условии, что рабочее оборудование направлено в сторону перемещения экскаватора, стрела наклонена под минимальным рабочим углом к поверхности площадки, рукоять выдвинута полностью, ковш без грунта находится у земли, направление ветра встречное с давлением р= 0,25 кПа, Ку= 1,2.
Для случая движения под уклон устойчивость проверяется при максимальном угле наклона стрелы к поверхности площадки, свободно висящей рукояти и такими же положениями ковша, давлением и направлением ветра и запасом устойчивости, как и в предыдущем случае.
Общую силу от действия ветра определяют по формуле:
 ; (5.41)
; (5.41)
где F – наветренная площадь стрелы и кабины, м2.
Устойчивость обратной лопаты проверяют по двум расчетным схемам. В первом случае предполагает, что ковш встретил непреодолимое препятствие при выходе из забоя. Тяговый барабан при этом заторможен, и вся мощность двигателя расходуется на подъем рабочего оборудования.
Второе расчетное положение соответствует разгрузке липкого грунта на максимальном вылете ковша.
Устойчивость драглайна проверяют в положении, соответствующим повороту его на выгрузку. Угол наклона стрелы принимают равным 25-300. При этом ковш наполнен грунтом и подтянут к голове стрелы, экскаватор работает на уклоне с углом 3-50. Кроме весовых и ветровой нагрузок дополнительно учитываются силы инерции стрелы и ковша с грунтом.
Реакции опорных катков, захватов и центрирующей цапфы определяют при оборудовании прямой лопатой, когда реакции наибольшие. Расчет ведут по наиболее неблагоприятному случаю, возникающему при направлении стрелы в плане на угол гусениц, угол наклона стрелы при этом принимается наименьшим.
Дата добавления: 2015-07-20; просмотров: 418 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Общий расчет главных рабочих механизмов. | | | Производительность одноковшовых экскаваторов. |