Читайте также:
|
Структурная схема системы регулирования с цифровым контроллером
 Рассмотрим дискретное представление закона работы непрерывного регулятора
Рассмотрим дискретное представление закона работы непрерывного регулятора
 Если время подвергнуть процедуре квантования, а ошибкой округления в АЦП пренебречь, то исходное уравнение регулятора можно преобразовать в разностное.
Если время подвергнуть процедуре квантования, а ошибкой округления в АЦП пренебречь, то исходное уравнение регулятора можно преобразовать в разностное.
 .
.
Такой алгоритм реализации ПИД- регулятора называют позиционным или нерекурсивным. В любой момент вр. положение ИМ (позиция) должно соответствовать числу на выходе цифрового фильтра, а в памяти регулятора запоминаются все предыдущие значения сигнала рассогласования. Т.к. цифровой регулятор это устр-во реал. вр., то при программной реализации алгоритма могут возникнуть явления, связанные с переполнением разрядной сетки («залипание»). В связи с этим алгоритмы реальных контроллеров строятся по другой сх.
Значения вых. сигнала регулятора в предыдущий момент времени
 , тогда
, тогда
 , или
, или
 ,
,
 .
.
Получаем разностный (скоростной) алгоритм, использующий рекурсию, так как на текущем шаге вычисляется приращение к предыдущему. Z-передаточная функция такого алгоритма ПИД регулятора равна
 Схема виртуального фильтра алгоритма приведена на рис. 2. Такие фильтры принято называть БИХ фильтры (фильтры с бесконечной импульсной характеристикой). В алгоритмах с БИХ снимается проблема инициирования и «залипания».
Схема виртуального фильтра алгоритма приведена на рис. 2. Такие фильтры принято называть БИХ фильтры (фильтры с бесконечной импульсной характеристикой). В алгоритмах с БИХ снимается проблема инициирования и «залипания».
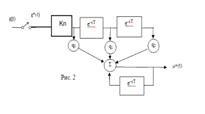
Разностные алгоритмы-фильтры с бесконечной импульсной характеристикой.
Дата добавления: 2015-10-21; просмотров: 139 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Вопрос 14.15. Аналоговый регулятор с позиционным управляющим сигналом. Аналоговый регулятор с импульсным управляющим сигналом. | | | Вопрос 17. Модификация дискретных алгоритмов типовых регуляторов. |