|
Читайте также: |
Р/м микропроцессорные технические комплексы, применяемые для централизованных АСУТП. Для реализ-децентрализов. АСУТП выполняются универсальные микропроцессорн. Программно-технич. Комплексы различных классов. Каждый класс рассчитан на определенный объем обрабатываемой информ-ции и выбор выполняемых функций.
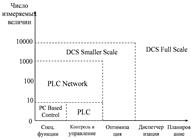
1. контроллеры на базе ПК (платы) (в медицине, в научных лабораториях, средствах коммуникаций. Сложная обработка измерительной информации).
Б) средства автоматизации работы в среде, не сильно отличающейся от конторской. Регулируемые контроллером ф-ии целесообразно в силу их нестандартности программировать на обычных языках программирования невысокого уровня.
2. Программируемые логические или локальные контроллеры (РLC) могут быть выполнены в двух модификациях: встраиваемые в оборудование и технич средства в защитном корпусе. Обладают высокой надежностью, живучестью. Для работы таких контроллеров разработаны методы резервирования и полной диагностики.
3. Сетевой комплекс контроллеров. Класс наиболее широкого применения во всех областях промышленности. Сетевой комплект имеет определенные ограничения, связанные со сложностью выполнения функций.
4. DCS малого масштаба.
5.распределенные системы управления полномасштабные.
Такая классификация носит условный хар-р. Четких границ между классами ПТК нет, поэтому в силу открытости отдельных частей систем при решении задачи СУ можно компоновать между типовыми промышленными системами и создавать СУ из сочетаний отдельных компонентов, выпускаемых различными фирмами.
Для того чтоб иметь определенный стандарт по программированию контроллеров международ. электротехнич. комиссия разработала стандарт по требованиям к промышленным контроллерам МЭК 61131. Он состоит из частей:1
1. Общая информация
2.требования к оборудованиям и тестам.
3.языки программирования
4.руководство пользователя.
5. спецификация сообщений
6. промышленные сети
7. программирование с нечеткойлогткой
8. руководящие принципы применения и реализации программируемых локальных контроллеров
IEС 61131-3 –стандарт предполагает 5 языков программирования.
Использ данного стандарта полностью соответствует концепции открытых систем, а именно, делает программу для контроллера независимой от конкретного оборудования - ни от типа процессора, ни от операционной системы, ни от плат ввода-вывода. После принятия стандарта появилась возможность создания аппаратно-независимых библиотек. В настоящее время программы многих фирм производителей ПЛК поддерживают этот стандарт. К достоинствам стандартных языков программирования следует отнести простоту и доходчивость представления, единые требования при подготовке специалистов, возможность создания комплексов проектирования МЭК 61131-3. Такой подход позволяет автоматизировать работу разработчика прикладной системы автоматизации.
Дата добавления: 2015-10-21; просмотров: 179 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Вопрос 5. Функциональная структура многоуровневой системы управления производством. Понятие CIM пирамиды. Функц.сх соврем СУ ТП. | | | Вопрос 10. Технология автоматизации, основанная на применении полевой шины |