|
Читайте также: |
Функциональная схема системы автоматического регулирования частоты вращения приведена на рис. 1.3.
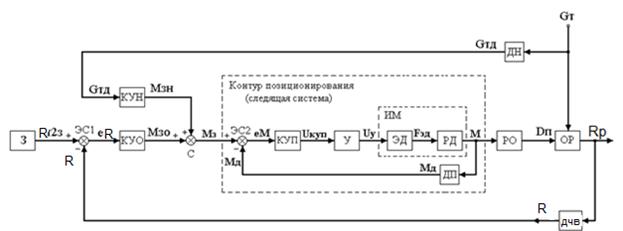
Рис. 1.3 Функциональная схема системы автоматического регулирования частоты вращения насоса
ДЧВ - датчик регулируемой величины, выходной
сигнал которого Rb соответствует действительному значению регу-
лируемой величины Rb2;
ЭС1 - элемент сравнения, формирующий сигнал еR отклонения регулируе-
мой величины от заданного значения (еR= Rт2з-Rд);
КУО - последовательное корректирующее устройство по отклонению, пред-
назначенное для обеспечения требуемого качества работы САР (до-
пустимого изменения регулируемой величины);
ДН - датчик (нагрузки ОР), выходной сигнал которого Gтд
соответствует фактическому расходу Gт;
КУН - корректирующее устройство по нагрузке;
С - сумматор, формирующий сигнал заданного положения ИМ Мз как
сумму выходных сигналов КУН и КУО (Мз=Мзн+Мзо);
ЭС2 - элемент сравнения, формирующий сигнал отклонения положения
ИМ от заданного (eM=Мз-Мд);
КУП - последовательное корректирующее устройство позиционирования,
предназначенное для обеспечения требуемого качества перемеще-
ния ИМ путем формирования ПИД закона регулирования;
У - усилитель, который повышает мощность входного сигнала Uкуп до
уровня Uу, необходимого для перемещения ИМ (и регулирующего
органа регулятора) с требуемой скоростью;
ЭД - электродвигатель, частота вращения которого Fэд определяется вы-
ходным сигналом усилителя Uу;
РД - понижающий редуктор, преобразующий частоту вращения ЭД Fэд в меха-
ническое перемещение М;
ДП - датчик положения исполнительного механизма, выходной сигнал ко-
торого Мд соответствует фактическому положению ИМ М;
РО - паровой регулирующий клапан, связанный механической передачей с РД
и преобразующий перемещение М в непосредственное регулирую-
щее воздействие на ОР ( расход пара Pп).
Дата добавления: 2015-09-04; просмотров: 55 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Объект регулирования | | | НАСТРОЙКА СЛЕДЯЩЕЙ СИСТЕМЫ |