|
Читайте также: |
Эта группа усилителей характеризуется применением в качестве источника энергии жидкости или сжатого воздуха. Гидравлические (пневматические) усилители подразделяются по конструкции дросселя, числу дросселей, их расположению, типу дросселей и числу каскадов.
По конструкции дросселя усилители бывают золотниковые, струйные, сопло-заслонка и игольчатые.
В зависимости от метода управления исполнительными элементами (гидроцилиндрами) гидроусилители можно разделить на три класса: без обратной связи, с обратной связью и с комбинированной схемой управления.
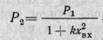
Золотниковый усилитель. Простейший золотниковый усилитель показан на рис. 3.11, а. Он состоит из корпуса 2, поршней 3, штока с пружиной 5, электромагнитов 1, маслопроводов 4 к гидроцилиндру (на рис. 3.11, а не показан), сливных трубок 6 и маслопровода 7 от гидромотора насосной станции (на рис. 3.11, а не показан). Принцип работы такого усилителя состоит в том, что при включении одного из электромагнитов он срабатывает и перемещает шток с поршнями 3 вправо или влево. При этом жидкость.из маслопровода 7 (входного штуцера), полости корпуса и маслопровода 4 (выходных штуцеров) поступает в одну из полостей гидроцилиндра. Таким образом,
в этом случае золотник гидроусилителя выполняет распределительную функцию, т. е. подключает определенные полости гидроцилиндра. Однако, с другой стороны, гидроусилитель является также и усилительным элементом, так как подводимая мощность управления к электромагниту в несколько тысяч раз меньше мощности, развиваемой гидроцилиндром. С этой точки зрения эти усилители являются усилителями мощности, коэффициент усиления которых определяется как k = Рвых/Рвх, где Рвых, Рвх выходная и входная мощности. Основной характеристикой усилителя является зависимость расхода жидкости Q от

Рис. 3.11. Золотниковые усилители
величины плавного перемещения штока золотника χ с поршнями.
Уравнение расхода QД в рабочих окнах идеального золотника можно записать как (при x >0):

где μ1, μ2 — коэффициенты расхода; f 1, f 2—площади проходных сечений отверстий, см2; Р0 — рабочее давление, Па; P1, P2 — рабочие давления в разных полостях цилиндра, Па; Рс — рабочее давление в сливаемой магистрали, Па.
кообразное изменение скорости V гидроцилиндра. При уменьшении тока управления электромагнит отпускает при (IW )отп и пружины штока золотника устанавливают его в нейтральное положение, а поршни золотника перекрывают проходные сечения входного штуцера 7 и сливных 6. Как видим, этот усилитель работает в релейном режиме включено — выключено, т. е. скорость перемещения штока гидроцилиндра происходит скачкообразно. Однако в некоторых случаях требуется плавное изменение этой скорости, например, при управлении стрелами гидроманипулятора. В этом случае применяются гидрозолотники плавного действия, у которых шток с поршнем золотника могут занимать любое устройчивое положение относительно проходного сечения входного штуцера.
На рис. 3.11, г приведена схема такого гидрозолотника, который состоит из корпуса 3, регулировочного винта 1, штока 5 с поршнями 6, пружин штока, удерживающих шток и поршни в нейтральном положении; клапанов 14 с пружинами 9, сливных маслопроводов 10, входного штуцера 13, дросселей 11, 12, клапана 14. Работа такого золотника сводится к следующему. Жидкость от насосной станции под давлением Р0 через дроссель 13 проходит в камеру 12, из которой в камеру 8, приподнимая клапан 14, прижимаемый к своему седлу пружиной 9. Этот клапан насажен на шток якоря электромагнита 2, и его усилие прижатия к седлу определяется не только усилием пружины 9, но и усилием притяжения якоря электромагнита. Если оба электромагнита обесточены, то в левой и правой камерах 8 устанавливается одинаковое рабочее давление P1, величина которого зависит от жесткости пружины 9, которая прижимает клапаны 14 к седлам. Если подключать один из электромагнитов 2 к источнику питания, то усилие прижатия одного из клапанов возрастет за счет магнитного усилия притяжения якоря с насаженным на него клапаном. Соответственно увеличивается и рабочее давление Р1, в результате чего шток золотников с поршнями переместится на величину Δ, зависящую от жесткости пружин 7.
Рассматривая систему в равновесии, можно написать, что

где P1 — рабочее давление; D — диаметр поршня золотника;
d — диаметр седла клапана 14 (см. рис. 3.11, г); с — жесткость
пружины; F — усилие, развиваемое электромагнитом.
Из этих уравнений получаем, что

т. е. смещение золотника Δ пропорционально тяговому усилию электромагнита, которое зависит от величины тока управления Iу.
Теперь определим зазор δ между клапаном 14 и его седлом.
Расход жидкости, подаваемой в камеру 8 через дроссель /, составит

а расход жидкости, протекающей из камеры 8 через клапан 14 в камеру 4, составит

где f1 — площадь сечения зазора между тарелкой клапана и седлом.
f 2 = δπ d,
где δ — зазор между клапаном и седлом; d — диаметр отверстия седла клапана.
Очевидно, что Q1 = Q2 тогда, приравняв правые части равенства, подставив значение f2 и решая равенства относительно δ,
получим, что

Если взять реальные численные значения перемещения давлений Ро, Р 1, f1 d, то получаемые значения δ будут составлять десятые и сотые доли миллиметра, в то время как воздушный зазор между якорем электромагнита и его сердечником x в десятки и сотни раз больше этого значения, т. е. при перемещении якоря на величину δ этот зазор x практически остается постоянным, т. е. перемещением якоря δ можно пренебречь и, следовательно, сила прижатия клапана к седлу может быть принята прямо пропорциональной току управления I у катушки электромагнита, т. е.
Δ = kIy,
где k — коэффициент пропорциональности. Таким образом, в этом случае перемещение штока 5 золотника будет пропорционально току управления и при его различных значениях Iy=Var положение золотника будет различным, что обеспечит различные значения расхода Q в зависимости от значений ампер-витков (IW)y катушки электромагнита 2 золотника. Таким образом обеспечивается плавное изменение скорости штока гидроцилиндра. Характеристика такого гидроусилителя плавного действия показана на рис. 3.11, д.
В некоторых случаях при автоматическом управлении механической системой возникает необходимость синхронизации движений, задаваемых оператором, и рабочих органов машины. В этом случае применяются так называемые следящие системы.
Простейшая гидравлическая следящая система (рис. 3.11 ,е) гидропривода с гидроусилителем золотникового типа имеет рукоятку 1, рычаг 2, золотник 3, гидроцилиндр 5, поршень 6 и
маслопроводы 4 и 7. К золотнику 3 подключены линия высокого давления и слива 0. Золотник соединен двумя трубопроводами 4 и 7 с гидроцилиндром 5. При повороте рукоятки 1 вправо рычаг 2, повернувшись относительно точки б по часовой стрелке, сместит золотник 3 вправо и жидкость начнет поступать по трубопроводу 4 в правую полость гидроцилиндра, а из левой полости вытекать по трубопроводу 7 в сливную линию. Поршень 6 под давлением жидкости пойдет влево и начнет поворачивать рычаг 2 тоже по часовой стрелке относительно точки а. При этом золотник 3 сместится влево и перекроет тру-бомаслопроводы 4 и 7 и поршень 6 остановится. Здесь поршень 6 «следит» за движением золотника 3. Это слежение за движением осуществляется при помощи рычага обратной связи 2. Благодаря этой обратной связи поршень все время стремится уменьшить рассогласование между своим положением и положением золотника 3. В этом и заключается одна из важнейших особенностей следящей системы. В технике имеются и другие гидравлические следящие системы.
При расчете гидравлического золотника задаются расходом жидкости Q, давлением в магистрали Ро, перепадом давления в окне золотника Δ Р, видом жидкости и углом входа жидкости в золотник.
По этим данным определяют диаметр золотника:

где Q — максимальный расход, см3/с; V д — допускаемая скорость жидкости (V д=3...4 м/с). Полученный диаметр округляют до стандартной величины.
Далее определяют сечение окна золотника:

где

Струйный усилитель. Струйный усилитель (рис. 3.12, а) состоит из струйной трубки 2, проходных сечений 3 и 3'. На рис. 3.12, а показан также шток 1 гидроцилиндра 4. Работа такого усилителя сводится к следующему. При среднем положении сопла 2 относительно проходных сечений 3 и 3', жидкость, нагнетаемая в сопло, распределяется равномерно по прежним отверстиям 3 и 3' и давления в полостях цилиндра будут одинаковыми, т. е. Ρ1 = Ρ2. При смещении трубки на а вх, например, вправо проходные сечения изменятся и f2>f1 (за-
штрихованные участки) и давление в правой части гидроцилиндра увеличится по сравнению с левой частью, так как упрощенно можно считать, что
P1=pt1 и P2=p0f2,
где р 0 — рабочее давление, т. е. Р2>Р1 и шток гидроцилиндра начнет смещаться влево. При максимальном смещении струйной трубки, когда струя полностью направлена в одно проход-
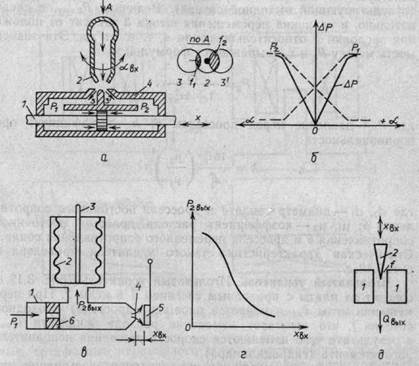
Рис. 3.12. Гидравлические усилители
ное сечение, развиваемое максимальное давление определяется по формуле
Pmax = ξρ v2sin α,
где ξ — коэффициент, учитывающий потери (ξ = 0,9...0,95); ρ — плотность жидкости; υ — выходная скорость струи; α — угол между осью трубки и входной плоскостью приемного сечения (обычно α = 90°).
Статическая характеристика Δ Ρ = Ρ 2— Р1 такого усилителя показана на рис. 3.12,б.
Усилитель сопло-заслонка. Усилитель сопло-заслонка (рис. 3.12, в) состоит из корпуса 1, дросселя с постоянным гидравлическим сопротивлением 6, дросселя с переменным гидравлическим сопротивлением 4 и заслонкой 5.
Работа такого усилителя происходит следующим образом: при подаче жидкости в корпус 1 под давлением P1 и при определенном положении заслонки 5 относительно сопла хвх (дросселя 4) на выходе возникает давление Р2вых, которое воздействует на сильфон 2, при этом перемещается его шток 3 (результирующий выходной сигнал). Величина Р2вых, а следовательно, и величина перемещения штока 3 зависят от положения заслонки 5 относительно сопла 4, т. е. от хвх. Эта зависимость между Р2 и хвх выражается формулой
где P 1 — давление перед дросселем 6; k — коэффициент пропорциональности

где d2, d1 — диаметр сопла 4 и дросселя постоянного сопротивления 6; μ1, μ2 — коэффициент расхода дросселя постоянного сопротивления 6 и дросселя переменного сопротивления сопла 4. Статическая характеристика такого усилителя приведена на рис. 3.12, г.
Игольчатый усилитель. Игольчатый усилитель (рис. 3.12, д) состоит из платы с проходным сечением 1 и иглы 2. При перемещении иглы x вх изменяется площадь (дросселя) проходного сечения f, что вызывает изменение расхода жидкости Qвых, в результате чего изменяются скорости движения исполнительного элемента (гидроцилиндра).
Для увеличения коэффициента усиления, повышения чувствительности, улучшения динамических свойств гидравлические (пневматические) усилители выполняются многокаскадными с различными обратными связями. Усилители — струйная трубка, сопло-заслонка и игольчатый в гидравлических системах являются первым каскадом усиления.
Контрольные вопросы
1. Назначение усилителей и их основные характеристики.; 2. Как производится выбор усилителя?
3. Перечислите достоинства магнитного усилителя.
4. Для чего служат искрогасящие схемы контактов реле?
5. Объясните принцип работы оптрона.
Дата добавления: 2015-08-27; просмотров: 194 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| РЕЛЕ КАК УСИЛИТЕЛЬ | | | ЭЛЕКТРОМАГНИТЫ |