|
Читайте также: |
Датчики скорости вращения имеют самую разнообразную конструкцию и принцип действия. Различают электрические тахогенераторы, механические центробежные приборы, частотные датчики и т. д. Наиболее удобными с точки зрения преоб-
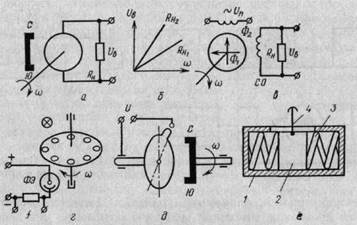
Рис. 2.18. Датчики скорости вращения
разования и управления являются тахогенераторы постоянного и переменного тока.
Тахогенератор постоянного тока. Тахогенератор постоянного тока представляет машину постоянного тока с возбуждением от постоянных магнитов или от специальной обмотки возбуждения (рис. 2.18, а). При вращении ротора тахогенератора в магнитном поле в его обмотке индуцируется ЭДС, пропорциональная угловой скорости ω.
Ε = k Φω,
где k — коэффициент пропорциональности; Φ — магнитный поток обмотки возбуждения; ω — угловая скорость вращения, рад/с; k Ф — чувствительность тахогенератора.
Как видно, чувствительность тахогенератора зависит от величины магнитного потока постоянного магнита. Однако чувствительность тахогенератора зависит также и от внешних факторов, например, от сопротивления нагрузки.
Действительно напряжение на выходе тахогенератора будет
Uв = Ε-I Я R Я
где I Я R Я — падение напряжения в обмотке якоря. Если сопротивление нагрузки RH увеличится, то ток якоря будет I Я = E/RH+ + R Я и выходное напряжение составит UB = E — ER Я /RH + R Я или

Из полученного выражения видно, что сувеличением сопротивления нагрузки RH увеличивается чувствительность тахо-генератора, что и показано на рис. 2.18, б (RН2>RН1). С динамической точки зрения эти датчики безынерционны.
Тахогенератор переменного тока. Наиболее широкое применение получили асинхронные тахогенераторы (рис. 2.18, в). Тахогенератор состоит из двухобмоточного статора и короткозамк-нутого ротора. Ротор часто выполняется в виде стакана из материала, обладающего малым сопротивлением. На одну из обмоток статора подается переменное напряжение из сети UП. При вращении ротора в переменном магнитном потоке Φι этой обмотки в нем наводится ЭДС, ток которой образует новый переменный магнитный поток Ф2, который параллелен сигнальной выходной обмотке СО. Этот поток индуцирует в выходной обмотке ЭДС, которая пропорциональна скорости вращения. При неподвижном роторе в сигнальной обмотке ЭДС будет равна нулю, так как магнитный поток сетевой обмотки Ф1, перпендикулярен ей.
При эксплуатации тахогенераторов переменного тока следует учитывать возможные изменения напряжения в сети и частоты тока. Для нормальной работы эти параметры необходимо стабилизировать. Характеристики этого датчика аналогичны предыдущему.
Частотные фотоэлектрические тахогенераторы. Принцип действия этих тахогенераторов основан на определении частоты пульсирующего тока фотоэлемента VL (рис. 2.18, г)
f=zn /60,
где f — частота пульсирующего тока, Гц; z— число прорезей импульсного диска; n — частота вращения вала, мин-1.
Индукционный датчик частоты вращения. Работа этих датчиков основана на взаимодействии магнитного потока вихревых токов в диске с магнитным потоком возбуждения (рис. 2.18, д) постоянного магнита. Этот датчик, в отличие от предыдущих, релейного действия. Диск при достижении опреде-

Рис. 2.19. Схема пьезоэлектрического датчика ускорения
Рис. 2.20. Датчик контактного сопротивления
ленной частоты вращения магнита поворачивается и замыкает электрическую цепь.
Из механических тахометров наибольшее распространение получили различные центробежные механизмы, принцип работы которых основан на изменении центробежной силы вращения при изменении частоты вращения. Конструктивно они выполняются в виде подвижных грузиков, которые посредством различных механических передач воздействуют на регулируемый объект.
Датчики для измерения ускорения. В ряде систем автоматического регулирования возникает задача измерения ускорения. Одним из способов такого измерения является применение измерительных устройств с инерционной массой (рис. 2.18, е). Датчик состоит из корпуса 1, груза 2 и пружин 3. Груз связан кинематически с ползунком 4 потенциометра (на схеме не показан). При изменении своего положения груз 2 под действием сил инерции переместит ползунок, что вызовет изменение выходного напряжения потенциометра.
Датчиком ускорения может служить и тахогенератор переменного тока, в этом случае его обмотка питания U П подключается к источнику постоянного тока. При равномерном вращении ротора в сигнальной обмотке СО (см. рис. 2.18, в) ЭДС будет равна нулю, так как магнитный поток Φ не пульсирующий. Если скорость вращения будет изменяться под действием ускорения, то магнитный поток начнет пульсировать, в результате чего в сигнальной обмотке СО наведется ЭДС, величина которой будет пропорциональна ускорению.
В тех случаях, когда требуется измерять быстропеременную величину ускорения, применяются пьезоэлектрические датчики
(рис. 2.19). Под действием сил инерции инерционная масса 1, 3 воздействует на кристаллы параллельно соединенных пьезоэле-ментов 4, на гранях которых изменяется количество зарядов электричества. Латунный электрод 2 снимает этот сигнал, по величине которого судят о величине ускорения α (показано стрелкой). Эти датчики имеют малые размеры, очень надежны и имеют широкий диапазон измерения (1... 150 м/с2). Они также применяются для измерения частоты и амплитуды вибраций.
Дата добавления: 2015-08-27; просмотров: 206 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ДАТЧИКИ ДЕФЕКТОСКОПИИ ДРЕВЕСИНЫ | | | ДАТЧИКИ ДЛЯ ИЗМЕРЕНИЯ СИЛЫ, ДАВЛЕНИЯ, ВЕСА |