|
Читайте также: |
Исследование систем трех позиционного
регулирования температуры
1 ЦЕЛЬ РАБОТЫ
Практически изучить систему релейного трех позиционного регулирования. Научиться определять качество системы регулирования по графику переходного процесса.
2 ОСНОВНЫЕ ПОЛОЖЕНИЯ
Позиционное регулирование часто встречается в сельскохозяйственном производстве. Этот вид регулирования достаточно просто реализуется. Различают двух и трех позиционное регулирование. Двухпозиционное регулирование характеризуется двумя положениями - «включено» и «выключено» и наличием исполнительного механизма, который работает как единое целое. Трехпозиционное регулирование характеризуется тремя положениями – «включено», «выключено» и среднее (или «меньше», «норма» и «больше») и наличием исполнительного механизма, состоящего из двух или трех секций (каждая из них работает раздельно).
Если целью регулирования является поддержание определенного температурного режима и объект автоматического регулирования описывается апериодическим звеном первого порядка, то кривые нагрева и охлаждения представляют собой отрезки экспонент.
Выбор позиционного регулятора ориентирован на определенное соотношение времени транспортного запаздывания к постоянной времени объекта:
 (1)
(1)
Если соотношение (1) > 0,2 – то предпочтение следует отдать другим способам регулирования (непрерывному или импульсному).
Качество регулирования САР оценивается по быстродействию и точности регулирования в соответствии с основными показателями: время регулирования, перерегулирование, максимальный динамический выброс, статическая и динамическая ошибка, колебательность.
Позиционное регулирование характеризуется дифференциалом (либо амплитудой автоколебаний) продолжительностью включения (временем включения), временем отключения (пауза), периодом.
Как правило, САР, реализующие позиционное регулирование, строятся в соответствии с принципом автоматического управления (регулирования) по отклонению.
Распространение получили следующие позиционные регуляторы:
- двухпозиционные – ПТР-2, РТ-2, ЭРА. ТЭ3ПЗ, Щ4500, Т419М и др.;
- трехпозиционные – ПТР-3, РТ-3, ТЭ4ПЗ и др..
В комплект регулятора входят электронный блок и датчик. Перечисленные регуляторы, кроме Щ4500, аппаратного типа. Щ4500 – приборного типа. Регуляторы ПТР комплектуются термисторным датчиком типа ММТ. Каждый датчик регулятора типа ПТР подобран к регулирующему блоку индивидуально и он имеет одинаковый номер с электронным блоком (на корпусе датчика и блока). Регуляторы типа РТ. ТЭ3ПЗ, Т419 комплектуются проволочными термометрами сопротивления марки ТСМ и ТСП. Подбор проволочного датчика осуществляется в соответствии с его группой. Группа датчика представляет собой шифр его статической характеристики. Выделяют группы: Гр 20, Гр 21, Гр 22, Гр 23, 50М. 100М. 50П. 100П и др. Миллирегулирующий вольтметр Щ4500 имеет релейный выход и комплектуется генераторным датчиком - термопарой.
Кроме указанных выше регуляторов широкое распространение в сельком хозяйстве и перерабатывающей промышленности получили дилатометрические регуляторы – типа ТУДЭ и биметаллические – типа ДТКБ.
3 ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ
Функциональная схема САР представлена на рисунке 1. Объектом управления, в котором осуществляется стабилизация температурного режима, является внутренний объем (часть материального мира) воздуха лабораторного стенда. Канал регулирования в данном случае «мощность теплового потока – температура воздуха». Исполнительным механизмом (устройством) является нагреватель, в качестве которого для наглядности используются лампы накаливания, расположенный внутри корпуса лабораторного стенда. На стенде смонтированы несколько регуляторов – Т419, ТЭ3ПЗ, ТЭ4ПЗ, Щ4500 и др. с соответствующими датчиками. В верхней части стенда смонтирован контрольный термометр. На передней части стенда расположены промежуточные реле, магнитные пускатели и автоматический выключатель для подачи напряжения на лабораторный стенд. На панели имеются клеммы для подвода питания к электронному блоку регулятора и выходные клеммы выходного реле регулятора.
На правом боку имеется смотровое окно, позволяющее наблюдать за состоянием исполнительного механизма и расположением датчиков в пространстве.
4 ПОРЯДОК ВЫПОЛНЕНИЯ ЛАБОРАТОРНОЙ РАБОТЫ
1. Ознакомиться с лабораторной установкой и приборами, расположенными на стенде. Записать марки основных приборов.
2. Изучить устройство и принцип работы регуляторов.
3. Собрать схему рисунок 3. Эксперимент проводится с одним из регуляторов на стенде, выбранным преподавателем.
4. После проверки схемы преподавателем установить заданную температуру и дифференциал и записать их. Записать показания контрольного термометра (начальная температура).
5. Приготовить таймер к работе.
6. Включить установку под напряжение и снять кривую нагрева, записывая в таблицу показания контрольного термометра через каждые 2 минуты до срабатывания регулятора, а затем, по мере срабатывания - температуру и время. Эксперимент продолжается до тех пор пока температура не установится (не менее 15-ти срабатываний).
7. Построить кривую нагрева и предоставить её преподавателю для проверки.
Оценить качество регулирования САР. Если переходный режим явно выражен, то оценить: время регулирования, перерегулирование, максимальный динамический выброс, колебательность, статическую ошибку.
 , (1)
, (1)
где уmax – максимальное значение регулируемой величины.
Время регулирования tрег характеризует быстродействие САР. Это время от начала приложения внешнего воздействия к САР до вхождения регулируемой величины в заданную зону допустимых отклонений 2Δ. Значение Δ обычно принимают равным Δ = (0,03…0,05)ууст. Для апериодических переходных процессов на рис. 3 время регулирования обозначено через tрегА. Время регулирования зависит от свойств ОУ, выбранного закона регулирования и параметров настройки регулятора.
Коэффициент затухания определяется выражением
Ψ = 1 – у3/у1.
Из выражения для Ψ следует, что чем меньше последующее отклонение у3 выходной величины в положительную сторону по сравнению с предыдущим его отклонением у1 в ту же сторону, тем больше затухание колебательного процесса. При незатухающем колебательном процессе у1 = у3 и коэффициент затухания Ψ=0.
Колебательность системы характеризуется числом колебаний n графика переходного процесса относительно установившегося значения ууст за время регулирования tрег. Каждый переход графика кроме первого через линию, проведенную на уровне значения ууст, считается за половину периода колебаний. Так, для графика, приведенного на рис. 3, колебательность составляет n= 0,5∙3=1,5 периода.

Для квазиустановившегося режима оценить амплитуду колебаний, статическую ошибку, продолжительность включения (время включения tв, время отключения tj, время цикла tц):
ПВ=  (2)
(2)
8.Сделать выводы по работе и составить отчет.
5 СОДЕРЖАНИЕ ОТЧЕТА
Отчет должен содержать:
- цель работы;
- марки основных приборов;
- схему электрическую принципиальную лабораторного стенда;
- схему САР функциональную;
- таблицу с экспериментальными данными;
- график кривой нагрева;
- показатели, характеризующие качество регулирования;
- выводы по работе.
6. КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
11. Какой принцип регулирования реализован в лабораторной установке? Поясните его работу.
12. Сравните два основных принципа автоматического регулирования на примере лабораторного стенда.
13. В чем суть 2-х и 3-х позиционного регулирования?
14. Как изменится частота включения исполнительного механизма, если увеличить дифференциал регулятора? Как при этом изменится качество регулирования?
15. Чем количественно характеризуется тепловая инерционность датчика температуры, от чего она зависит и как влияет на качество регулирования?
16. Какие виды регуляторов применяются в перерабатывающей промышленности сельскохозяйственной продукции? Дайте краткую характеристику области применения.
17. По каким показателям выбирают регулятор и какие виды настроек он имеет?
18. Как зависит характер установившегося процесса САР при изменении зоны неоднозначности? Приведите примеры этих характеристик.
19. Какие позиционные регуляторы выпускаются промышленностью? Приведите примеры и дайте их краткую характеристику.
20. Можно ли заменить датчик регулятора ПТР-3 (и подобных регуляторов) на другой подобный?
ЛИТЕРАТУРА
1.Наладка средств автоматизации и автоматических систем регулирования. Справочное пособие. / А.С. Клюев и др. – М.: Энергоатомиздат, 1989 с. 341-355.
2.Наладка автоматических систем и устройств управления технологическими процессами. Справочное пособие. / А.С. Клюев и др. – М.: Энергия, 1977 с. 352-372.
3.Автоматика на с.х. предприятиях. Справочник. / В.И. Бодров и др. – М.: Россельхозиздат, 1978 с.250-253.
4.Колесов Л.В. Основы автоматики. – М.: «Колос», 1984, с.218-227.
Рисунок 1. Схема функциональная САР.
Рисунок 2. Схема электрическая принципиальная трех позиционного регулирования температу
ЛАБОРАТОРНАЯ РАБОТА № 11
ОПРЕДЕЛЕНИЕ СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ОБЪЕКТОВ РЕГУЛИРОВАНИЯ
1. ЦЕЛЬ РАБОТЫ
1.1. Освоение методики экспериментального получения переходных характеристик (кривых разгона) регулируемого объекта.
1.2. Научиться обрабатывать кривые разгона для получения дифференциальных уравнений, переходных и передаточных функций, а также частотных характеристик объектов регулирования.
2. ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
При выборе регулятора необходимо учитывать свойства объекта регулирования. Количественные и качественные показатели этих свойств (самовыравнивание, а также транспортное и переходное запаздывание) характеризуются временными диаграммами (переходными и импульсными характеристиками, переходными функциями), дифференциальными уравнениями, передаточными функциями, частотными характеристиками. Перечисленные виды описаний объектов регулирования взаимозаменяемые, то есть получив один из них возможно получить и другие. В то же время различные формулировки задач теории автоматического регулирования требуют тех или иных видов описаний. Указанные виды возможно получать аналитически, либо экспериментально.
Экспериментальному способу получения переходных характеристик отдается предпочтение по причине его относительной простоты, доступности, обращения к инженерной сути решения задачи. Существо его заключается в том, что на вход объекта регулирования подается типовое ступенчатое воздействие («скачок») и наблюдается реакция объекта на это воздействие. Сравнение полученной реакции с реакцией типового объекта (элементарного звена) позволяет принять решение о математическом описании объекта. Поскольку известны все основные виды описаний типового звена, то считают известными виды описаний исследуемого звена. В некоторых случаях реакцию исследуемого объекта представляют в виде комбинации реакций элементарных звеньев; в других случаях с целью получения более простого описания аппроксимируют (заменяют) график реакции исследуемого объекта более удобным графиком, делая при этом определенные физические допущения (огрубления).
Наиболее часто встречаются случаи, когда объекты регулирования описываются либо интегрирующим звеном, либо апериодическими звеньями первого или второго порядка, а также комбинациями этих звеньев со звеном чистого (транспортного) запаздывания. Передаточная функция объекта управления, описываемого интегрирующим звеном со звеном транспортного запаздывания, имеет вид
W(p) =  (астатический объект),
(астатический объект),
а передаточная функция объекта управления, описываемого апериодическим звеном первого порядка со звеном транспортного запаздывания, имеет вид
W(p) =  (статический объект),
(статический объект),
где р – оператор Лапласа,
Т – постоянная времени,
tзап – время чистого (транспортного) запаздывания,
к – коэффициент передачи.
В инженерной практике необходимо ориентироваться на такое описание объекта управления, которое не противоречит физическому смыслу.
Кривая разгона 1 и схема ее обработки показана на рис.3. Величина типового воздействия z(t) определяется из конкретных условий и не превышает, как правило, номинального значения (в нашем случае Uc=220 В или Iраб Рнаг = 75 Вт), а чаще всего значительно меньше этого значения. Если реакция объекта управления на типовое воздействие имеет вид 2, она соответствует графику экспоненты.
Наиболее распространенными методами нахождения постоянной времени являются метод касательных и экспресс-метод.
Экспресс-метод базируется на следующем свойстве графика экспоненты: время переходного процесса составляет tп.п. = (4…5)Т. Разделив участок экспоненты, соответствующий переходному процессу по оси абсцисс на 4…5 отрезков, находят Т. Время чистого (транспортного) запаздывания находится непосредственно из графика (рис.3).
Построение АФЧХ апериодического звена с чистым запаздыванием удобно осуществлять в два этапа:
1.Строят АФЧХ звена без запаздывания.
2. Осуществляют сдвиг годографа на фазу, соответствующую времени запаздывания.
Построение показано на графике рис.4. График АФЧХ объекта без запаздывания представляет собой полуокружность, расположенную в 4-ом квадранте комплексной плоскости. Радиус полуокружности равен к/2. Для осуществления поворота графика задаются значениями угла φ(ω) = arctgωT, позволяющими построить 4…5 векторов АФЧХ, используя транспортир. Значения ω следует выбирать для диапазона углов 45º…80º. Затем строят годограф объекта с учетом запаздывания. Для этого поворачивают каждый вектор на угол β = ωtзап по часовой стрелке. Таким образом, общая фаза объекта будет соответствовать φ(ω) + β(ω) = |- arctgωT - ωtзап|. Значение ωtзап следует переводить в градусную меру.
3.ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ
В качестве исследуемого объекта регулирования принят макет животноводческого помещения. Датчиком температуры является термометр сопротивления RК1 типа ТСП 50, который подключен к логометру А1 типа Ш-6900.
Электрический режим нагревателя таков: U = 220 В, Р = 75 Вт.
4. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Ознакомиться с лабораторной установкой (нагреватель, датчик температуры типа ТСП, логометр Ш-6900). Записать их основные данные в таблицу 1.
2.
Таблица 1. - Технические характеристики измерительных оборудования
| Номер п/п | Наименование прибора | Марка | Система прибора | Класс точности | Предел измерения | Цена деления |
3. Подготовить таблицу 2 для записи экспериментальных данных.
Таблица 2. - Протокол испытания коаксиального нагревателя
| Время Т, мин. | …. | |||||||||||
| Температура t, ºС | …. |
4. Включить автоматический выключатель QF1 и снять кривую разгона. Данные записать в составленную таблицу 2. Первые несколько минут снимать показания температуры через одну минуту, а далее – через 2 минуты. Время всего опыта ориентировочно занимает около 30 - 40 минут. В конце опыта убедиться, что режим работы нагревателя установившийся (температура постоянна).
5. Построить график кривой разгона Т°=f(t)  в приемлемом масштабе (тетрадный лист) и представить его на проверку.
в приемлемом масштабе (тетрадный лист) и представить его на проверку.
6. Обработать кривую разгона и получить следующие виды описаний объекта регулирования: передаточную функцию W(p), дифференциальное уравнение, АФЧХ W(jω), АЧХ W(ω), ФЧХ (ω). В качестве входной величины принять значение напряжения или ток или мощность нагревателя 75 Вт на входе установки, а в качестве выходной величины – температуру воздуха внутри стенда.
7. Сделать выводы по полученным характеристикам.
6. СОДЕРЖАНИЕ ОТЧЕТА
Основные технические данные используемого оборудования (таблица 1), принципиальную электрическую схему установки, таблицу 2 с экспериментальными данными, график кривой разгона Т°=f(t), аппроксимирующий график и сведения по его обработке (tзап и Т), цифровые и размерные показатели для k, Т, tзап, описание объекта регулирования с использованием передаточной функции, дифференциального уравнения, переходной функции и графиков частотных характеристик, выводы по результатам выполненной работы.
7.КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Что понимают под передаточной функцией? При помощи каких элементарных звеньев можно описать встречающиеся в инженерной практике объекты регулирования?
2. При помощи каких средств возможно количественно описать динамические свойства объектов регулирования?
3. Что понимают под кривой разгона? Какова методика ее определения в лабораторной работе? Что понимают под переходной характеристикой?
4. Что понимают под частотными характеристиками? Поясните, как определялись частотные характеристики объекта регулирования в лабораторной работе.
5. Что понимают под постоянной времени объекта регулирования? Какова методика ее определения?
6. Методы определения постоянной времени.
7. Характеристики объектов регулирования: аккумулирующая способность, самовыравнивание, запаздывание процесса регулирования, время разгона, статическая ошибка.
8. Критерии устойчивости САР: корневые, алгебраические, частотные; запас устойчивости по модулю и по фазе.
8. ЛИТЕРАТУРА
3. Бородин И.Ф., Рысс А.А. Автоматизация технологических процессов. – М.: Колос, 1996.-351 с.
4. Шавров А.В., Коломиец А.П. Автоматика. М.: Колос,1999.-264 с.
5. Средства автоматики и телемеханики / Н.И.Бохан, И.Ф.Бородин, Ю.В.Дробышев и др. М.: Агропромиздат, 1992. – 351 с.
6. Клюев А.С. Автоматическое регулирование. - М.: Высш.шк., 1986.-351 с.
7. Коломиец А.П., Кондратьева Н.П., Владыкин И.Р., Юран С.И. Электропривод и электрооборудование. Учебник для ВУЗов. М.: КолосС, 2006.-328 с.

 |
ЕК – нагреватель Рн=75 Вт
А1 – регулирующий милливольтметр Ш 6900
RK – термометр сопротивления
ОУ – объект управления
Рисунок 1. Схема лабораторной установки
Рис.3 Обработка кривой разгона
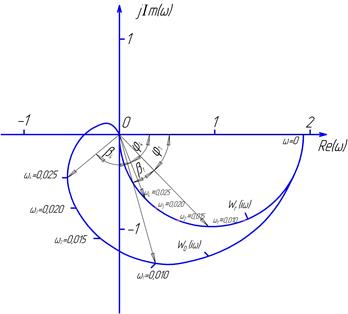
Рис.4 Построение АФЧХ
Лабораторная работа N 12
СИНТЕЗ ОДНОТАКТНЫХ СИСТЕМ УПРАВЛЕНИЯ
ЦЕЛЬ: Освоение приемов построения однотактных систем управления на основе логических элементов автоматики.
ЗАДАНИЕ: «Разработать схему управления в соответствии с задачей № …» Спроектировать, собрать и проверить работу системы управления, выполненную только на элементах И-НЕ, которая должна технически реализовать задание задачи.:Задание на лабораторную работу (№ задачи из списка) студенты получают заранее обычно на предшествующем выполнению лабораторной работы занятии).
ЗАДАЧИ:
I. В цехе установлено семь аппаратов, каждый потребляет мощность 1 кВт. Цех получает электроэнергию от подстанции, где установлено два трансформатора мощностью 2 и 4 кВт. К подстанции подведена силовая линия, способная пропускать максимальную мощность 5кВт. Необходимо включать первый трансформатор, или второй, или оба, в зависимости от мощности потребляемой цехом, что позволяет экономить электроэнергию за счет уменьшения потерь х.х. в трансформаторах. На дискретную схему управления подается двоичный трехразрядный код, характеризующий число одновременно включенных аппаратов.
2. В цехе установлено семь аппаратов, каждый потребляет мощность 1 кВт. Цех получает электроэнергию от подстанции, где установлено два трансформатора мощностью 3 и 3 кВт. К подстанции подведена силовая линия, способная пропускать максимальную мощность 6кВт. Необходимо включать первый трансформатор, или второй, или оба, в зависимости от мощности потребляемой цехом, что позволяет экономить электроэнергию за счет уменьшения потерь х.х. в трансформаторах. На дискретную схему управления подается двоичный трехразрядный код, характеризующий число одновременно включенных аппаратов.
3. В цехе установлено семь аппаратов, каждый потребляет мощность 1 кВт. Цех получает электроэнергию от подстанции, где установлено два трансформатора мощностью 2 и 4 кВт. К подстанции подведена силовая линия, способная пропускать максимальную мощность 6кВт. Необходимо включать первый трансформатор, или второй, или оба, в зависимости от мощности потребляемой цехом, что позволяет экономить электроэнергию за счет уменьшения потерь х.х. в трансформаторах. На дискретную схему управления подается двоичный трехразрядный код, характеризующий число одновременно включенных аппаратов.
4. На дискретную схему управления подается двоичный трехразрядный код, характеризующий число одновременно включенных аппаратов. Сигналы со схемы управления должны включать два контактора. При наличии на входе схемы двоичных наборов, соответствующих десятичным цифрам 1;3; 5 включается первый контактор; а при наличии – 2; 4; 6 включается второй контактор.
5. Задача аналогична задаче 3, за исключением того, что при наличии' на входе схемы двоичных наборов, соответствующих десятичным цифрам 1;2; 3 включается первый контактор, а при наличии 4; 5; 6 включается второй контактор.
6. Цифровой вольтметр вырабатывает двоичный трехразрядный код и может измерить напряжение в диапазоне от 0 до 7. Необходимо создать систему сигнализации, включающую аварийную лампу при выходе напряжения за пределы диапазона 4-6 В.
7. Задача аналогична задаче 6, за исключением того, что аварийная лампа включается при выходе напряжения за пределы 4-5 В.
8. Задача аналогична задаче 6, за исключением того, что аварийные 'лампы включаются в диапазоне 1-4 В и при значении диапазона 6-7 В.
9. Цифровой вольтметр вырабатывает двоичный четырехразрядный код и может измерить напряжение в диапазоне от 0 до 15. Необходимо создать систему сигнализации, включающую аварийную лампу при понижении напряжения до 12В.
10.Цифровой вольтметр вырабатывает двоичный четырехразрядный код и может измерить напряжение в диапазоне от 0 до 15. Необходимо создать систему сигнализации, включающую аварийную лампу при повышении напряжения выше 15В.
11.Цифровой вольтметр вырабатывает двоичный четырехразрядный код и может измерить напряжение в диапазоне от 0 до 15. Необходимо создать систему сигнализации, включающую аварийную лампу при понижении напряжения до 10В.
12. Необходимо создать устройство для отбраковки изделий, которые имеют два и более дефекта.
1.ПОЯСНЕНИЯ К ВЫПОЛНЕНИЮ РАБОТЫ
Однотактной системой управления называют систему, в которой выходной сигнал (сигналы) управления однозначно, т.е. полностью и в тот же момент времени, определяется входными сигналами. Такая система управления может быть реализована устройством, которое называют комбинационным или автоматом без элемента памяти. Операторы функций алгебры логики с двумя аргументами являются простейшими примерами реализации таких устройств, другими примерами однотактных устройств могут служить: дешифраторы, шифраторы, преобразователи кодов, распределители, мультиплексоры. Широко распространенные микросхемы, в качестве базовых, имеют логические элементы И-НЕ, такое положение объясняется особенностями технологии изготовления микросхем и тем фактом, что элемент И-НЕ образует основной базис, или основную функционально полную систему элементов. Последнее означает, что с помощью этих элементов можно создать любую, сколь угодно сложную логическую операцию, а следовательно и систему управления. Рассмотрим пример синтеза однотипной системы с логическими элементами И-НЕ. Требуется создать схему управления браковочным устройством, которое содержит три дефектоскопа, одновременно контролирующих три зоны листа материала. При наличии в зоне одного дефекта дефектоскоп вырабатывает единичный сигнал. Если в листе больше чем один, дефект, устройство должно подать единичный сигнал на толкатель, который сбрасывает негодный лист в бункер. Более строго задачу можно сформулировать так: спроектировать устройство на элементах И-НЕ с тремя входами, на выходе которого появится сигнал в случае, если на большинство входов будут поданы сигналы. Синтез однотактной системы, т.е. создание однотактной системы (структуры) на основе описания ее функционирования, проводится в несколько этапов: I. построение таблицы состояний - формализация условий работы системы; 2. запись логической функции в виде формулы; 3. упрощение логической функции (если это потребуется) и приведение ее к виду, содержащему заданные логические операции; 4. реализация логического выражения заданным базисом элементов.
Рассмотрим эти этапы:
1.1. Построение таблицы состояний.
Таблица состояний (истинности) представляет собой формализованную запись условий работы системы. Таблица составляется так: сначала в нее вносят все возможные комбинации (наборы) входных сигналов, количество наборов, определяется по выражению 2n, где n - число входных сигналов), а затем в соответствии с требованиями (содержательными) и конкретной системе управления для каждой комбинации записывают значение выходного сигнала. Если какая-то конкретная комбинация входных сигналов не встречается в системе управления, то для этой комбинации можно не проставлять значения выходного сигнала. Для того, чтобы не пропустить ни одной комбинации входных сигналов, наборы сигналов (двоичных аргументов) следует записывать по определенному правилу. Наиболее подходящим правилом, в этом случае, является правило расположения двоичных п-разрядных наборов (строк таблицы соответствия) по сумме "весов" тех сигналов, которые имеют единичные значение. "Вес" единиц каждого разряда установлен по следующему правилу: младший разряд, соответствующий крайней правой колонке входного сигнала имеет вес 20, следующий за ним – 21, далее -22, и т.д.
В качестве примера укажем, что двоичный трехразрядный набор 1012 =22×1+21×0+20×1=510
будет записан в строке под номером 5.
Таблица 1 представляет таблицу состояний (истинности) для браковочного устройства. Выходной сигнал У в ней принимает значение I только в тех случаях, когда в строчке, обозначающей комбинацию входных сигналов, есть по крайней мере две единицы, т.е. заполнение последней колонки таблицы соответствия осуществляется в соответствии со смысловым содержанием задачи.
Таблица 1 Таблица состояний для браковочного устройства
| Номер cостояния | Входные сигналы | Выходной сигнал Y | ||
| X3 "вес"22 | X2 "вес" 21 | Х1 "вес" 20 | ||
1.2. Запись логической функции
 Логическую функцию, описывающую условия, при которых выходной сигнал равен единице удобнее всего записать в виде совершенной дизъюнктивной нормальной форма (СДНФ). СДНФ логической функции формируется так: I) для каждой единицы выходного сигнала составляется конъюнкция (логическое произведение) входных сигналов, причем, если входной сигнал равен нулю, то он входит в произведение со знаком инверсии (например, для строки - номера состояния 5, выходной сигнал равен 1, а его описание в единице удобнее всего записать в виде совершенной дизъюнктивной нормальной форма (СДНФ). СДНФ логической функции формируется так: I) для каждой единицы выходного сигнала составляется конъюнкция (логическое произведение) входных сигналов, причем, если входной сигнал равен нулю, то он входит в произведение со знаком инверсии (например, для строки - номера состояния 5, выходной сигнал равен I, а его описание в виде комгаонкции будет x3· x2 ·x1); 2) все наборы конъюнкций объединяются знаками дизъюнкций (логическая сумма); 3) полученное выражение приравнивается обозначению логической функции, в данном случае -y.
Логическую функцию, описывающую условия, при которых выходной сигнал равен единице удобнее всего записать в виде совершенной дизъюнктивной нормальной форма (СДНФ). СДНФ логической функции формируется так: I) для каждой единицы выходного сигнала составляется конъюнкция (логическое произведение) входных сигналов, причем, если входной сигнал равен нулю, то он входит в произведение со знаком инверсии (например, для строки - номера состояния 5, выходной сигнал равен 1, а его описание в единице удобнее всего записать в виде совершенной дизъюнктивной нормальной форма (СДНФ). СДНФ логической функции формируется так: I) для каждой единицы выходного сигнала составляется конъюнкция (логическое произведение) входных сигналов, причем, если входной сигнал равен нулю, то он входит в произведение со знаком инверсии (например, для строки - номера состояния 5, выходной сигнал равен I, а его описание в виде комгаонкции будет x3· x2 ·x1); 2) все наборы конъюнкций объединяются знаками дизъюнкций (логическая сумма); 3) полученное выражение приравнивается обозначению логической функции, в данном случае -y.
Для таблицы состояний 1 логическая функция в форме СДНФ имеет вид

Логическая функция определяет условия, при которых у = 1. Эти условия могут возникнуть в четырех случаях, каждый из которых характеризуется определенной комбинацией значений трех входных сигналов.
1.3. Упрощение (минимизация) логической функции и приведение ее к виду, содержащему заданные логические функции
Для преобразования и минимизации логической функции используют законы алгебры логики. Приведем записи логических законов.
1. x1 x2=x2x1 переместительный или
x1+x2=x2+x1 коммутационный закон
2. (x1 x2) x3=x1 (x2 x 3) сочетательный или ассоциативный
(x1+x2)+x3=x1+(x2+x3) закон
3. (Х1 + X2)X3 = Х1 X3+X2 X3 распределительный или
x1x2 +x3=(x1+x3)(x2+x3) дистрибутивный закон
последняя строка является специфичной и имеет место только в алгебре логики, формы других выше приведенных строчек применимы как и обычной алгебре, так и к алгебре логики.
4. х1 + х1 = 1 закон исключенного третьего
5. x1 x1=0 закон противоречия
6. x x x x …x=x закон идемпотентности
x+x+x+…+x=x

 7. x1·x2=x1+x2 закон инверсии или
7. x1·x2=x1+x2 закон инверсии или



 x1+x2= x1· x2законы де Моргана
x1+x2= x1· x2законы де Моргана
8. x1+x1· x2=x1+x2 закон поглощения
 x1+x1· x2=x1+x2
x1+x1· x2=x1+x2
 9. x1·x2 + x1·x2 =x1 закон склеивания
9. x1·x2 + x1·x2 =x1 закон склеивания
10. x = x закон двойного отрицания
11 х + 1 = 1х · 1 = х
 х + 1 = 1 х · 1 = х
х + 1 = 1 х · 1 = х
х + 0 = х х · 0 = 0 тожества алгебры логики
 х + 0 = х х · 0 = 0
х + 0 = х х · 0 = 0
В преобразованном и минимизированном виде логическая функция должна содержать только те логические операции, которые можно реализовать в заданном базисе логических элементов. В рассматриваемом случае логическую функцию необходимо реализовать на элементах И-НЕ. Минимизация и преобразование логической функции дают следующее логическое выражение

 у = х3 ·х2· х1 + х3 · х2· х1 + х3 ·х2 · х1 + х3 ·х2 ·х1 = х3 ·х2 ·х1 + х3 ·х2 ·х1 + х3 ·х2 · (х1 + х1 ) =
у = х3 ·х2· х1 + х3 · х2· х1 + х3 ·х2 · х1 + х3 ·х2 ·х1 = х3 ·х2 ·х1 + х3 ·х2 ·х1 + х3 ·х2 · (х1 + х1 ) =
 = х3 ·х2 ·х1 + х3 ·х2 ·х1 + х3 ·х2 = х3 ·х2 ·х1 + х3 · (х2 ·х1 + х2 ) = х3 ·х2 ·х1 + х3 ·х1 + х3 ·х2 =
= х3 ·х2 ·х1 + х3 ·х2 ·х1 + х3 ·х2 = х3 ·х2 ·х1 + х3 · (х2 ·х1 + х2 ) = х3 ·х2 ·х1 + х3 ·х1 + х3 ·х2 =
 |  |



 = х1 ·(х3 ·х2 + х3 ) + х3 ·х2 = х1 ·х2 + х1 ·х3 + х3 ·х2 = х1 ·х2 · х1 ·х3 · х3 ·х2
= х1 ·(х3 ·х2 + х3 ) + х3 ·х2 = х1 ·х2 + х1 ·х3 + х3 ·х2 = х1 ·х2 · х1 ·х3 · х3 ·х2

 Для минимизации и преобразования использовались: закон исключенного третьего, распределительный закон поглощения, закон двойного отрицания и закон де Моргана.
Для минимизации и преобразования использовались: закон исключенного третьего, распределительный закон поглощения, закон двойного отрицания и закон де Моргана.
1.4. Реализация логического выражения заданным базисом элементов
На рис. I приводится схема реализации полученного логического выражения на элементах И-НЕ.
|





 Х1Х3
Х1Х3
|
 Х1
Х1
|





 У
У

|

 Х2Х3
Х2Х3
 Х3
Х3
Рис. 1
2. ОПИСАНИЕ ЛАБОРАТОРНОГО СТЕНДА
Лабораторная установка состоит из одного стенда. На лицевой панели стенда имеются изображения наборов различных логических элементов, реализованных на микросхемах серии К-155, а также.светодиоды, тумблеры и т. д. Питание на стенд подается при помощи тумблера I (при этом загорается сигнальная лампа), тумблер 2 - включает питание генератора тактовых импульсов и одно вибратора. При выполнении данной лабораторной работы тумблер 2 не включается. Для выполнения данной лабораторной работы используются только элементы И-НЕ с различным числом входов и одним выходом. Разводка питания микросхем, реализующих логические функции- осуществлена внутри стенда. Информационные сигналы формируются от источника логического нуля, обозначенного знаком "-" при помощи тумблеров, имеющих три гнезда подключения (тумблеры формирования генератора логических 0 и I). При формировании генератора логических 0 и I следует учесть, что подача сигнала на вход любого элемента с "пустого" места, соответствует подаче на него логической единицы.
3. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
Задание на лабораторную работу (N задачи из списка, задания) студенты получают заранее, обычно на предшествующем выполнению лабораторной работы занятии. Синтез системы управления выполняют по рассмотренным выше этапам. Полученную схему реализуют на стенде'. Входные сигналы формируют от "источника" "-" при помощи тумблеров, а выходные подаются на светодиоды. Проверку работоспособности синтезированной системы управления осуществляют, изменяя значения входных сигналов в порядке, определяемом таблицей состояний. Перед непосредственным включением стенда, необходимо пригласить преподавателя для проверки схемы.
4. СОДЕРЖАНИЕ ОТЧЕТА
1. Номер и название лабораторной работы.
2. Цель работы.
3. Словесную запись задачи синтеза.
4. Таблицу состояния (истинности).
5. Упрощенные и приведенные к заданному базису элементов логические функции, вместе с путем, которым они получены.
6. Синтезированную схему устройства управления на элементах И-НЕ, а так же ее релейно-контактный эквивалент
7. Выводы по работе.
КОНТРОЛЬНЬЕ ВОПРОСЫ И ЗАДАНИЯ
1. Что понимают под функцией алгебры логики? Привести примеры всех функций двух аргументов.
2. Что понимают под функционально полным базисом алгебры логики? Из каких логических функций он может быть образован?
3. Что понимают под таблицей соответствия? Как она формулируется?
4. Какими способами можно минимизировать логические выражения? Приведите примеры.
5. Что понимают под однотактной системой управления и чем она отличается от многотактной системы управления?
6. Что понимают под СДНФ и как она записывается по таблице соответствия (истинности)?
7. Запишите релейно-контактные эквиваленты основных логических функций 2-х аргументов.
8. Докажите справедливость распре делительного (дистрибутивного) закона.
9. Докажите справедливость закона поглощения.
10. Докажите справедливость закона склеивания.
11. Что понимают под принципом двойственности в алгебре логики?
12. Докажите справедливость закона исключенного третьего. - Основных тождеств алгебры логики.
13. Как получить минимизированную формулу алгебры логики при помощи карты Карно.?
14. Запишите карту Карно для функции ИЛИ.
15. Какова методика синтеза однотактных логических систем управления?.
16. Что понимают под шифратором? Запишите для него таблицу истинности.
17. Что понимают под дешифратором? Запишите для него таблицу истинности.
18. Что понимают под мультиплексором? Запишите для него таблицу истинности или аналитическую формулу?
19. Какую схему реализует триггер: однотактную или многотактную? Ответ обоснуйте.
20. Какова связь между исчислениями по основанию 10 и по основанию 2?
Лабораторная работа № 13
СИНТЕЗ МНОГОТАКГНЫХ СИСТЕМ УПРАВЛЕНИЯ
Цель: Освоение приемов построения простейших многотактных систем управления на основе логических элементов и триггеров.
Задание: Спроектировать, собрать и проверить работу системы управления, которая должна технически реализовать одну из следующих задач:
1. Жидкости из двух емкостей сливаются в смеситель причем
одновременная подача жидкостей из обеих емкостей запрещена. По
дача жидкости производится открытием электромагнитного клапана,
установленного в каждой емкости. Необходимо управлять работой
клапанов путем кратковременного нажатия на одну из следующих
кнопок: «СЛИВ ИЗ ЕМКОСТИ 1», «СЛИВ ИЗ ЕМКОСТИ 2», "СЛИВ ЗАКОН
ЧИТЬ".
2. Кратковременное появление на входе схемы управления кода 010 разрешает долговременный доступ к памяти вычислительно машины: т.е. на выходе схемы управления вырабатывается единичный сигнал. Кратковременные появления на входе схемы кода 100 вызывает прекращение связи оператора с памятью машины.
3. Технологическая линия содержит два аппарата работающие в цикле по очереди. В схеме управления должны быть предусмотрены два входа: для сигнала запуска технологического цикла с первого аппарата и остановки цикла. В каждом аппарате установлен датчик, вырабатывающий единичный импульсный сигнал при окончании технологического процесса. По сигналу от датчика должен включаться неработающий аппарат и выключается работающий.
4. Синтезировать систему управления процессом прессования полимерных изделий. В процессе прессования диэлектрическая проницаемость изделия сначала увеличивается вследствие увеличения температуры изделия, а затем начинает уменьшаться, ввиду отверждения полимера. Изделие готово и его можно извлекать из пресс-формы, когда уменьшающаяся диэлектрическая проницаемость достигает некоторого значения. При достижении этого значения измерительный прибор вырабатывает единичный сигнал. Необходимо подать сигнал на размыкание прессформы при получении второго сигнала от измерительного прибора (первый сигнал вырабатывавтся при увеличении диэлектрической проницаемости).
5. Необходимо, чтобы при нажатии кнопки "ПУСК" включалась сирена, а после отпускания этой кнопки включался исполнительный механизм. Нажатие на кнопку "СТОП" должно выключать исполнительный механизм.
6. Необходимо включать и выключать исполнительный механизм подачей импульса по одной и той же линии связи. Первый импульс должен включать исполнительный механизм, второй выключать его, третий вновь включать и т.д;
7. Прибор, установленный перед упаковочным ящиком, вырабатывает единичный импульс при опускании в ящик детали. Необходимо после окончания второго импульса включить толкатель, который устанавливает в ящик мягкую прокладку. Толкатель должен выключаться при появлении очередного импульса от прибора.
8.Расположенные перед реверсивным транспортером два фотоэлемента служат для управления системой сигнализации о направлении движения очередного проходящего мимо них изделия. Сигнал на выходе системы должен быть равен "I", если последнее изделие двигалось влево и "О", если изделие двигалось вправо.
9. По роликовому конвейеру I перемещается мебельный щит;
в первом положении, когда его передняя кромка окажется в зоне инструмента прижимная линейка с помощью пневмоцилиндра прижимает движущуюся шлифовальную ленту к поверхности щита. Во втором положении, когда задняя кромка его выходит из зоны инструмента, прижимная линейка отводит ленту, от обрабатываемой поверхности. В установке применяется пневмоиилиндр одностороннего действия (обратный ход поршня происходит за счет пружины), поэтому выходной сигнал должен быть один - команда на перемещение поршня вниз.
10. При отсутствии воды в баке, насос подает в него воду, при достижении водой верхнего уровня, насос отключается; новое включение насоса происходит при достижении водой нижнего уровня и т.д.
11. Синтезировать схему управления реверсивным транспортером. Управление электроприводом транспортера осуществляется при помощи двух конечных выключателей.
ПРИМЕЧАНИЕ: Задание на лабораторную работу (№ задачи из списка заданий) студенты получают заранее, обычно на предшествующем выполнению данной лабораторной работы занятии.
I. КРАТКИЕ ПОЯСНЕНИЯ
Многотактной системой управления называют систему, в которой выходной сигнал управления в любой момент времени определяется входными сигналами в данный момент и выходными сигналами в предыдущие моменты. Многотактная система управления должна содержать элементы памяти, запоминающие предыдущие значения выходных сигналов. Поэтому она может быть реализована устройством, которое называют автоматом с элементами памяти (т.е. если у комбинационного (однотактного) автомата соединить часть выходов с частью его входов через элементы памяти, то получится многотактная система) или последовательными устройством (автоматом). Сигналы с элементов памяти называют промежуточными.
Простейшими примерами многотактных систем являются триггеры, счетчики, регистры. Промышленность производит микросхемы, реализующие как простые так и сложные многотактные схемы. Простейщие многотактные устройства (триггеры) в свою очередь могут быть составлены, например, из элементов «И-НЕ».
В качестве примера рассмотрим синтез многотактной системы управления аварийной сигнализацией.
Эта схема должна обеспечить зажигание лампы при превышении предельно допустимой температуры одновременно в двух точках объекта. Выключение лампы должно происходить только при уменьшении температуры до нормальной так же одновременно в двух точках объекта. Сигналы о превышении температуры вырабатываются при помощи двух датчиков.
Синтез многотактных систем управления даже в простейших случаях достаточно сложен, обычно он осуществляется интуитивно, либо при помощи циклограмм. Процедура синтеза облегчается при. применении положений алгебры логики, теории автоматов и теории алгоритмов. В данной работе, для решения задач синтеза многотакных систем управления предлагается оригинальный подход, связанный с составлением дискретной динамической модели (ДДМ) процесса и использованием булевой функции "переход", которая может быть раскрыта (реализована) асинхронным последовательностным автоматом.
Синтез многотактных систем управления осуществляется в несколько этапов:
1. Построение графа состояний и или формирование ДДМ процесса.
2. Формирование булевой функции "переход" на основании ДДМ процесса.
3. Преобразование минимизация и приведение булевой функции "переход" к виду удобному для реализации.
4. Реализация логической функции в заданном базисе элементов.
Рассмотрим эти этапы в соответствии с решением задачи предложенного примера.
1.1. Построение графа состояний и или формирование
ДДМ процесса
Обозначим входные сигналы от датчиков температуры Х1 и Х2, а выходной сигнал У. Состояния системы определяется совокупностью состояний входных и выходных сигналов. Каждое состояние системы на графе (рис. 1) изображается вершиной в виде кружка, в верхней половине которого проставляются значения входных сигналов, а в нижней - выходных. Исходное нулевое состояние определяет вершина 1. Взаимный переход из вершин в вершину обозначается связями в виде линий без стрелок - ребрами. Однонаправленный переход между вершинами обозначается линиями со стрелками - дугами. Например, переходы из вершины 2 и 3 в вершину 4 могут быть только однонаправленными, так как при уменьшении температуры до нормальной только в одной точке лампа не должна выключаться.
Дискретная динамическая модель процесса- (ДДМ) может быть непосредственно получена из графа и представляет собой аналитическое выражение. В ДДМ входят конъюнкции входных сигналов (с инверсиями или без них в зависимости от того, какое значение
принимает входной сигнал в этом состоянии - 0 или 1), а так же

Рис. I. Граф состояний многотактной системы управления
аварийной сигнализацией
стрелки переходов либо линиисвязей, если переход между вершинами взаимный. Однако, как это часто бывает, строить всю ДДМ нет необходимости, нужно построить только ту её часть. в которой выходные сигналы равные единице.
Тогда интересующие нас ДДМ процесса, будет иметь вид:
Х1Х2 + Х1Х2 (Х1Х2 + Х1Х2)
Приписанные к ДДМ У означают, что сигнальная лампа включена в случае, когда сигналы поступают на первой и второй датчики температуры (это выражается конъюнкцией Х1Х2)
или тогда, когда осуществляется переход из состояния Х1Х2 в состояние X1X2 или в состояние Х1Х2 Очевидно, что при достаточном навыке ДДМпроцесса может быть получена непосредственно, т.е. минуя этап построения графа процесса.
1.2. Формирование булевой функции "переход" на основании
ДДМ процесса
Сначала дадим определение булевой функции переход.. Булева функция вида
У = F1 F2 (1)
где F1 и F2 - элементарные не эквивалентные конъюнкции;
Z - внутреннее состояние.
называется функцией (операцией) "переход", которая технически реализуется при помощи асинхронного последовательного автомата. Формулы асинхронного последовательностного автомата, соответствующего (1) имеют вид:
Z=F1 + ZF2 (2)
У = ZF2 (3)
т.е.,другими словами: (1) раскрывается при помощи (2) и (3).
Алгоритм соответствующий булевой функции "переход",, таков: значение булевой функции "переход" равно 1, если значение последующей конъюнкции (F2) равно 1, после того, как было равно 1 предыдущее значение предшествующей конъюнкции (F1).
Функция "переход" может быть записана в виде
У = F1 F2 F3 …… Fn
т.е. определена через n - знаков перехода, которые могут быть раскрыты "лестницей" асинхронных автоматов.
Z1 = F1 + Z1F2 или Z1 = F1 + Z1F2
Z2 = Z1F2 + Z2F3 Z2 = F2 + Z2F3
……………….. (4) ……………….. (5)
………………. ……………….
Zn = Zn-1 Fn-1 + ZnFn+1 Zn = Fn + ZnFn+1
Yn = ZnFn+1 Y = Zn Fn+1
(4) реализуется параллельным соединением автоматов.
(5) реализуется параллельно-последовательным соединением
автоматов.
(2),(3),(4),(5) могут быть реализованы в контактном и
бесконтактном вариантах.
Так например, на основании (2) и (3) получаем:
1) контактную схему
.

2) бесконтактную схему

|
Нетрудно заметить, что при помощи операции «переход» легко описывается R-S - триггер.
Y = F1 F2
Z = F1 + ZF2- формула, соответствующая формуле R - S-триггера
при этом очевидно, что У = Z.
Вернемся к нашему примеру:
На основании ДДМ процесса сформируем булеву функцию "переход"
Y = X1X2 + X1X2 (X1X2 + X1X2)
1.3. Преобразование, минимизация и приведение булевой функции "переход" к виду, удобному для реализации
Наосновании закона идемпотентности имеем:
Y = X1X2 (X1X2 + X1X2)
Так как У = 1 в состоянии определяемом конъюнкций X1X2 или при переходе из него в состояние X1X2 + X1X2, то У = Z. т.е.
Y = X1X2 (X1X2 + X1X2)
Раскрываем предыдущее выражение через асинхронный последовательностный автомат
Y = X1X2 + Y (X1X2 + X1X2)
Раскроем скобки и последовательно осуществим объединение конъюнкций совместно с операцией склеивания
Y = X1X2 + Y X1X2 + YX1X2 = Х2(X1 + Y X1 ) + YX1X2 =
= Х2(X1 + Y) + YX1X2 = X1X2 + Y X2 + YX1X2 =
= X1X2 + Y X2 + YX1
Применим к полученному выражению двойное отрицание и закон де Моргана
Y = X1X2 + Y X2 + YX1 = X1X2 Y X2 YX1
Таким образом, многотактную схему рассматриваемого примера можно реализовать на элементах «И-НЕ».
1.4. Реализация многотактной системы управлении в заданном базисе элементов
Синтезированная схема сигнализации представлена на рис.1.
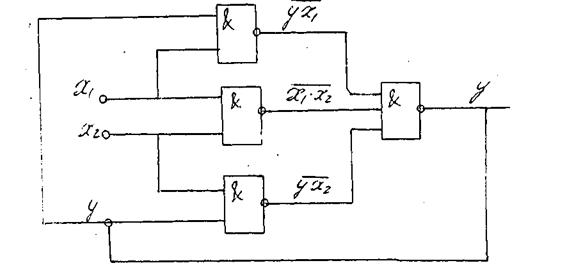
Рис. I
2. ОПИСАНИЕ ЛАБОРАТОРНОГО СТЕНДА
Лабораторная установка состоит из одного стенда. На лицевой панели стенда имеются изображения наборов различных логических элементов, реализованных на микросхемах серии KI55 (К555, К1533 и т.д.) а так же светодиоды, тумблеры, изображения генератора импульсов и одновибратора, встроенных в стенд, источники информационных сигналов и др. Питание на стенд подается при помощи тумблера S1(при этом загорается сигнальная лампа), тумблер S2 - подает питание на генератор тактовых импульсов и одновибратор, S2 включается лишь в случае необходимости.
В качестве R-S триггеров можно использовать J-K и Д-триггеры, у которых коммутируются только инверсные установочные входы R и S.Другой способ получения R-S -триггера - использование информационных входов J-К-триггера, причем вход Jиграет роль входа S, и вход K соответствует входу R. В последнем случае на тактирующий вход необходимо подавать сигнал от расположенного на стенде генератора синхро-импульсов. R-S триггер можно получить и при помощи двух элементов И-НЕ.
Информационные сигналы формируются от источника логического нуля, обозначенного знаком "-", при помощи тумблеров, имеющих три гнезда подключения (тумблеры формирования генератора логических. О и I). При формировании генератора 0 и I следует учесть, что подача сигнала на вход любого элемента с "пустого" места, соответствует подаче на него логической единицы.
3. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
Задание на лабораторную работу (№ задачи из списка задания студенты получают заранее, обычно на предшествующем выполнению лабораторной работы занятии.
Синтез системы управления выполняют по рассмотренным выше этапам. Полученную схему реализуют на стенде. Входные сигналы формируют от источника "-" при помощи тумблеров, а выходные - подаются на светодиоды. Проверку работоспособности синтезированной системы осуществляют, изменяя значения входных сигналов. Перед непосредственным выключением стенда, необходимо пригласить преподавателя для проверки схемы.
4. ОТЧЕТ ДОЛЖЕН СОДЕРЖАТЬ
1. Цель работы.
2. Словесную запись задачи синтеза.
3. Граф состояний и (или ДДМ процесса).
4. Булеву функцию "переход" и ее раскрытие при помощи формул асинхронного последовательного автомата, упрощенную и приведенную к заданному базису элементов синтезированную схему,•а так же ее релейно-контактный эквивалент.
5. Выводы по работе.
КОНТРОЛЬНОЕ ВОПРОСЫ
1. Что понимают под многотактной системой управления. Чем она отличается от однотактной системы?
2. Что понимают под булевой операцией переход? Какое она имеет отношение к асинхронному последовательностному автомату?
3. Какова методика синтезирования многотактных систем управления?
4. Что понимают под дискретной динамической моделью?
5. Какова аналитическая формула, таблица состояния и таблица возбуждения R-S-триггера?
6. В чём заключается отличие R -S-триггера, реализованного на элементах «И-НЕ» от R -S -триггера, реализованного на элементах «ИЛИ-НЕ».
7. Как строится граф состояний процесса?
8. Какова методика перевода контактных схем в бесконтактный вариант? Привести пример.
9. Что понимают под Д-триггером? Какова его таблиц истинности?
10. Как реализовать кольцевой регистр сдвига на 4-х Д-триггерах?
11. Что понимают под J-Kтриггером и какова его таблица истинности?
12. Как вывести из таблицы состоянии R -S триггера его аналитическую формулу ?
13. Как составляется дискретная динамическая модель процесса?
14. Как реализовать делитель частоты на четыре при помощи Д-триггеров; J- К - триггеров?
Лабораторная работа № 7
Дата добавления: 2015-07-25; просмотров: 180 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Лабораторная работа №6.2 | | | Логические элементы автоматики |