|
Читайте также: |
Исследование системы двух позиционного регулирования температуры
1 ЦЕЛЬ РАБОТЫ
Изучить систему релейного двухпозиционного регулирования. Научиться определять качество системы регулирования по графику переходного процесса.
2 ОСНОВНЫЕ ПОЛОЖЕНИЯ
Позиционное регулирование часто встречается в сельскохозяйственном производстве. Этот вид регулирования достаточно просто реализуется. Различают двух и трех позиционное регулирование. Двухпозиционное регулирование характеризуется двумя положениями - «включено» и «выключено» и наличием исполнительного механизма, который работает как единое целое.
Если целью регулирования является поддержание определенного температурного режима и объект автоматического регулирования описывается апериодическим звеном первого порядка, то кривые нагрева и охлаждения представляют собой отрезки экспонент.
САР двухпозиционного регулирования может работать и автоколебательном режиме.
Выбор позиционного регулятора ориентирован на определенное соотношение времени транспортного запаздывания к постоянной времени объекта:
 (1)
(1)
Если соотношение (1) > 0,2 – то предпочтение следует отдать другим способам регулирования (непрерывному или импульсному).
Качество регулирования САР оценивается по быстродействию и точности регулирования в соответствии с основными показателями: время регулирования, перерегулирование, максимальный динамический выброс, статическая и динамическая ошибка, колебательность, характер переходного процесса, запас устойчивости.
Позиционное регулирование характеризуется дифференциалом (либо амплитудой автоколебаний) продолжительностью включения (временем включения), временем отключения (пауза), периодом.
Как правило, САР, реализующие позиционное регулирование, строятся в соответствии с принципом автоматического управления (регулирования) по отклонению.
Распространение получили следующие позиционные регуляторы:
- двухпозиционные – ПТР-2, РТ-2, ЭРА. ТЭ3ПЗ, Щ4500, Т419М, фирмы «Овен», фирмы «Сименс» и др.;
В комплект регулятора входят электронный блок и датчик. Перечисленные регуляторы, кроме Щ4500, аппаратного типа. Щ4500 – приборного типа. Регуляторы ПТР комплектуются термисторным датчиком типа ММТ. Каждый датчик регулятора типа ПТР подобран к регулирующему блоку индивидуально и он имеет одинаковый номер с электронным блоком (на корпусе датчика и блока). Регуляторы типа РТ. ТЭ3ПЗ, Т419 комплектуются проволочными термометрами сопротивления марки ТСМ и ТСП. Подбор проволочного датчика осуществляется в соответствии с его группой. Группа датчика представляет собой шифр его статической характеристики. Выделяют группы: Гр 20, Гр 21, Гр 22, Гр 23, 50М. 100М. 50П. 100П и др. Миллирегулирующий вольтметр Щ4500 имеет релейный выход и комплектуется генераторным датчиком - термопарой.
Кроме указанных выше регуляторов широкое распространение в сельском хозяйстве и перерабатывающей промышленности получили дилатометрические регуляторы – типа ТУДЭ и биметаллические – типа ДТКБ.
3 ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ
Функциональная схема САР представлена на рисунке 1. Объектом управления, в котором осуществляется стабилизация температурного режима, является внутренний объем (часть материального мира) воздуха лабораторного стенда. Канал регулирования в данном случае «мощность теплового потока – температура воздуха». Исполнительным механизмом (устройством) является нагреватель, в качестве которого для наглядности используются лампы накаливания, расположенный внутри корпуса лабораторного стенда. На стенде смонтированы несколько регуляторов – Т419, ТЭ3ПЗ, ТЭ4ПЗ, Щ4500 и др. с соответствующими датчиками. В верхней части стенда смонтирован контрольный термометр. На передней части стенда расположены промежуточные реле, магнитные пускатели и автоматический выключатель для подачи напряжения на лабораторный стенд. На панели имеются клеммы для подвода питания к электронному блоку регулятора и выходные клеммы выходного реле регулятора.
На правом боку имеется смотровое окно, позволяющее наблюдать за состоянием исполнительного механизма и расположением датчиков в пространстве.
4 ПОРЯДОК ВЫПОЛНЕНИЯ ЛАБОРАТОРНОЙ РАБОТЫ
1. Ознакомиться с лабораторной установкой и приборами, расположенными на стенде. Записать марки основных приборов.
2. Изучить устройство и принцип работы регуляторов.
3. Собрать схему рисунок 2. Эксперимент проводится с одним из регуляторов на стенде, выбранным преподавателем.
4. После проверки схемы преподавателем установить заданную температуру и дифференциал и записать их. Записать показания контрольного термометра (начальная температура).
5. Приготовить таймер к работе.
6. Включить установку под напряжение и снять кривую нагрева, записывая в таблицу показания контрольного термометра и амперметра через каждые 2 минуты до срабатывания регулятора, а затем, по мере срабатывания - температуру и время. Эксперимент продолжается до тех пор пока температура не установится (не менее 15-ти срабатываний).
7. Построить кривую нагрева и предоставить её преподавателю для проверки. Оценить качество регулирования САР. Если переходный режим явно выражен, то оценить: время регулирования, перерегулирование, максимальный динамический выброс, колебательность, статическую ошибку. Для квазиустановившегося режима оценить амплитуду колебаний, статическую ошибку, продолжительность включения (время включения tв, время отключения tj, время цикла tц):
ПВ=  (2)
(2)
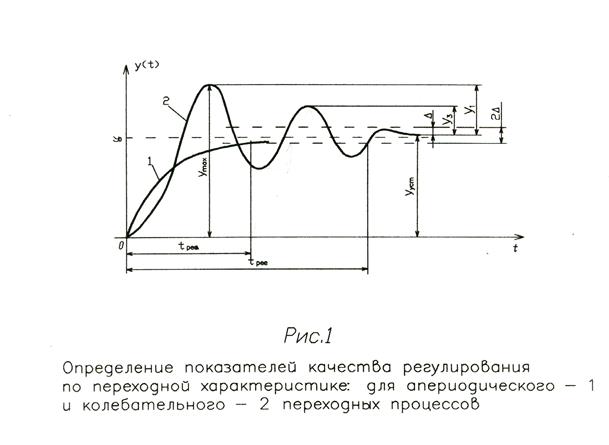
Качество регулирования САР характеризуется двумя основными показателями: быстродействием и точностью. Оно определяется динамическими свойствами объекта управления, типом регулятора и его настройкой. Качество процесса регулирования оценивают в динамическом (переходном) и статическом (установившемся) режимах работы САР. Основные показатели, характеризующие качество процесса регулирования, можно определить из графика переходного процесса (переходной характеристике) (рис. 3), получаемого в результате ступенчатого возмущающего воздействия f(t) на САР. При этом, переходной процесс может быть апериодическим (кривая 1) или колебательным (кривая 2). Рассмотрим эти показатели.
Динамическое отклонение у1 характеризует максимальное отклонение регулируемой величины от установившегося значения ууст, За ууст принимают такое значение регулируемой величины, которого она достигает по истечении достаточно большого промежутка времени с момента приложения к САР входного воздействия.
Перерегулирование σ – это динамическое отклонение, отнесенное к установившемуся значению регулируемой величины, выраженное в процентах и характеризует степень удаленияСАР от границы устойчивости
 , (1)
, (1)
где уmax – максимальное значение регулируемой величины.
Время регулирования tрег характеризует быстродействие САР. Это время от начала приложения внешнего воздействия к САР до вхождения регулируемой величины в заданную зону допустимых отклонений 2Δ. Значение Δ обычно принимают равным Δ = (0,03…0,05)ууст. Для апериодических переходных процессов на рис. 3 время регулирования обозначено через tрегА. Время регулирования зависит от свойств ОУ, выбранного закона регулирования и параметров настройки регулятора.
Коэффициент затухания определяется выражением
Ψ = 1 – у3/у1.
Из выражения для Ψ следует, что чем меньше последующее отклонение у3 выходной величины в положительную сторону по сравнению с предыдущим его отклонением у1 в ту же сторону, тем больше затухание колебательного процесса. При незатухающем колебательном процессе у1 = у3 и коэффициент затухания Ψ=0.
Колебательность системы характеризуется числом колебаний n графика переходного процесса относительно установившегося значения ууст за время регулирования tрег. Каждый переход графика кроме первого через линию, проведенную на уровне значения ууст, считается за половину периода колебаний. Так, для графика, приведенного на рис. 3, колебательность составляет n= 0,5∙3=1,5 периода.
8. Сделать выводы по работе и составить отчет.
5 СОДЕРЖАНИЕ ОТЧЕТА
Отчет должен содержать:
- цель работы;
- марки основных приборов;
- схему электрическую принципиальную лабораторного стенда;
- схему САР функциональную;
- таблицу с экспериментальными данными;
- график кривой нагрева;
- график изменения тока;
- показатели, характеризующие качество регулирования;
- выводы по работе.
6. КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Какой принцип регулирования реализован в лабораторной установке? Поясните его работу.
2. Сравните два основных принципа автоматического регулирования на примере лабораторного стенда.
3. В чем суть 2-х и 3-х позиционного регулирования?
4. Как изменится частота включения исполнительного механизма, если увеличить дифференциал регулятора? Как при этом изменится качество регулирования?
5. Чем количественно характеризуется тепловая инерционность датчика температуры, от чего она зависит и как влияет на качество регулирования?
6. Какие виды регуляторов применяются в перерабатывающей промышленности с\х – й продукции? Дайте краткую характеристику области применения.
7. По каким показателям выбирают регулятор и какие виды настроек он имеет?
8. Как зависит характер установившегося процесса САР при изменении зоны неоднозначности? Приведите примеры этих характеристик.
9. Какие позиционные регуляторы выпускаются промышленностью? Приведите примеры и дайте их краткую характеристику.
10. Можно ли заменить датчик регулятора ПТР-3 (и подобных регуляторов) на другой подобный?
ЛИТЕРАТУРА
1.Наладка средств автоматизации и автоматических систем регулирования. Справочное пособие. / А.С. Клюев и др. – М.: Энергоатомиздат, 1989 с. 341-355.
2.Наладка автоматических систем и устройств управления технологическими процессами. Справочное пособие. / А.С. Клюев и др. – М.: Энергия, 1977 с. 352-372.
3.Автоматика на с.х. предприятиях. Справочник. / В.И. Бодров и др. – М.: Россельхозиздат, 1978 с.250-253.
4.Колесов Л.В. Основы автоматики. – М.: «Колос», 1984, с.218-227.
Рисунок 1. Схема функциональная САР.
Рисунок 2. Схема электрическая принципиальная
двухпозиционного регулирования температуры
Дата добавления: 2015-07-25; просмотров: 423 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ТРЕБОВАНИЯ БЕЗОПАСНОСТИ ПО ОКОНЧАНИИ РАБОТЫ | | | Лабораторная работа №6.3 |