Читайте также:
|
Магнитный поток при регулировании скорости уменьшают по сравнению с номинальным за счет снижения тока возбуждения, т.к. его увеличение выше вышеноминального вызывает дополнительный нагрев обмотки возбуждения. Двигатель рассчитывается и конструируется таким образом, что бы его магнитная система была близка к насыщению, поэтому увеличение тока возбуждения не приводит к заметному увеличению магнитного потока.
Уменьшение магнитного потока приводит к увеличению скорости идеального х/х ω0. Ток короткого замыкания Iк.з.=U/Rя, т.е. от магнитного потока не зависит и при его варьировании будет оставаться неизменным.Значит, электромагнитные характеристики будут иметь вид рис. а.
Момент короткого замыкания Мк.з.=kФIк.з., т.е. при уменьшении магнитног потока Ф он будет также снижаться, т.к. Iк.з.=const. Значит, механические характеристики двигателя будут иметь вид прямых(рис. Б).

Показатели данного способа регулирования: диапазон регулирования 3-4; направление регулирования – вверх от естественной характеристики; плавность регулирования определяется плавностью тока возбуждения; стабильность скорости достаточно высокая. Способ экономичен.
Диапазон регулирования скорости небольшой (2…3). Причина этого заключается в снижении жесткости характеристик по мере увеличения Rа. Направление регулирования скорости - вниз от естественной характеристики. Плавность регулирования скорости определяется характером изменения Rа. Если это сопротивление изменяется плавно, то данный способ обеспечивает плавное регулирование скорости. Чаще же рассматриваемый способ обеспечивает ступенчатое регулирование скорости. Стабильность скорости снижается по мере увеличения диапазона регулирования, т. к. уменьшается жесткость регулировочныххар-ик.
Потери мощности в цепи якоря ∆Pя определяются разностью мощностей: потребляемой из сети P1=Pэл=UI и полезной механической на валу P2=Рмех=Мω =>
∆Pя=UI-Mω=kФω0I-kФIω= kФω0I(ω0-ω)/ ω0=P1δ,
где δ=(ω0-ω)/ ω0 – относительный перепад скорости. При увеличении диапазона регулирования КПД снижается в большой степени.
Характеристика 1 соответствует случаю, когда Rа=0 и является естественной, искуственные характеристики 2-4 построены при наличии в цепи якоря резисторов с сопротивлениями соответственно Rд1<Rд2<Rд3.
 10.Принципы построения замкнутых систем управления электроприводом.
10.Принципы построения замкнутых систем управления электроприводом.
Замкнутые структуры электрического привода строятся по принципам компенсации возмущений и отклонений, называемых также принципом обратной связи.
 Основным признаком замкнутой структуры электрического привода является наличие цепи, по которой на вход электропривода вместе с задающим сигналом скорости Uз.с. подается сигнал Uм=kмMс, пропорциональный моменту нагрузки Мс. В результате этого управления электропривода осуществляется суммарным сигналом U∆, который автоматически изменяется в нужную сторону при колебаниях момента нагрузки, обеспечивая с помощью системы управления поддержание скорости электропривода на заданном уровне.
Основным признаком замкнутой структуры электрического привода является наличие цепи, по которой на вход электропривода вместе с задающим сигналом скорости Uз.с. подается сигнал Uм=kмMс, пропорциональный моменту нагрузки Мс. В результате этого управления электропривода осуществляется суммарным сигналом U∆, который автоматически изменяется в нужную сторону при колебаниях момента нагрузки, обеспечивая с помощью системы управления поддержание скорости электропривода на заданном уровне.
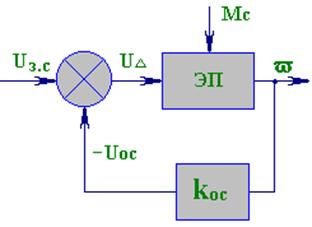 Подавляющее большинство замкнутых структур электропривода строятся по принципу отклонения (обратной связи). Он характеризуется наличием цепи обратной связи, соединяющей выход электропривода с его входом. сигнал обратной связи Uо.с=ko.c.w подается на вход электропривода, где он вычитается из сигнала задания скорости Uз.с..
Подавляющее большинство замкнутых структур электропривода строятся по принципу отклонения (обратной связи). Он характеризуется наличием цепи обратной связи, соединяющей выход электропривода с его входом. сигнал обратной связи Uо.с=ko.c.w подается на вход электропривода, где он вычитается из сигнала задания скорости Uз.с..
Управление электропр. осуществляется сигналом отклонения UD=Uзс – Uос
Все виды обратных связей делятся на положительные и отрицательные, линейные и нелинейные, жесткие и гибкие.
П называется такая обратная связь, сигнал которой направлен согласно (складывается) с задающим сигналом, в то время как сигнал О связи направлен ему встречно.
Ж обратная связь характеризуется тем, что она действует как в установившемся, так и в переходном режимах электропривода. Сигнал Г обратной связи вырабатывается только в переходных режимах электропривода и служит для обеспечения требуемого их качества, например устойчивости движения, допустимого перерегулирования и т.д.
Линейная обратная связь характеризуется пропорциональной зависимостью между регулируемой координатой и сигналом обратной связи Uо.с
Дата добавления: 2015-09-05; просмотров: 199 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Регулирования частоты вращения асинхронного двигателя. | | | Замкнутые системы ЭП с двигателем постоянного тока. |