Читайте также:
|
Ультразвуковой (УЗ) метод контроля обеспечивает возможность разработки алгоритмов и создание аппаратурных средств, позволяющих осуществлять поиск в бетонных и железобетонных конструкциях различного типа дефектов путем визуализации внутренней структуры объектов контроля. Основным является эхоимпульсный метод, обеспечивающий диагностику строительных конструкций (СК) из указанных материалов при условии одностороннего подхода к их поверхности, что зачастую является единственной возможностью осуществления контроля.
Бетон и железобетон являются весьма сложными объектами контроля с характерными особенностями. Существенная неоднородность их внутренней структуры вызывает сильное рассеяние энергии УЗ-импульсов и является причиной очень высокого уровня структурных помех, препятствующих приему полезных сигналов. Специфика структурных помех состоит в том, что они являются нестационарным случайным процессом, значения которого в одинаковые моменты времени разных периодов приема сигналов полностью корректированы между собой при неизменных параметрах зондирующего сигнала, а также положениях излучателя и приемника УЗ-колебаний.
Структурная реверберация, в частности, в бетоне, представляет собой многократные переотражения ультразвуковых волн между элементами крупного заполнителя, сопровождающиеся взаимной трансформацией продольных колебаний в поперечные и обратно. Как правило, размеры отдельных элементов заполнителя и расстояния между ними соизмеримы с длиной УЗ-волны, поэтому энергия зондирующего импульса, излученная в бетон, в основном рассеивается на неоднородностях, расположенных в окрестности точки излучения, и лишь частично расходится к более удаленным слоям материала. В результате акустический шум, принимаемый УЗ-преобразователем, затухает с момента излучения зондирующего импульса существенно медленнее, чем предсказывает расчет, не учитывающий вторичное и более сложное рассеяние. Реализации структурного шума, получаемые от повторных зондирований при неизменных положениях излучателя и приемника ультразвука, из-за стационарности среды полностью коррелированы между собой в совпадающие моменты времени. Однако при смене положений точек излучения и приема корреляция нарушается. Оценка основных статистических характеристик шума на частотах около 80 кГц по ансамблю реализаций, полученных в разных точках поверхности бетона как совмещенным УЗ-преобразователем, так и парой преобразователей при неизменном расстоянии между ними, показывает, что структурный шум - это нестационарный случайный процесс, у которого в любой фиксированный момент времени (исключая интервал приема сигналов поверхностных волн) закон распределения мгновенных значений структурного шума близок к нормальному с нулевым математическим ожиданием, а дисперсия в интервале 50... 500 мкс от момента излучения зондирующего импульса уменьшается в среднем со скоростью 0,05... 0,1 дБ/мкс.
Обеспечить пространственную селекцию отражателей при ненаправленных УЗ-преобразователях в принципе возможно многоракурсным зондированием каждой точки исследуемого полупространства с его поверхности. Этот метод, находящий в последнее время применение при контроле мелкоструктурных материалов и в медицинской диагностике, физически аналогичен фокусировке УЗ-излучения в каждую точку полупространства и фокусированному приему сигналов, отраженных от каждой зондируемой точки, и практически осуществляется путем сканирования поверхности полупространства УЗ-преобразователями, синтезирующими приемно- излучающую апертуру больших волновых размеров. Данный метод синтезированной апертуры, фокусируемой в произвольную точку полупространства с коге-рентной обработкой данных, можно отнести к одной из разновидностей многочастотной голографии. В литературе он известен как метод SAFT (Sinthetic Aperture Focusing Technique). При его использовании продольное разрешение (по глубине) в первом приближении определяется пространственной протяженностью акустического импульса, а в поперечном (по фронту) близко к длине акустической волны.
Решение задачи обнаружения полезных сигналов на фоне структурного шума гармонично сочетается с решением задачи пространственной селекции отражателей методом SAFT. Действительно, поскольку нельзя существенно декоррелировать реализации структурного шума, полученные при неподвижных УЗ-преобразователях, изменением параметров зондирующего импульса, то практически остается лишь возможность пространственного накопления сигнала при облучении отражателя и приеме эхосигналов с разных направлений на отражатель с поверхности объекта контроля, что и осуществляется в методе SAFT. Но для пространственного накопления сигнала с целью увеличения отношения сигнал/шум (с/ш), естественно, требуется возможно большее число некоррелированных реализаций принятых колебаний, тогда как для осуществления лишь пространственной селекции (при отсутствии помех) синтезируемая апертура может быть разреженной.
Для получения наибольшего числа некоррелированных реализаций необходимо правильно выбрать шаг сканирования УЗ-преобразователями поверхности полупространства при синтезе апертуры (или шаг антенной решетки) и размеры активной поверхности преобразователя (элемента решетки).
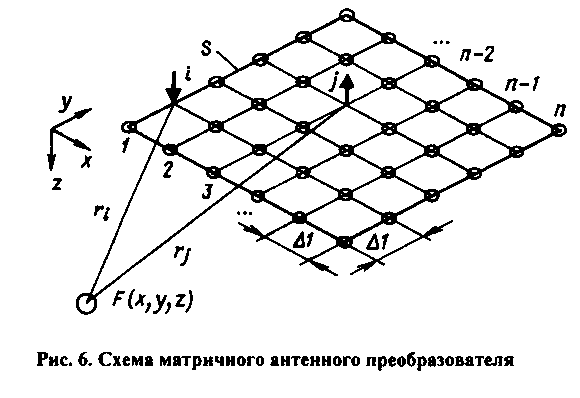
На рис. 6 схематично показан антенный преобразователь, выполненный в виде двухмерной матрицы элементарных точечных преобразователей, расположенных с шагом Д1 (в первом приближении много меньшим длины волны) на поверхности объекта в пределах апертуры S. Каждый из элементарных преобразователей может как излучать, так и принимать ультразвуковые колебания. Несфокусированный совмещенный антенный преобразователь эквивалентен параллельному включению всех этих элементов, а для обеспечения фокусировки в произвольную точку F следует обеспечить возможность независимой фазировки каждого из элементов. Под фазировкой понимается создание для каждого элемента такой задержки (в электрическом или акустическом тракте) при излучении и приеме сигнала, чтобы возбуждаемые одним электрическим импульсом акустические сигналы от всех элементов одновременно приходили в точку F’, а отраженные от нее сигналы после приема всеми преобразователями суммировались бы синфазно.
Для эхоимпульсного метода применительно к контролю бетона такая фазировка может осуществляться в цифровом виде на основе модифицированного метода SAFT-С, который отличается тем, что исходные реализации получают не только от каждого элементарного преобразователя антенной решетки (АР), работающего в совмещенном режиме, но и вместе с этим используются все сочетания пар преобразователей, расположенных в пределах апертуры. При этом, как нетрудно видеть, общее число получаемых некоррелированных эхореализаций М (включая совмещенный режим), составит:
М = n(n +1)/2,
где n - общее число элементов в апертуре.
В этом случае общее число получаемых реализаций эхосигнала будет примерно в n / 2 раз больше, чем для метода SAFT. Это обеспечит больший выигрыш для когерентного накопления полезных сигналов, что необходимо при контроле бетона из-за высокого уровня шумов в одиночной реализации.

При использовании метода SAFT-С для каждой точки F с координатами х, у, z в реконструируемой плоскости рассчитывается величина условного коэффициента отражения по формуле:
где i - номер передающего элемента; j - номер приемного элемента; A(θ i, θ j) - весовой коэффициент, учитывающий влияние диаграмм направленности передающего и приемного элементов; Uij(t) - временная эхоимпульсная реализация, для соответствующей пары преобразователей; to - время постоянной аппаратной задержки в приемном тракте; rj - - расстояние от передающего элемента до точки фокусировки; г, - расстояние от приемного элемента до точки фокусировки; с - скорость УЗ-волн.
Предельный выигрыш в отношении сигнал/шум (с/ш), определяемом через напряжение (что эквивалентно яркости результирующей томограммы), при условии когерентного накопления сигнала и некоррелированной помехи составит:


При достаточно больших значениях п можно считать:
Таким образом, в первом приближении, для метода SAFT-С выигрыш с/ш относительно одиночной реализации прямо пропорционален числу элементов АР. Следует учесть, что дополнительный выигрыш без увеличения числа элементов АР можно обеспечить совместной обработкой сигналов, полученных для нескольких неперекрывающихся положений апертуры на поверхности объекта.

Общее число элементов n АР определяется размерами апертуры и шагом установки в ее пределах элементарных преобразователей, которые, в свою очередь, зависят от радиуса г корреляции структурного шума. Радиус корреляции г определяет такой минимальный размер круговой области на поверхности контролируемого пространства, при котором реализации шума (при отсутствии дефектов), принятые из точек в центре и на границе области при неподвижном излучателе, практически некоррелированы. Меньший, чем г шаг, использовать бесполезно, так как дополнительного накопления сигнала от новых реализаций входных колебаний практически не будет, а общее число реализаций возрастет.
Рис. 7. Радиус корреляции структурной помехи
Изложенное выше поясняет рис. 7.
Здесь схематично изображены точечные передающий Т1 и приемные R2, R3 преобразователи, установленные на поверхность бетона. УЗ-импульс, излученный преобразователем Т1 распространяется в объеме и, отражаясь различными путями от структурных неоднородностей k, принимается преобразователями R2, R3 разнесенными на расстояние Dx. Очевидно, что оба принимаемых сигнала будут идентичны и когерентны при Dx = 0. При увеличении Dx они будут декоррелироваться за счет изменения пути прохождения УЗ-волн: для случая однократного рассеяния - пути 1 - 2 и 1 - 3, а для случая многократного - пути 4-5-6 и 4-5-7, сумма которых и образует структурный шум. В пределе, при Dx более определенной величины, принимаемые сигналы должны полностью декоррелироваться. График статистически усредненной зависимости коэффициента взаимной корреляции двух принимаемых реализаций как функция величины Dx представляет собой плавную кривую, убывающую от 1 до 0. Значение Dx, при котором коэффициент взаимной корреляции падает до величины 0,25, соответствует радиусу корреляции структурной помехи.
Величина радиуса корреляции зависит не только от степени неоднородности полупространства (от материала и размеров зерен крупного заполнителя бетона), но и от спектральной плотности структурного шума, зависящей, в свою очередь, от характеристик зондирующего сигнала и, естественно, от акустических свойств среды, вследствие изменения затухания от частоты.
В частности, для наиболее широко распространенного строительного бетона марки 400 радиус корреляции г примерно равен 10... 12 мм. Следовательно, для приема некоррелированной реализации расстояние между преобразователями должно быть не более 12 мм.
При построении поисковых ультразвуковых средств необходимо максимально учитывать основные требования к SAFT для обеспечения наибольшего отношения с/ш в получаемой томограмме:
1. Синтезируемая апертура должна быть заполненной, то есть вся поверхность контролируемого объекта, ограниченная крайними элементами апертуры, должна быть активной;
2. При получении и приеме сигналов должна использоваться каждая пара элементов апертуры из всех возможных (попарных) комбинаций независимо друг от друга, а также каждый элемент в паре с собой. Такое зондирование можно назвать комбинационным.
Первое из этих требований означает, что каждая область поверхности исследуемого полупространства, попадающая в пределы синтезируемой апертуры, должна использоваться для излучения и приема УЗ-колебаний и вносить вклад в суммарный эхосигнал.
Второе требование максимизирует количество некорреляционных (по шуму) реализаций входных колебаний, которое можно получить от имеющегося ограниченного числа элементов апертуры.
Сформулированные выше положения обеспечивают разработку поисковых средств акустической томографии для диагностики бетонных и железобетонных конструкций, а также изделий из структурно-неоднородных материалов, обеспечивающих контроль при одностороннем доступе к поверхности контролируемых объектов и позволяющий получить томограммы В и С срезов.
Современная поисковая акустическая аппаратура основана на импульсном эхометоде с интегрированием апертуры комбинационным зондированием (SAFT-С) и включает антенное устройство на базе 36-элементной матричной АР, блок пространственно-временной обработки сигналов (антенный процессор) и ЭВМ.

На рис. 8 показаны результаты работы поисковой аппаратуры в виде томограмм типа В, визуализирующих внутреннюю структуру железобетонной конструкции.
Представленные изображения легко интерпретируются. Возможность быстрого послойного просмотра визуализируемого объема материала с представлением томограмм как В, так и С типа, облегчает идентификацию протяженных дефектов, например, трещин, полостей, расслоений, а также донных поверхностей.
Поисковая ультразвуковая аппаратура позволяет обнаруживать в бетоне локальные дефекты, сравнимые по размерам с длиной волны ультразвуковых колебаний. Размер зерен крупного заполнителя бетона определяет естественный предел чувствительности прибора. Протяженные дефекты обнаруживаются с лучшим отношением сигнал-шум.
Наряду с контролем внутренней структуры бетонных и железобетонных конструкций, ультразвуковые поисковые аппаратурные средства, основанные на эхо- методе, позволяют осуществлять диагностику стеклопластиков, композитов, пластмасс, керамики и других материалов, контроль которых возможен только на низких УЗ-частотах.
Дата добавления: 2015-09-06; просмотров: 209 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| МЕТОДЫ И СРЕДСТВА ПОИСКОВЫХ СИСТЕМ РАДИАЦИОННОЙ ИНТРОСКОПИИ | | | ПОИСКОВЫЕ СРЕДСТВА НА ОСНОВЕ ТЕПЛОВИЗИОННОГО МЕТОДА |