Читайте также:
|
Исполнительные механизмы изготовляются в виде цилиндра I, в котором перемещается поршень 2 под давлением рабочей среды, нагнетаемой в цилиндр насосом или от системы компрессор— рессивер (рис. 4.19).
Управление потоком рабочей среды осуществляется золотниковым усилителем 3, который в стационарном оборудовании
чаще всего перемещается в обе стороны электромагнитами Y1, Y2 4. При обесточенных электромагнитах 4 золотник 3 удерживается в среднем нормальном положении пружинами 5, закрывая нагнетательный канал 6 с рабочей средой и каналы 7 сливной магистрали.
При включении электромагнита Y1 золотник переместится вправо, рабочая среда под давлением Ρ будет поступать в левую поршневую полость цилиндра и поршень 2 со штоком 8 переместится вправо. Отработанная среда из правой штоковой полости цилиндра через правый канал 7 уходит в сливную ма-
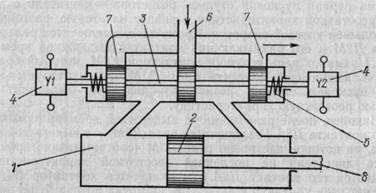
Рис. 4.19. Гидроцилиндр с золотниковым управлением
гистраль. При выключении электромагнита Y1 и включении Y2 произойдет реверс влево исполнительного механизма с тянущим перемещением нагрузки на штоке поршня.
В мобильных лесных машинах золотники обычно перемещаются при помощи механической передачи с ручным приводом.
Максимальное усилие F, развиваемое исполнительным механизмом, без учета сил трения поршня 2 по цилиндру 1
F = SP, (4.32)
где S — эффективная площадь поршня; Ρ — давление рабочей среды в магистрали 6.
При прямом (толкающем) ходе поршня
При обратном (тянущем) ходе поршня
где D — диаметр поршня; d — диаметр штока 8.
Для идеального гидроцилиндра скорость поршня
ν = К ц Q ц, (4.33)
где К ц =1/ S; Q ц — количество рабочей среды (масла), посту-
пающей в гидроцилиндр в единицу времени. Определим характер динамики исполнительного механизма. С учетом утечек формула (4.33) примет вид
(4.34)
где

— эластичность механической характеристики;
(4.35)
где К с — суммарный коэффициент гидравлических потерь; С — коэффициент средних гидравлических потерь (С = 1,25... 1,65). Формулу (4.32) преобразуем:
где т — масса, приведенная к штоку поршня; l — перемещение штока.
Подставив это уравнение с учетом (4.35) в формулу (4.34), получим

(4.36)

(4.37)
где Т м — механическая постоянная гидроцилиндра.
С учетом сжимаемости жидкости дифференциальное уравнение движения исполнительного механизма в операторной форме имеет вид
[ Т Г Т М Р3 + Т м Р 2 + Р ] l = К ц Q ц, (4.38)
где Т Г= v/EK C C гидравлическая постоянная времени; Ε — при-
веденный модуль упругости жидкости и трубопроводов, определяемый по формуле Жуковского; Р=d/dt - оператор дифферен-
цирования.
Величина давления рабочей среды Ρ и количество ее, поступающее в гидроцилиндр в единицу времени Q ц, определяют мощность исполнительного механизма:

где η — КПД.
Дифференциальное уравнение по скорости перемещения поршня

(4.39)
Статическая характеристика ИМ
v = К ц Q ц.
Наряду с золотниковым управлением пневматический ИМ цилиндр — поршень может иметь усилитель типа сопло-заслонка или струйная трубка.
В системах гидропневмоавтоматики используются также ИМ цилиндр — поршень с вращательным однооборотным регулирую-
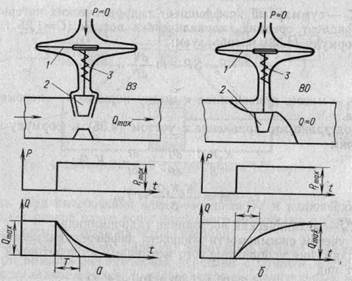
Рис. 4.20. Пневматические мембранные клапаны
щим органом. В этом случае шток поршня превращен в систему шатун — кривошип. Наряду с гидропневмоцилиндрами поступательные перемещения регулирующего органа реализуются мембранными исполнительными механизмами. Это в основном гидравлические, пневматические клапаны типа МИМ, ПОУ, К, Кр и др. в различных системах регулирования.
На рис. 4.20 показаны пневматические мембранные клапаны ВО и ВЗ. При подаче давления сжатого воздуха Ρ мембрана 1 будет деформироваться и, сжимая пружину 3, перемещать запорное устройство 2 вниз. При этом у клапана ВО (рис 4 20 б)
открывается проходное сечение, у клапана ВЗ — закрывается. Динамика мембранных клапанов описывается дифференциальным уравнением
(4.40)
где Тм — механическая постоянная времени, связанная с инерционностью прогиба мембраны и сжатия пружины; Q — расход вещества через клапан; k — коэффициент усиления; Ρ — давление воздуха для открытия (закрытия) клапанов. Клапаны бывают с прямолинейной статической характеристикой Q = kP при k = const и параболической характеристикой при k ≠ const.
Дата добавления: 2015-08-27; просмотров: 170 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ШАГОВЫЕ ДВИГАТЕЛИ И ЭЛЕКТРОМАГНИТНЫЕ МУФТЫ | | | И ОБЪЕМНЫМ УПРАВЛЕНИЕМ |