Читайте также:
|
Ответ: Радиолокацией называется обнаружение, определение координат и параметров движения различных объектов (целей), отражающих или излучающих радиоволны. Термин «локация» происходит от латинского location - размещение, расположение. Комплекс радиоэлектронных устройств, выполняющих эту задачу, называется радиолокационной станцией (РЛС) или радиолокатором. В английской и американской литературе - radar (radio detection and ranging) - радиообнаружение и определение расстояния.
Радиолокационной станцией, или радиолокатором, называется устройство, предназначенное для обнаружения объектов и определения их координат с помощью радиоволн, отражающихся от этих объектов.
Для обнаружения объектов достаточно осуществить излучение радиоволн и их прием после отражения от этого объекта. Но для определения координат (направления и расстояния) необходимо знать, в каком направлении происходит излучение и прием радиоволн и в течение какого времени они распространяются до объекта и обратно.

Следовательно, РЛС должны иметь приемо-передающее устройство, обеспечивающее направленное излучение и прием, и индикаторное устройство, определяющее координаты. Чтобы во время приема слабо отраженных сигналов не было помех от собственно го излучения, его обычно осуществляют в виде кратковременных посылок-импульсов, в промежутках между которыми принимают отраженные сигналы (эхо-сигналы). В связи с
этим в РЛС должно быть синхронизирующее устройство, обеспечивающее согласование и периодичность работы всех ее узлов.
Общее представление о работе импульсной РЛС и взаимодействии отдельных ее узлов можно получить при рассмотрении упрощенной блочной схемы (рис. 5).
Синхронизатор периодически запускает передатчик и одновременно с ним индикатор. Мощный кратковременный импульс высокочастотных колебаний, вырабатываемый передатчиком, поступает в антенну и излучается ею в заданном направлении в виде узкого луча. После отражения от объекта слабый высокочастотный импульс возвращается к антенне и подается на вход приемника (при излучении импульса приемник находится в запертом состоянии).
Для упрощения конструкции РЛС одну и ту же антенну используют как для излучения, так и для приема. Подключение антенны к передатчику или приемнику производят с помощью антенного переключателя. После усиления в приемнике импульс детектируется и поступает на индикатор. Так как начало работы индикатора совпадает с моментом излучения импульса по направлению к объекту, то, зафиксировав по индикатору момент прихода отраженного импульса, можно определить расстояние до объекта:
R=ctr/2 (2.1)
где R - расстояние до объекта, м;
tr - время распространения радиоволны до объекта и обратно (отрезок времени с момента излучения импульса до момента прихода отраженного сигнала), с;
с - скорость распространения радиоволн (приблизительно равна 3 • 108 м/с = 300 ООО км/с).
Подставив в формулу (2.1) значение с, выраженное в метрах на микросекунду, а /я - в микросекундах, получим
К = 150 Гд.
Для получения величины R в морских милях при подстановке времени tr микросекундах используют следующую формулу:
Направление на объект в простейшем случае может быть определено непосредственно по положению антенны в момент приема ею отраженных импульсов. Если при достаточно частой посылке импульсов положение непрерывно вращающейся антенны фиксируется в индикаторе, то по нему можно отмечать одновременно как расстояние до всех отражающих объектов, так и направление на них. Этот принцип, используемый в судовых
РЛС кругового обзора, требует применения специальных электроннолучевых индикаторов, способных отмечать мгновенное положение объектов на экране и, при наличии послесвечения, запоминать эти положения на время оборота антенны.
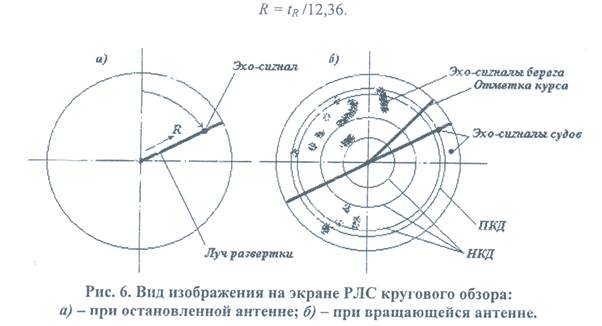
Изображение кругового обзора на экране РЛС получается следующим образом (рис.
В момент излучения импульса радиолокатором электронный луч, вызывающий засветку экрана индикатора, начинает отклоняться с постоянной скоростью по радиусу от центра экрана к его краю (рис. 6, а). Направление отклонения луча задается угловым положением антенны в горизонтальной плоскости а. Приходящий отраженный импульс, поступая в индикатор, вызывает увеличение яркости луча развертки, и на экране индикатора в этот момент появляется ярко светящаяся точка. Расстояние от центра экрана до точки определяет в масштабе расстояние R от РЛС до объекта.
Направление на объект может быть определено по угловому положению луча развертки на экране индикатора, т. е. по углу поворота антенны относительно начальной линии отсчета. Если антенна не вращается вокруг вертикальной оси, а расстояние до объекта не изменяется, то луч развертки каждый раз после излучения импульса будет отклоняться в одном и том же направлении и на экране все время будет видна ярко светящаяся точка с координатами а и К.
При непрерывном вращении антенны, последовательно облучающей окружающие объекты, их положение на индикаторе будет фиксироваться аналогичным способом, но каждый из эхо-сигналов будет появляться в соответствующей точке экрана. Для сохранения свечения каждого эхо-сигнала в течение полного оборота антенны применяют экраны с длительным послесвечением. Поэтому на таком индикаторе можно одновременно наблюдать эхо-сигналы всех окружающих объектов (рис. 6, б).
Различный масштаб изображения на экране индикатора может быть получен при изменении скорости радиальной развертки луча. При большой скорости луч проходит весь радиус экрана за меньшее время, поэтому на экране видны объекты, удаленные на меньшее расстояние, т. е. получается крупный масштаб. При малой скорости развертки на экране можно видеть более удаленные импульсы - шкала индикатора имеет меньший масштаб.
Расстояние до нужного объекта определяют по неподвижным (НКД) и подвижному (ПКД) кругам дальности, создаваемым на самом экране в виде ярко светящихся окружностей.
По числу НКД, уложившихся от центра экрана до объекта, берут грубый отсчет дальности. Совмещая ПКД с объектом, при помощи специального дальномера можно получить достаточно точный отсчет расстояния до объекта.
Направление на объект определяют при помощи механического визира, размещенного над экраном индикатора, или электронного визира, который высвечивается на самом экране. Отсчет направления снимают по азимутальному кругу, обрамляющему экран или связанному с ручкой вращения визира.
Курс своего судна на экране индикатора определяют по отметке курса (ОК), которая получается в виде ярко светящегося радиуса в момент пересечения антенной носового направления судна.
Вопрос №4: Каковы основные характеристики глобальных спутниковых навигационных систем?
Ответ: Принцип работы спутниковой радионавигационной системы основан на использовании спутников как опорных навигационных точек с известными координатами.
Определение места судна с помощью ИСЗ предполагает решение трех отдельных задач: относительную привязку, т. е. нахождение координат судна относительно спутника; определение координат спутника в момент измерения навигационного параметра; вычисление графических координат судна. В зависимости от измеряемых параметров
возможны различные методы определения места судна в спутниковых РНС; угломерный, дальномерный, радиально-скоростной и разностно-дистанционный. В спутниковых РНС, использующих радиально-скоростной и разностно-дальномерный методы определения, наибольшее распространение получил частотный доплеровский метод.
Надежное навигационно-информационное обеспечение судов имеет важное значение для безопасности их плавания, эффективной эксплуатации и предотвращения экологических бедствий. Специфика работы морского, речного и рыбопромыслового флотов определяет необходимость применения таких средств радионавигации и радиосвязи, которые с минимумом затрат обеспечили бы удовлетворение современных и перспективных требований, предъявляемых потребителями в любом районе Земного шара Резолюции ИМО А.815(19) 1995 года установила требования к перспективной глобальной навигационной спутниковой системе (ГНСС) для обеспечения безопасности мореплавания и эффективного и надежного использования ее координатно-временной информации при плавании во всех районах мирового океана, включая узости, подходы к портам, реки и портовые воды (см. таблицу).
Таблица. Перечень минимальных требований морских потребителей к ГНСС
| Параметры | Требование |
| Точность системы в определении местоположения принимающей антенны: | |
| - Абсолютная точность; | - 10м (95%) |
| - Повторяемая точность; | - 14 м (95%) |
| Целостность системы: | |
| - время предупреждения о нарушении работы системы; | 10 сек |
| - пороговое значение нарушения: | 25 м (величина ухудшения точности) |
| Доступность службы: - пороговое значение качества работы: | 99,8% (за 30 дней работы) непреднамеренные перерывы не должны превышать 3 сек. |
| Надежность службы | 99,97% (за 1 год работы) |
| Зона действия службы | глобальная |
| Частота обновления обсервации системы | по крайней мере, каждые 2 сек. |
| Пропускная способность службы | неограниченная |
В настоящее время наиболее полно удовлетворяют требованиям к навигационному обеспечению судоходства СНС GPS и Глонасс при использовании в штатном и дифференциальном режимах работы. Основными достоинствами этих систем при использовании сигналов стандартной точности в штатном режиме работы являются глобальность рабочей зоны, высокие доступность, точность и надежность при непрерывности навигационных определений, а в дифференциальном режиме - возможность повышения точности и надежности навигационных определений в рабочей зоне дифференциальной подсистемы. Погрешности определения местоположения СНС Глонасс и GPS при использовании сигналов стандартной точности в штатном режиме не превышают соответственно 45м и 100м, а в дифференциальном режиме - 10м с вероятностью 95%. Исходя из перспективных возможностей СНС, связанных с совместным использованием систем Глонасс и GPS, а также вводом в эксплуатацию функциональных дополнений СНС, обеспечивающих улучшение основных характеристик СНС за счет реализации дифференциального режима и специальных систем контроля работоспособности СНС и оперативной передачи данных о целостности, указанные системы смогут удовлетворить основные требования морских потребителей к будущей глобальной навигационной спутниковой системе.
Находящиеся в эксплуатации спутниковые навигационные системы Глонасс и GPS в 1996 г. были одобрены ИМО в качестве компонентов Всемирной радионавигационной системы. При одобрении систем Глонасс и GPS ИМО отметила неспособность каждой из них обеспечить в штатном режиме точность, необходимую для безопасной навигации судов на подходах к портам и в других водах, в которых свобода маневрирования ограничена.
Другой отмеченный недостаток этих систем связан с их неспособностью в данное время обеспечивать оперативное оповещение потребителей о нарушениях в работе систем или их элементов, которые происходят пока довольно часто.
Наиболее рациональным путем устранения указанных недостатков и улучшения основных характеристик систем Глонасс и GPS, необходимых для расширения их функциональных возможностей, является применение дифференциального режима работы этих систем, что позволяет добиться повышения точности, надежности и эффективности радионавигационного обеспечения в рабочих зонах дифференциальных подсистем СНС.
Морские дифференциальные подсистемы СНС должны работать непрерывно и возможность получения надежных навигационных определений в реальном масштабе времени с интервалами не более 5-10 с. Погрешности определения места увеличиваются с увеличением расстояния от опорной станции и старением дифференциальных поправок, но они не должны превышать 10м в рабочей зоне с вероятностью 0,95.
При использовании дифференциального режима работы СНС могут быть успешно решены следующие специальные навигационные задачи:
1. обеспечение высокоточного судовождения на внутренних водных путях (реках, озерах и водохранилищах);
2. рыбный промысел в прибрежных водах, узостях и в районах со сложной навигационной обстановкой;
3. высокоточный промер глубин в прибрежных водах и узостях;
4. точное выставление и контроль за местоположением плавучих средств навигационного ограждения, как на море, гак и на реках и в узостях; прокладка кабелей и трубопроводов, как в прибрежных водах, так и в открытом море;
5. геодезические и другие научные исследования в любых районах мира;
В настоящее время в 22 странах развернута опытная эксплуатация около 200 опорных станций дифференциальной подсистемы GPS. Согласно принятой в США программе развития дифференциальной подсистемы, предусматривается развертывание 52 опорных станций, зона действия которых охватывает все прибрежные воды США. 23 таких станции планируется разместить в Канаде, что позволит обеспечить высокоточными навигационными измерениями внутренние водные пути Великих озер, реки Святого Лаврентия.
Ряд стран Балтийского моря (Польша, Финляндия, Швеция, Дания и Эстония) установили сеть опорных станций, зона действия которых охватывает большую часть Балтийского моря.
На основе использования высокоточных средств спутниковой навигации ИМО предполагает осуществить широкое внедрение на морском флоте следующих перспективных систем судовождения:
-авторулевых, обеспечивающих управление по траектории;
-электронных картографических систем (ЭКС); автоматических информационных систем (АИС).
Оснащение ими морских судов предусмотрено проектом новой Главы 5 Международной Конвенции по охране человеческой жизни на море (Конвенции СОЛАС), принятой в 2000 году.
СПИСОК ЛИТЕРАТУРЫ
1.Судовая радиоэлектроника и радионавигационные приборы: Учебник для высших инженерных морских училищ / А. М. Байрашеаекий, А. В. Жерлаков, А. А. Ильин, Н. Т. Ничипоренко, В. Б. Сапегин. - М.: Транспорт, 1988. - 271 с.
2.Судовые радионавигационные приборы. Коновалов В. В., Кузнецова Л. И. Изд-во «Транспорт», 1974 г., 360 с.
3.Шейко Г. М. Судовые электрорадионавигационные приборы и установки управления: Учебник. - Л.: Судостроение, 1987. - 264 с.
4.Власов В. Г., Березенцев Ю. С., Осипов В. И. Электрорадионавигационные приборы и судовая радиосвязь. Учебник для вузов водн. транс гг. - М.: Транспорт, 1984 - 229 с.
5.Судовые средства связи и электрорадионавигации, Обрезумов П. А. М., «Транспорт», 1977, 240 с.
6. Баранов Ю. К. Использование радиотехнических средств в морской навигации. 3-е изд., перераб. и доп. М.: Транспорт, 1988. - 208 с.
ПЕРСПЕКТИВНОЕ ИСПОЛЬЗОВАНИЕ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ НА МОРСКОМ ФЛОТЕ - Ю. Г. Зурабов, зам. генерального директора ГП "Морсвязьспутник
Дата добавления: 2015-09-05; просмотров: 77 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Вопрос № 2: Как работает блокинг-генератор? | | | Аннотация |