Читайте также:
|
Контур позиционирования регулятора является следящей системой, перемещающей исполнительный механизм в положение М, равное заданному значению Мsp на входе контура.
Для изучения принципа действия контура позиционирования необходимо рассмотреть работу контура при изменении сигнала заданного положения Мsp.
Принцип действия контура позиционирования:
- в начальном состоянии сигнал заданного положения ИМ Мsp= 50%;
- начальное положение ИМ М =50%;
- погрешность установки ИМ в заданное начальное положение
ΔМ = Мsp-М= 2%;
- погрешность равна зоне нечувствительности усилителя ΔМ=Db=2%, что допустимо
- выходной сигнал усилителя Uу=0, то есть на электродвигатель ИМ напряжение
не подается и ИМ неподвижен;
- в момент времени t0 сигнал задания ИМ увеличился до Мsp= 70%;
- при пока еще неизменном положении ИМ и, следовательно, неизменном
сигнале Мap=М= 50% на выходе ДПсигнал отклонения положения ИМ от
заданного увеличивается до еМ = Мsp – Мap = 70%;
- в данном случае входной сигнал усилителя Uf=еМ= 70 % выходит за
пределы зоны нечувствительности Db и на выходе усилителя появляется сиг-
нал Uao= 100%, что эквивалентно подаче напряжения на электродвигатель ИМ;
- электродвигатель начнет вращаться с постоянной частотой Fsm и через
редуктор уменьшать положение ИМ М;
- уменьшение М приведет к соответствующему уменьшению сигнала Мap на выходе
датчика ДП;
- сигнал еМ отклонения положения ИМ от заданного начнет уменьшаться;
- в результате сигнал Uf=еМ на выходе КУП (на входе усилителя) будет
уменьшаться;
- в момент времени t1 сигнал на входе усилителя входит в зону нечувствитель-
ности на глубину зоны возврата, то есть будет выполнено условие
еМ = Мsp – Мap < Db-Dr;
- в соответствии с характеристикой усилителя данного регулятора (рис. 1.5.2) сиг-
нал на выходе усилителя Uao= 0, что эквивалентно прекращению питания элек-
тродвигателя ИМ;
- частота вращения обесточенного ЭД уменьшается и перемещение ИМ прекра-
щается, когда М= 72%;
- при новом установившемся положении входной сигнал усилителя
|Uf|=| 72-70 |= 2% остается внутри зоны нечувствительности Db=2 %;
- в конечном результате ИМ занимает новое заданное положение с погрешно-
стью 2%.
Графики работы контура позиционирования при скачкообразном уменьшении и увеличении сигнала заданного положения ИМ Мsp приведены на рис. 1.6.1

Рис. 1.6.1 График работы контура позиционирования от 200 до 220 секунд.
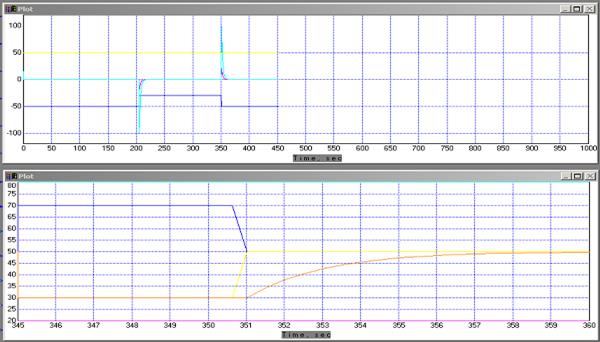
Рис. 1.6.2 График работы контура позиционирования от 345 до 360 секунд.
1.7. Принцип действия системы автоматического регулирования
температуры циркуляционного масла дизеля
Данная система регулирования может работать по двум принципам регулирования:
- по отклонению,
- по нагрузке и отклонению (комбинированно).
Поэтому был проведен эксперимент по получению переходных процессов в САР при скачкообразном увеличении и уменьшении нагрузки ОР, то есть расхода воды через охладитель.
Переходные процессы в САР при изменении нагрузки приведены:
- рис. 1.7.1 – система работает по принципу отклонения,
- рис. 1.7.2 – система работает по комбинированному принципу.
Действие САР, работающей по принципу отклонения, при изменении нагрузки ОР (см. рис. 1.7.1):
– в начальном состоянии системы регулирования значения температуры масла
на входе дизеля Tdi (регулируемой величины) постоянно и равно за
данному значению Тdi= Tosp;
– увеличение мощности дизеля Pds (нагрузки ОР) вызовет
увеличение температуры Tdi;
– увеличится сигнал Тoos на выходе датчика температуры масла ДРВ;
– при неизменном сигнале на выходе задатчика температуры Тosp возрастет сиг-
нал ошибки регулирования eX = Tosp – Тoos;
– после преобразования в КУО сигнала ошибки eX по заложенному в
КУО ПИД закону регулирования возрастет сигнал на выходе КУО Мsc (сигнал
заданного положения ИМ, формируемый каналом регулирования по от-
клонению);
– соответственно увеличится сигнал Мsp заданного положения ИМ на выходе
сумматора С;
– контур позиционирования будет увеличивать положение ИМ М, при этом ИМ
будет перемещаться ступенчато с постоянной скоростью;
– трехходовая поворотная заслонка (регулирующий орган) начнет увеличивать расход воды
(регулирующее воздействие) на охладитель;
– регулируемая величина Х возрастет и ошибка регулирования еX уменьшится;
– если система регулирования устойчива, то с течением времени ИМ займет по-
ложение, при котором значение расхода воды будет соответствовать новой на-
грузке ОР Pds и температура масла Тdi снова станет постоянной и равной ее
заданному значению Тosp;
– для уменьшения расхода воды действие САР температуры масла можно
описать в аналогичной последовательности.
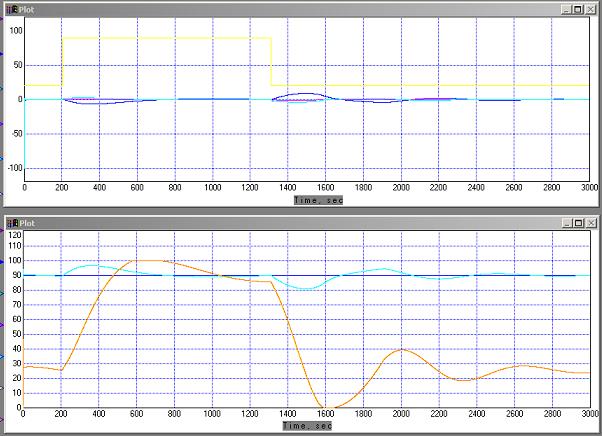
Рис. 1.7.1 Переходные процессы в САР, работающей по принципу отклонения, при изменении нагрузки ОР
Действие комбинированной САР (см. рис. 1.7.2) рассматривается для такого же изменения нагрузки объекта регулирования:-
- в начальном состоянии системы регулирования значение температуры масла Tdi постоянно и равно заданному значению Tdi = Тosp;
- увеличение мощности дизеля Pds вызовет увеличение сигнала Lt на выходе датчика нагрузки ДН;
- сигнал на выходе корректирующего устройства по нагрузке Мsl также увеличится;
- сигнал заданного положения ИМ Мsp возрастет соответственно,
- контур позиционирования будет увеличивать положение ИМ М;
- регулирующий орган начнет увеличивать регулирующее воздействие
на ОР Gwsc;
- параметры КУН в данном случае подобраны таким образом, что регулируемая величина начнет уменьшаться, но ошибка регулирования будет существенно меньше чем в предыдущем случае;
– канал регулирования по отклонению начинает работать аналогично
предыдущему случаю и устраняет отклонение регулируемой величины;
– для уменьшения мощности действие САР температуры масла можно
описать в аналогичной последовательности.
Графики переходных процессов 1.7.1 и 1.7.2 показывают, что использование комбинированного принципа регулирования в данной САР существенно уменьшило изменение регулируемой величины

Рис 1.7.2 Переходные процессы при изменении нагрузки ОР в САР температуры масла, работающей по комбинированному принципу.
Действие САР при изменении заданного значения температуры масла (см. рис. 1.7.3):
– в начальном состоянии системы регулирования значение температуры масла на входе дизеля Тdi (регулируемой величины) постоянно и равно за
данному значению Тdi= Тosp;
– увеличение заданного значения температуры Тosp и неизменном сигнале на
выходе датчика температуры Тoos появится сигнал ошибки регулирования
eX = Тosp – Тoos;
– дальнейшее действие САР протекает аналогично действию системы,
работающей по принципу отклонения, рассмотренному выше,
– система, работающая по комбинированному принципу, также действует анало-
гично.

Рис 1.7.3 Переходные процессы при изменении задания ОР в САР
температуры масла.
Дата добавления: 2015-09-05; просмотров: 104 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Описание регулятора | | | НАСТРОЙКА СЛЕДЯЩЕЙ СИСТЕМЫ |