|
Читайте также: |
Характеристическое уравнение системы (5.18)
 = λ2 + 2 hд λ + ωд2 = 0. (5.21)
= λ2 + 2 hд λ + ωд2 = 0. (5.21)
Условиями асимптотической устойчивости опорного движения (горизонтального полета с постоянной скоростью) является: 2hд>0 и ωд2>0. Первое условие (см. (5.20)) зависит от знака величин  = (
= ( ); (
); (  -
-  ) и
) и  . При этом , определяются при постоянном значении αбал горизонтального полета, а CpM – для постоянного режима работы двигателя (положения рычага управления двигателем (РУД)). Второе условие ωд2>0 при <0 выполняется при σV<0. Корни уравнения (5.21): λ1,2 = -hд ±
. При этом , определяются при постоянном значении αбал горизонтального полета, а CpM – для постоянного режима работы двигателя (положения рычага управления двигателем (РУД)). Второе условие ωд2>0 при <0 выполняется при σV<0. Корни уравнения (5.21): λ1,2 = -hд ±  .
.
Если ωд2> hд2 и ωд2>0, то корни будут комплексными сопряженными λ1,2 = -hд ± i  , а собственное длиннопериодическое движение называют колебательным или фугоидным и решения (5.18) равны
, а собственное длиннопериодическое движение называют колебательным или фугоидным и решения (5.18) равны
 ;
;
 ,
,
где hд – коэффициент демпфирования;  -круговая частота собственных колебаний; ωд – опорная частота или частота недемпфированных колебаний; φV, φθ – фазовые углы сдвига.
-круговая частота собственных колебаний; ωд – опорная частота или частота недемпфированных колебаний; φV, φθ – фазовые углы сдвига.
При  корни характеристического уравнения будут действительными, а собственное движение – апериодическим. Решение при этом будет
корни характеристического уравнения будут действительными, а собственное движение – апериодическим. Решение при этом будет
 ;
;
 ,
,
а при  ,
,  ;
;  ;
;  .
.
Постоянные AV, Aθ, A1V, A2V, A1θ, A2θ – определяются из начальных условий при t = t0.
Если σV>0, ωд2<0 один из корней λ1 или λ2 положительный и опорное движение апериодически неустойчивое. Если hд<0, a ωд2>0 возможны два вида неустойчивости: при hд2>ωд2 – будут два действительных положительных корня и неустойчивость будет апериодической, а при ωд2>hд2 – колебательная (фугоидная) неустойчивость.
5.3 Реакция ВС в продольном движении на отклонение органов управления
При изучении переходных процессов удобно пользоваться передаточными функциями, которые чаще всего рассматривают раздельно для короткопериодического и длиннопериодического возмущенных движений.
5.3.1 Передаточные функции ВС в короткопериодическом возмущенном движении
Уравнения движения от рассмотренных ранее в разделе 5.2.1 отличаются наличием управляющих воздействий (см.(5.1), (5.2), (4.5))
 ;
;
 ; (5.22)
; (5.22)
 ,
,
где Δ 
 =Δθ + Δα, Δθ = Δ – Δα,
=Δθ + Δα, Δθ = Δ – Δα,  .
.
(Иногда обозначается ωz вместо Δωz, т.к. в опорном режиме полета  = 0);
= 0);
 ;
;  ;
;  ;
;  .
.
Представим систему уравнений (5.22) в операторной форме с помощью таблицы 2 (раздел 4.1.2) при нулевых начальных условиях (индекс «Δ» опускаем)
 ;
;
 ; (5.23)
; (5.23)
 .
.
Решая эту систему уравнений, найдем передаточные функции (с точностью до  )
)
 ;
;
 (5.24)
(5.24)
 .
.
Обычно передаточные функции приводят к каноническому виду, в которых параметры канонической формы должны быть положительными. Передаточные коэффициенты
 ;
;  ;
;  ;
;
постоянные времени:  ;
;  ;
; 
Относительный коэффициент демпфирования  ;
; 
В канонической форме
 ;
;
 ; (5.25)
; (5.25)
 .
.
Знаки (±) свободного члена в знаменателе принимаются соответственно для ВС с про-
дольной статической устойчивостью по перегрузке (+) и неустойчивостью по перегрузке (-).
Аналогично вводятся передаточные функции  и другие.
и другие.
Приведем здесь перечень некоторых из решаемых задач динамики полета с помощью передаточных функций.
I. Используя знаменатель передаточной функции можно исследовать динамическую устойчивость (по Ляпунову) по первому приближению, т.к. знаменатель по форме совпадает с характеристическим уравнением с той лишь разницей, что вместо «λ» стоит параметр «p». (сравним (5.13) и первое уравнение (5.24)).
II. Если в качестве входного воздействия принять  в (5.24), то изображение по Лапласу
в (5.24), то изображение по Лапласу  и Wα/δв(p) = p α(p) можно использовать для определения установившегося значения переходной функции y(t) на основе теоремы
и Wα/δв(p) = p α(p) можно использовать для определения установившегося значения переходной функции y(t) на основе теоремы
2) (4.21) (в общем случае X(p) =  , Wyx(p) =
, Wyx(p) =  = p Y(p)).
= p Y(p)).
 .
.
III. При построении систем автоматического управления (САУ) изучаются
передаточные функции «замкнутых» систем, являющихся функциями исходных W(p) и проблема сводится к выбору параметров САУ такими, чтобы характеристики устойчивости и управляемости ВС были оптимальными, удовлетворяющими нормативным документам (АП – 25 и др.).
IV. Для устойчивых систем от W(p) нетрудно перейти к частотным характеристикам, положив p = iω и исследовать показатели («запасы») устойчивости и управляемости по АФЧХ.
V. Некоторые из показателей статической управляемости можно вычислить непосредственно по WYX(p).
VI. С помощью перехода от изображений к оригиналам можно проводить исследования во временной области.
В заключении заметим, что обычно для ВС составляются перечни (таблицы, «библиотека») передаточных функций, которые широко используются при решении различных задач динамики полета.
Лекция 9. 5.3.2 Характеристики переходных процессов в короткопериодическом движении
Поведение ВС в короткопериодическом (быстром, вращательном) движении определяется потребной нормальной скоростной перегрузкой nya для угловой ориентации, точной стабилизации. Определим сначала передаточную функцию  . Перегрузка
. Перегрузка
 ;
;
( ;
;  ;
;  ),
),
или, в возмущенном движении,
 ;
;
и преобразование Лапласа
Δnya(p) =  Δα(p).
Δα(p).
Передаточная функция  = и поскольку величина nykα = nyaα =
= и поскольку величина nykα = nyaα =  , то можно воспользоваться обозначением, принятым в системе уравнений (5.22) nyaα =
, то можно воспользоваться обозначением, принятым в системе уравнений (5.22) nyaα =  , тогда =
, тогда =  .
.
Передаточная функция может быть представлена следующим образом

и с учетом предыдущих соотношений и (5.25)
 (5.26)
(5.26)
(перед единицей в знаменателе принимается «+» для устойчивых систем), где  = Kα и Kα с использованием (5.12)
= Kα и Kα с использованием (5.12)
 .
.
Определим теперь коэффициент Kny
 , (5.27)
, (5.27)
поскольку из условия балансировки  и уравнения (2.47) было выведено ранее
и уравнения (2.47) было выведено ранее
 и
и  .
.
Рассмотрим решение одной из задач, когда в качестве входного воздействия принято δв(t) = 1(t) и соответственно δв(p) = . Определим переходную функцию, описывающую переходный процесс по времени при ступенчатом отклонении рулей в возмущенном движении. Переходя от изображения Δnya(p) = Wny/δв Δδв(p) к оригиналу, получим ( ).
).
 (5.28)
(5.28)
или
 , (5.29)
, (5.29)
где Δnyaуст проще вычислить, как предел на основе теоремы 2 (формула 4.21).
 .
.
Здесь Т – постоянная времени;  - относительный коэффициент демпфирования;
- относительный коэффициент демпфирования;
φ = arcsin  - сдвиг собственных колебаний по фазе;
- сдвиг собственных колебаний по фазе;  к =
к =  .
.
На основании (5.28), (5.29) можно определить динамические показатели устойчивости и управляемости ВС, по которым оценивают качество переходного процесса
период собственных колебаний ВС
 (5.30)
(5.30)
частоту собственных колебаний
 (5.31)
(5.31)
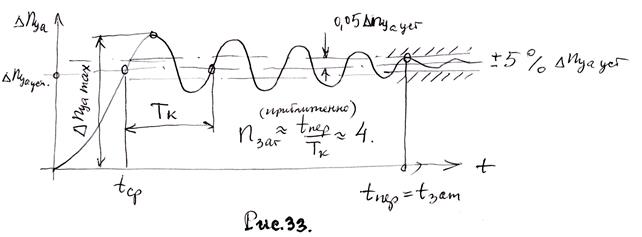
время переходного процесса, например, когда Δnya(t) входит в 5% трубку «относительно установившегося состояния» Δnyaуст, т.е. по (5.29).
 или
или  ,
,
откуда приближенно
 (5.32)
(5.32)
(tпер – иногда называют временем затухания).
Число колебаний до практически полного затухания
 . (5.33)
. (5.33)
Относительный заброс перегрузки при достижении своего первого экспериментального значения
 (5.34)
(5.34)
соответствует моменту времени t1 =  ;
;
время срабатывания – время первого выхода регулируемого параметра движения на его установившееся значение (в частности, Δnyaуст) или, при  , на значение равное 0,95 от установившегося значения в случае апериодического переходного процесса
, на значение равное 0,95 от установившегося значения в случае апериодического переходного процесса
 (5.35)
(5.35)
Иногда рассматривают изменение амплитуды колебаний за один период, время уменьшения амплитуды вдвое (t2) и т.п….
Основные характеристики колебательного переходного процесса (переходной функции) представлены на рис.33.
 Относительный заброс перегрузки (иногда называют величиной перерегулирования), как видно из (5.34) зависит от . Аналогично от зависит tпер = tзат. Приближенные зависимости представлены на рис.34.
Относительный заброс перегрузки (иногда называют величиной перерегулирования), как видно из (5.34) зависит от . Аналогично от зависит tпер = tзат. Приближенные зависимости представлены на рис.34.
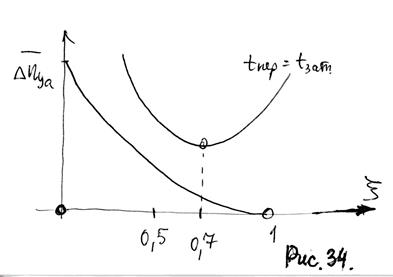
Из рисунка видно, что при  (
(  >
>  ) переходный процесс становится апериодическим и корни уравнения p2 + 2hk p + = 0 действительные. Тогда (pi
) переходный процесс становится апериодическим и корни уравнения p2 + 2hk p + = 0 действительные. Тогда (pi  )
)
 . (5.36)
. (5.36)
5.3.3 Передаточные функции возмущенного траекторного движения ВС в вертикальной плоскости (включая длиннопериодическое). Уравнения возмущенного движения ВС с учетом (5.2) и (5.17) рассматриваются для  ,
,  ,
,  и
и  . В этих уравнениях производится учет влияния ΔH на ΔV и Δθ, и в качестве управляющих воздействий вместо Δcp и Δδв приня- ты Δnдв =
. В этих уравнениях производится учет влияния ΔH на ΔV и Δθ, и в качестве управляющих воздействий вместо Δcp и Δδв приня- ты Δnдв =  и Δ . В традиционных уравнениях
и Δ . В традиционных уравнениях  коэффициенты
коэффициенты  следу- ющие:
следу- ющие: 




 ;
;  ;
;  ;
;  ;
; 
 . После преобразования Лапласа при нулевых начальных условиях нетрудно получить передаточные функции траекторного движения ЦМ ВС в канале тангажа:
. После преобразования Лапласа при нулевых начальных условиях нетрудно получить передаточные функции траекторного движения ЦМ ВС в канале тангажа:
 ; (5.37)
; (5.37)
где:  ;
;  ;
;  ;
;
 ; (5.38)
; (5.38)
 , (5.39)
, (5.39)
где  ;
;
 . (5.40)
. (5.40)
Передаточные функции в канале двигателя
 (5.41)
(5.41)
 (5.42)
(5.42)
 (5.43)
(5.43)
В траекторном движении принимается, что ВС сбалансировано и приближенно
 Кроме того,
Кроме того, 
5.3.4 Схемы основных передаточных функций. Канал руля высоты (δв; φ)

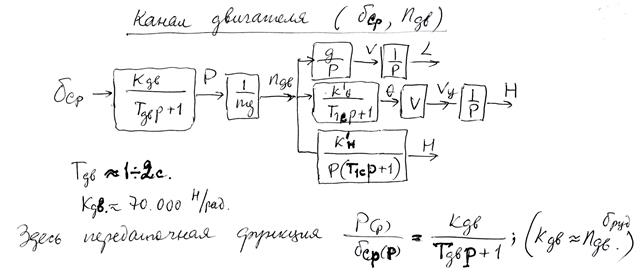 приближенно описывает динамику запаздывания установления тяги двигателя. Возможны и другие более точные математические модели, описывающие работу двигателя.
приближенно описывает динамику запаздывания установления тяги двигателя. Возможны и другие более точные математические модели, описывающие работу двигателя.
6. Динамика бокового возмущенного движения ВС
Будем полагать, что управление продольным движением определено и фиксировано, а начальное отклонение параметров продольного движения и возмущающие действия, влияющие на продольное движение, отсутствуют. Ввиду того, что боковое движение сопровождается вращением относительно двух осей OX и OY, оно в известном смысле сложнее, чем продольное относительно оси OZ. При достаточно больших возмущениях боковое движение вызывает существенное изменение параметров продольного и изолированное боковое возмущенное движение изучать некорректно. Таким образом, в отличие от продольного изолированное боковое движение может рассматриваться только при малых возмущениях. В боковом движении действуют гироскопические, инерционные моменты, а также силы и моменты, обусловленные аэродинамическим и кинематическим воздействием. Чтобы упростить исследования бокового возмущенного движения примем за опорный (невозмущенный) -прямолинейный установившийся (V ْ = const), горизонтальный (H ْ =const, α ْ =αбал =const, θ ْ = 0, αбал ْ =  ) полет без крена и скольжения (γа ْ =β ْ =0).
) полет без крена и скольжения (γа ْ =β ْ =0).
6.1 Уравнения бокового возмущенного движения
Уравнения бокового возмущенного движения относительно произвольного опорного (невозмущенного) режима движения рассмотрены ранее и представлены в виде системы (4.6). Если в качестве опорного принять режим, указанный выше, то система уравнений упрощается и с учетом малости углов γ, β(γ, β≤20 ْ ) и кинетических соотношений, получим
 ;
;
 ;
;
 ;
;
 ; (6.1)
; (6.1)
 ;
;
 .
.
Здесь приняты допущения и обозначения: 
 ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;
 , т.к.
, т.к.  ,
,  , то
, то 
 .
.
Вводя стандартные матричные обозначения для системы (6.1), имеем
 .
.
После преобразования Лапласа при нулевых начальных условиях  , которое приводится к виду
, которое приводится к виду
 . (6.2)
. (6.2)
6.2 Устойчивость в боковом возмущенном движении.
В уравнении (6.2) (pE - A), совпадающее по форме с (λE - A) и может быть использовано для составления характеристического уравнения
 ,
,
после раскрытия которого, получаем
 , (6.3)
, (6.3)
где:  ;
;
 ;
; 
 .
.
Уравнение (6.3) приводится к виду
 (6.4)
(6.4)
Здесь  . Приближенное значение большого корня
. Приближенное значение большого корня  можно получить, пренебрегая в уравнении (6.3) слагаемыми со степенями p ниже третьей. Получим
можно получить, пренебрегая в уравнении (6.3) слагаемыми со степенями p ниже третьей. Получим  или
или
Дата добавления: 2015-08-27; просмотров: 98 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Динамика продольного возмущенного движения ВС 1 страница | | | Динамика продольного возмущенного движения ВС 3 страница |