Читайте также:
|
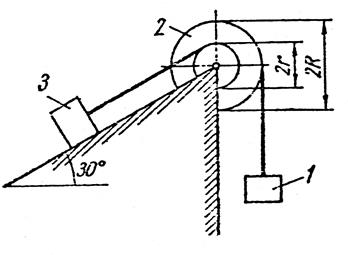
Задача 1
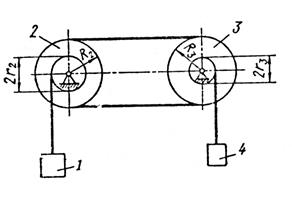
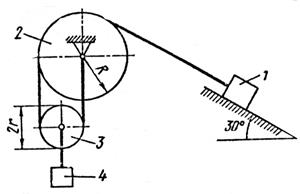
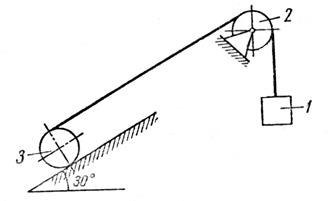
Для заданной механической системы определить ускорение всех грузов, натяжение нитей, к которым они прикреплены, а также скорости и пройденный телами путь за время 1 секунда. Массами нитей пренебречь. Трение качения и силы сопротивления в подшипниках не учитываются. Система начинает двигаться из состояния покоя. Блоки и катки, для которых радиусы инерции не указаны, считать однородными цилиндрами.
Варианты механических систем и исходные данные для различных вариантов расчета приведены ниже в таблице. Радиусы инерции даны относительно центральных осей, перпендикулярных плоскости чертежа. Коэффициенты трения принимать одинаковые как при скольжении тела по плоскости, так и при торможении колодкой (вар.9-12).
| Вариант 1 | G1 | G2 | G3 | R | r2x |

| G | G | 3G | 2r | r 
|
| 3G | G | 3G | 2r | r
| |
| G | 1,5G | 2G | 1,5r | 1,5r | |
| 1,5G | G | 2G | 1,5r | r
| |
| 4G | G | 2G | 2r | 1,2r |
| Вариант 2 | G1 | G2 | G3 | R | r2x |

| G | G | G | 2r | r
|
| 2G | G | G | 1,5r | 1,2r | |
| 8G | G | 5G | 2r | 1,5r | |
| 3G | G | 2G | 1,2r | 1,4r | |
| 4G | G | 2G | 2r | r
|
| Вариант 3 | G1 | G2 | G3 | R | r2x | f |

| 3G | G | G | 2r | r
| 0,1 |
| 2G | 2G | G | 3r | 1,2r | 0,1 | |
| 4G | 2G | 2G | 2r | 1,5r | 0,2 | |
| 5G | 2G | G | 2r | 1,4r | 0,15 | |
| 4G | G | G | 3r | r
| 0,2 |
| Вариант 4 | G1 | G2 | G3 | f |

| G | G | 2G | 0,2 |
| 4G | G | G | 0,1 | |
| 5G | 2G | 2G | 0.1 | |
| 8G | G | G | 0,2 | |
| 3G | G | 2G | 0,1 | |
| r2 = r3 |
| Вариант 5 | G1 | G2 | G3 | G4 | R | r2x |

| 2G | G | G | G | 3r | 2r |
| 8G | G | 2G | 2G | 2r | 1,5r | |
| 10G | G | G | 3G | 3r | 1,2r | |
| 6G | G | 2G | G/2 | 2r | 2r | |
| 3G | G | G/2 | G/2 | 1,5r | 3r |
| Вариант 6 | G1 | G2 | G3 | R | r2x | f |

| 2G | G | G | 3r | 2r | 0,2 |
| G | G | G | 2r | 1,5r | 0,1 | |
| 4G | G | 1,5G | 3r | 1,2r | 0,2 | |
| 8G | G | 2G | 4r | 2r | 0,3 | |
| 6G | G | G | 2r | 3r | 0,1 |
| Вариант 7 | G1 | G2 | G3 | R | r2x | f |
| 2G | G | 2G | 3r | 2r | 0,2 |
| 2G | 2G | G | 4r | 3r | 0,1 | |
| 4G | G | 2G | 2r | 1,5r | 0,2 | |
| 8G | 4G | 3G | 1,5r | r
| 0,3 | |
| 6G | G | G | 3r | r
| 0,1 |
| Вариант 8 | G1 | G2 | G3 | R | r2x | f |

| 2G | G | 2G | 3r | 2r | 0,2 |
| G | G | 3G | 3r | 2r | 0,1 | |
| G | 2G | 2G | 4r | 3r | 0,2 | |
| 2G | G | 3G | 5r | 4r | 0,3 | |
| G | 2G | 5G | 2r | 3r | 0,1 |
| Вариант 9 | G1 | G2 | G3 | R | r2x | f | P |

| 2G | G | 2G | 3r | 2r | 0,2 | G/5 |
| 4G | 2G | 3G | 4r | r/2 | 0,1 | 2G | |
| 3G | G | 2G | 3r | r | 0,2 | G | |
| 5G | 2G | 3G | 2r | 2r | 0,1 | G/2 | |
| 3G | 2G | G | 5r | r/2 | 0,3 | G/2 |
| Вариант 10 | G1 | G2 | G3 | R | r2x | f | P |

| 2G | 2G | G | 4r | 2r | 0,4 | G/3 |
| 3G | G | G | 3r | 1,5r | 0,1 | G | |
| 4G | G | G | 5r | 3r | 0,2 | 2G | |
| 5G | G/2 | G | 2r | 2r | 0,3 | G | |
| 2G | G/2 | 2G | 3r | 1,5r | 0,2 | G/2 |
| Вариант 11 | G1 | G2 | G3 | G4 | R | r2x | f |

| 2G | G | 2G | G/5 | 3r | 2r | 0,2 |
| 3G | 2G | G | G/5 | 4r | r
| 0,1 | |
| 3G | G | 2G | G/3 | 3r | r
| 0,3 | |
| 3G | 2G | 2G | G | 2r | 2r | 0,2 | |
| 4G | G | G | G/2 | 5r | r
| 0,1 |
| Вариант 12 | G1 | G2 | G3 | G4 | R | r2x | f |

| 2G | G | 2G | G/5 | 3r | 2r | 0,2 |
| 3G | 2G | 2G | G/3 | 4r | r
| 0,2 | |
| 4G | G | 4G | G/2 | 5r | 1,5r | 0,1 | |
| 5G | 2G | 4G | G | 2r | 1,2r | 0,3 | |
| 2G | 4G | G | G/2 | 3r | r
| 0,2 |
| Вариант 13 | G1 | G2 | G3 | G4 | r2x | r3x |
| 4G | 2G | G | 4G | r2
| 2r3 |
| 3G | G | 2G | 3G | r | r2
| |
| 5G | 2G | 3G | 5G | r2
| 2r | |
| G | 4G | G | G | r | r2
| |
| 8G | G | 2G | 8G | r2
| 2r | |
| r2=2r3 R2=R3 |
| Вариант 14 | G2 | G3 | G4 | r2x | r3x | P |

| 2G | G | 4G | r2
| 2r3 | 8G |
| G | 2G | G/2 | 1,2r2 | 2r3 | G | |
| G | G | 2G | 1,5r2 | 1,5r3 | 4G | |
| G | G | 3G | 2r2 | r3
| 6G | |
| 2G | G | G/2 | 2r2 | 1,4r3 | 5G | |
| r2=2r3 R3=1,5R2 |
| Вариант 15 | G1 | G2 | G3 | G4 | r2x | r3x |

| 4G | G | 2G | 4G | r2
| 2r3 |
| 3G | G | G | 3G | 2r2 | r3
| |
| 5G | G | 2G | 5G | 1,2r2 | 2r3 | |
| G/2 | G | G | G/2 | 1,5r2 | r3
| |
| G | G | G | G | 2r2 | r3
| |
| r2=2r3 R3=1,5R2 |
| Вариант 16 | G2 | G3 | G4 | r2x | r3x | P |

| G | 2G | 4G | r2
| 2r3 | 4G |
| G | G | 8G | r2
| r3 | 8G | |
| G | 2G | 5G | r2
| 1,2r3 | 5G | |
| G | G | 6G | r2
| 1,4r3 | 6G | |
| G | G | 2G | r2
| 1,5r3 | 2G | |
| r2=2r3 R3=1,5R2 |
| Вариант 17 | G1 | G2 | G3 | r2x | R | f |

| 2G | G | G | r2
| 2r | 0,1 |
| 5G | 2G | G | 2r2 | 1,5r | 0,2 | |
| G | G | G/2 | r2
| 3r | 0,4 | |
| G | 2G | G/4 | 2r2 | 4r | 0,3 | |
| 3G | 2G | 2G | r2
| 5r | 0,2 |
| Вариант 18 | G1 | G2 | G3 | G4 | R | f |
| 3G | G/5 | G/10 | G/2 | 2r | 0,4 |
| 4G | G | G | G | 3r | 0,1 | |
| 5G | 2G | G/2 | G/2 | 5r | 0,3 | |
| 8G | G | G/5 | G/3 | 2r | 0,2 | |
| 6G | G/2 | G | G | 4r | 0,3 |
| Вариант 19 | G1 | G2 | G3 | G4 | R | r2x | r3x |

| 4G | G/3 | G/5 | 3G | 3r | 2r2 | 1,2r3 |
| 2G | G | G | G | 4r | 1,2r2 | 2r3 | |
| 3G | G/5 | G/5 | 2G | 5r | 1,5r2 | 1,6r3 | |
| 5G | G/4 | G/4 | 4G | 2r | 2r2 | 3r3 | |
| 4G | G/3 | G | 2G | 5r | 1,3r2 | 2,2r3 | |
| f=0,1 r3=1,2r R3=1,2r3 |
| Вариант 20 | G1 | G2 | G3 | G4 | R | r2x | r3x |

| 4G | G/5 | 0,1G | 3G | 2r | 1,6r2 | r3
|
| 5G | G/2 | G/2 | 3G | 4r | 2r2 | 2r3 | |
| 8G | G/4 | G | 2G | 5r | 3r2 | 1,2r3 | |
| 6G | G/2 | G/5 | 3G | 2r | 1,2r2 | r3
| |
| 7G | G/3 | G | 4G | 3r | 1,3r2 | 2r3 | |
| f=0,2 r3=1,5r R2=1,2r2 |
| Вариант 21 | G1 | G2 | G3 | R | r3x | P |

| 5G | G/10 | G/5 | 3r | r3
| G |
| 3G | G | G | 4r | 1,5r3 | 2G | |
| 4G | G | G/2 | 1,5r | 2r3 | 3G | |
| 2G | 2G | G/5 | 3r | r3
| G | |
| 4G | G | G/3 | 4r | 2,2r3 | 2G |
| Вариант 22 | G1 | G2 | G3 | R | r3x | P |

| G | G/5 | 0,3G | 2r | r3
| G |
| 2G | G | G | 3r | 1,5r3 | 2G | |
| G | 3G | G/2 | 5r | 1,2r3 | 3G | |
| G | G | G/5 | 4r | r3
| G | |
| G | 2G | G | 2r | 2,5r3 | G |
| Вариант 23 | G1 | G2 | G3 | R | r2x | P |

| G | G/5 | G/10 | 1,5r | 1,2r2 | 2G |
| G | 1,5G | G | 2r | 3r2 | 3G | |
| 3G | G | G | 3r | 1,6r2 | 5G | |
| G | G | G/2 | 4r | 2r2 | G | |
| G/2 | G | G/5 | 2r | 1,5r2 | 2G | |
| R3=1,2r |
| Вариант 24 | G1 | G2 | G3 | G4 |

| 2G | G | G | 8G |
| 3G | G | G | 15G | |
| 4G | 2G | G | 10G | |
| G | 2G | G | 5G | |
| 2G | 3G | G | 12G | |
| Массы всех четырех колес одинаковы |
| Вариант 25 | G1 | G2 | G3 | G4 |

| 6G | 2G | 2G | G |
| 8G | 3G | G | 2G | |
| 10G | 4G | 3G | 3G | |
| 5G | 2G | G | 2G | |
| 6G | 3G | 2G | G | |
| r3=r4 |
| Вариант 26 | G1 | G2 | G3 | |
| 6G | G | 2G | r3=r2 |
| 8G | 2G | 5G | r3=2r2 | |
| 5G | 3G | 3G | 2r3=r2 | |
| 4G | G | 2G | r3=1,5r2 | |
| 10G | 2G | 5G | 2r3=r2 |
| Вариант 27 | G1 | G2 | G3 | G4 | R |

| G | G | G | 4G | 2r |
| 2G | 3G | G | 8G | 3r | |
| G | 3G | 2G | 5G | 4r | |
| 2G | 2G | 2G | 6G | 2r | |
| G | 4G | 3G | 10G | 5r | |
| r2x=r3x= r
|
| Вариант 28 | G1 | G2 | G3 | R | r2x | f |

| 3G | G | G | 2r | r2
| 0,1 |
| 2G | G | G | 3r | 2r2 | 0,2 | |
| G | 2G | G/2 | 4r | r2
| 0,3 | |
| 2G | 3G | G | 2r | 1,5r2 | 0,1 | |
| 3G | G | G/3 | 5r | r2
| 0,2 |
| Вариант 29 | G1 | G2 | G3 | G4 | R | r3x |

| 6G | 3G | G | G | 2r | r
|
| 8G | 4G | G | G | 3r | 1,2r | |
| 5G | 3G | 2G | 2G | 4r | 2r | |
| G | G/2 | 2G | G | 2r | 1,5r | |
| 4G | 2G | G | 2G | 5r | 2r | |
| r4x=r3x |
Дата добавления: 2015-08-20; просмотров: 119 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Глава первая, в которой Софи беседует со шляпками | | | Дион Форчун - Жрица моря |