Читайте также:
|
Асинхронная машина (двигатель и генератор) — это машина, в которой ее подвижная часть вращается асинхронно, т.е. с частотой вращения, отличной от частоты вращения магнитного поля. Асинхронные машины применяются в основном в качестве двигателей.
Основное достоинство асинхронного двигателя — простота его конструкции и низкая стоимость. В машине отсутствуют какие-либо легко повреждающиеся или быстро изнашивающиеся электрические части.
Основной недостаток — сложное и неэкономичное регулирование режимов работы.
Трехфазная асинхронная машина состоит из неподвижного статора и вращающегося ротора.
Конструкция статора. Статор асинхронной машины представляет собой полый цилиндр, собранный из листов электротехнической стали, изолированных друг от друга слоем лака (рис. 8.1, а). В пазах на внутренней стороне статора размещаются обмотки трех фаз. Обмотка каждой фазы содержит одну или несколько катушечных групп, соединенных последовательно и расположенных вдоль окружности статора на равном расстоянии друг от друга.
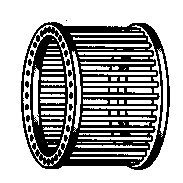
Конструкция ротора. Ротор асинхронной машины представляет собой цилиндрический сердечник (рис. 8.3, а), собранный из листов электротехнической стали, изолированных друг от друга лаком. Сердечник ротора насажен на вал, закрепленный в подшипниках. В пазах сердечника ротора располагаются витки обмотки ротора. Различают ротор с короткозамкнутой обмоткой и фазный ротор.

| 
| 
|
Ротор с короткозамкнутой обмоткой применяется в большинстве двигателей. Он имеет низкую стоимость и прост в обслуживании. Обмотка такого ротора выполняется в виде цилиндрической клетки (рис. 8.3, б) из медных или алюминиевых стержней, которые без изоляции укладывают в пазы сердечника ротора. Концы стержней замыкаются на торцах ротора кольцами из того же материала, что и стержни («беличье колесо»). Часто такая обмотка изготовляется путем заливки пазов сердечника ротора расплавленным алюминием.
Обмотка фазного ротора (рис. 8.3, в) выполняется изолированным проводом. В большинстве случаев она трехфазная, с тем же числом катушек, что и обмотка статора двигателя. Обмотки трех фаз ротора соединяются звездой и подключаются к трем контактным кольцам, укрепленным на валу машины, но изолированным от него. По кольцам скользят щетки, установленные в неподвижных щеткодержателях. Через кольца и щетки обмотка ротора присоединена к трехфазному реостату (рис. 8.4).
Трехфазная обмотка статора создает вращающееся магнитное пале. Скорость вращения поля зависит только от частоты тока и количества пар полюсов обмотки статора:

где n - скорость вращения поля (об/мин);
f1 - частота тока в обмотке статора;
p - число пар полюсов.
Вращающееся магнитное поле пересекает стержни «беличьего колеса» и наводит в них ЭДС. Поскольку стержни замкнуты кольцами, ЭДС вызывает в них ток. Взаимодействие вращающегося магнитного поля с током в стержнях создает вращающий электромагнитный момент. Если ротор разогнать до скорости вращающегося поля, то магнитные силовые линии не будут пересекать стержни и ЭДС при этом ненаводится.
В этом случае не будет создаваться вращающий электромагнитный момент. Иначе говоря, машина работает только тогда, когда

где n1 - скорость вращения поля (об/мин—синхронная скорость);
n2 -скорость вращения ротора (об/мин—асинхронная скорость).
Вообще асинхронная машина, как и все электрические машины, обратимая, т.е.:
если n1> n2 , машина работает в режиме двигателя;
если n1< n2 , машина работает в режиме генератора;
если n1= n2, создается искусственный режим идеального нерабочего (холостого) хода.
Если поле вращается в одну сторону, а ротор вращается посторонней силой в другую сторону, то машина работает в режиме электромагнитного тормоза.
Характеристикой асинхронности является величина скольжение S.

Обычно эта величина определяется в частях единицы или в процентах и колеблется в пределах S =0,02…0,05.
Вращающееся магнитное поле индуцирует ЭДС в статорной и роторной обмотках.
По уравнению трансформаторной ЭДС в обмотке статора

где к0— обмоточный коэффициент, учитывающий падение ЭДС вследствие распределенного исполнения обмотки (величина табличная, обычно колеблется в пределах 0,92...0,97).
В заторможенной (неподвижной) роторной обмотке (n2=0) ЭДС можно определить также из уравнения трансформаторной ЭДС

где Е2н - ЭДС неподвижной обмотки ротора;
 - частота тока в обмотке статора.
- частота тока в обмотке статора.
Если ротор вращается, то частота ЭДС, индуцируемая в обмотке ротора, зависит от его скорости по отношению к скорости вращения поля, т. е.

где n1- n2 - число оборотов ротора по отношению к числу оборотов поля.
Это выражение можно умножить и разделить на n1и получить

Из уравнения трансформаторной ЭДС

однако, с учетом того, что f2=Sf1,
В двух граничных случаях: при пуске двигателя S= 1 (п2 = 0), Е2 = Е2н;
если ротор догнал поле, S = 0 (n2= n1), Е2 = 0-На рис. 10.8 приведена зависимость ЭДС ротора от скорости вращения ротора. Максимальная ЭДС наводится в момент пуска двигателя.

|
| Рис. 10.8 |
Роторная обмотка имеет сопротивление R2 — активное; Х2 = ω2L2 - рассеяния. Поскольку ω2=Sω1, Х2 = ω1SL2.
Ток в роторной обмотке
 .
.
Обычно ток в роторной обмотке определяют из соотношения
Максимальный ток устанавливается при пуске двигателя, т. е. при S=1. При разгоне ротора ток уменьшается, а если S = 0, I2 = 0.
Максимальный ток протекает в обмотке ротора при пуске двигателя.
Потери мощности и КПД асинхронного двигателя
Мощность, которая потребляется двигателем

где т 1 - количество фаз обмотки статора.
Мощность на валу двигателя (полезная мощность)

где М2— момент на валу.
Уравнение энергетического баланса имеет вид
где ΣР — суммарные потери. КПД асинхронного двигателя.
КПД асинхронного двигателя

Обычно потери в электрических машинах изучают по энергетическим диаграммам.
На рис. 10.13 приведена энергетическая диаграмма асинхронного двигателя.

|
| Рисунок Энергетическая диаграмма асинхронного двигателя. |
Из энергетической диаграммы следует вывод о потерях мощности:
а)  - электрические потери в статоре;
- электрические потери в статоре;
б)  - магнитные потери в статоре;
- магнитные потери в статоре;
в)  - электрические потери в роторе;
- электрические потери в роторе;
г) РМ2 – магнитные потери в роторе. Эти потери пропорциональны частоте f2=Sf1. При промышленной частоте и S = 0,03...0,05 потерь почти нет, следовательно Рм2  0;
0;
д) РТ - потери от трения и на охлаждение машины.
Электромагнитная мощность определяется соотношениями
 ,
,

Механическая мощность

КПД двигателя
 ,
,
а ток, потребляемый двигателем,

Чем больший cos φ1 (коэффициент мощности), тем меньшим будет ток, потребляемый двигателем. У асинхронных двигателей обычно cos φ1 = 0,75...0,95. Зазоры между статором и ротором стремятся делать небольшими. Это уменьшает индуктивность и реактивную мощность, т. е. увеличивает cos φ1.
Общие потери в двигателе зависят от нагрузки, поэтому и КПД двигателя зависит от его нагрузки (рис. 10.14). Двигатели конструируют таким образом, что максимальный КПД обеспечивается при нагрузке, несколько меньшей, чем номинальная. Обычно КПД асинхронных двигателей довольно высокий и достигает 80...90%. В мощных двигателях КПД выше и доходит до 90...96%.

|
Электромагнитный момент.
Выражение для расчета электромагнитного момента, развиваемого асинхронным двигателем, можно получить, исходя из его электромагнитной мощности
 ,
,
откуда электромагнитный момент  , где
, где  - постоянная машины и зависит от конструктивных особенностей машины.
- постоянная машины и зависит от конструктивных особенностей машины.
Электромагнитный момент можно определить исходя из электрических потерь мощности в обмотках ротора
 ;
;
 ;
;
 ;
;
 ,
,
где m2 – число фаз обмотки ротора.
Приведенный ток ротора можно выразить через параметры схемы замещения асинхронного двигателя
 ,
,
откуда  .
.
Уравнение зависимости M(S) называют механической характеристикой. Анализ зависимости M(S):
1. функция М определена в области  ;
;
2. в режиме идеального холостого хода (S = 0) электромагнитный момент отсутствует;
3. кривая имеет два экстремума при критических скольжениях;
4. критические скольжения определяются

где знак «+» отвечает режиму двигателя, а знак «-» — режиму генератора;,
5. максимальные моменты определяются соответственно для двигателя и генератора как
 ;
;
6. можно пренебречь активным сопротивлением статора и получить приблизительные соотношения
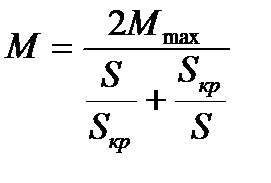 ;
;  .
.
Естественной механической характеристикой называется характеристика двигателя с короткозамкнутым ротором (сопротивление обмотки ротора практически равно нулю).
Искусственная характеристика — это характеристика двигателя с сопротивлением обмотки ротора R2 > 0 (фазный ротор).
При аналитических исследованиях асинхронных машин используется зависимость электромагнитного момента от скольжения. Как и все электрические машины, асинхронная машина обратима. В режиме 0<S<1 она работает как двигатель. При отрицательных значениях скольжения (скорость ротора больше скорости вращения поля) машина работает как генератор. Если внешняя сила вращает ротор против направления вращения поля (S > 1), то машина работает как электромагнитный тормоз. При этом электромагнитный момент будет препятствовать вращению ротора.
Можно рассматривать связь электромагнитного момента со скольжением только для режима двигателя (рис. 10.16). Такая кривая имеет явный максимум при критическом скольжении. Этот максимум делит кривую на области устойчивой и неустойчивой работы. Обычно номинальное значение скольжения SН = 0,02...0,05, критическое скольжение Sкр = 0,1...0,2.

|
Механическая характеристика - это зависимость скорости вращения ротора от электромагнитного момента, т. е. n2 =f (М). Эту зависимость можно получить, если строить зависимость M= f (S) в других координатах (рис. 10.17). Режим двигателя осуществляется, когда
0<n2<n1.
Механическая характеристика асинхронного двигателя приведена на рис. 10.18. При n2 = 0 происходит пуск двигателя, При S = 0 (ротор догнал поле) n2= n1 и М= 0.
В пределах 0 < S < Sкр скорость вращения незначительно зависит от момента сопротивления. Эта часть характеристики считается жесткой.
В пределах Sкр <S<1 механическая характеристика соответственно мягкая.

Обычно в асинхронных двигателях номинальный момент составляет MH  (0,4...0,6)Mmax.
(0,4...0,6)Mmax.
Максимальный момент не зависит от активного сопротивления ротора.
Рабочими характеристиками асинхронного двигателя называются зависимости от мощности Р2 или коэффициента загрузки  :
:
частоты вращения ротора п2 (или скольжения);
коэффициента полезного действия;
коэффициента мощности (cos φ);
тока статора I1;
момента на валу М2.
Рабочие характеристики определяют экспериментально или строят теоретически при постоянных напряжении на статоре (U1 = const) и частоте (f1 = const).
Рабочие характеристики строят для области устойчивой работы двигателя (от S = 0 до S > SH на 10...20%).
С целью уменьшения потерь мощности в роторе и для повышения КПД двигатели проектируют с небольшим номинальным скольжением. Поэтому зависимость  , которая называется скоростной характеристикой, является жесткой. Таким образом, частота вращения ротора при переходе от холостого хода к номинальной нагрузке уменьшается незначительно (на 2…6%).
, которая называется скоростной характеристикой, является жесткой. Таким образом, частота вращения ротора при переходе от холостого хода к номинальной нагрузке уменьшается незначительно (на 2…6%).
Зависимости КПД и коэффициента мощности носят такой же характер, что и для трансформаторов, т. е. максимум КПД отвечает нагрузке 70...85% от номинальной. Незначительный максимум имеет и кривая  .
.
Работа асинхронного двигателя при небольшой нагрузке энергетически невыгодна из-за малого значения коэффициента мощности. Максимальный коэффициент мощности для асинхронного двигателя:
малой и средней мощности (1... 100 кВт) — 0,7...0,9;
большой мощности (свыше 100 кВт) — 0,9...0,92.
Вращающий момент на валу входит в соотношение
 .
.
Поскольку скоростная характеристика является жесткой, зависимость  почти линейна. Нужно помнить, что момент на валу М2 меньше, чем электромагнитный момент, на величину механических и дополнительных потерь.
почти линейна. Нужно помнить, что момент на валу М2 меньше, чем электромагнитный момент, на величину механических и дополнительных потерь.
Ток статора I1 - это ток, который потребляет двигатель от сети. Зависимость  имеет почти линейный характер.
имеет почти линейный характер.
При этом можно получить семейство механических характеристик электродвигателя при разных добавочных сопротивлениях, из которых видно, что при постоянном моменте нагрузки на валу электродвигателя с увеличением активного сопротивления в цепи ротора рабочая точка смещается с одной механической характеристики на другую, соответствующую новому, возросшему сопротивлению цепи ротора. Происходит увеличение скольжения ротора, а следовательно, уменьшение частоты вращений ротора асинхронного двигателя.
При рассматриваемом способе возможно регулирование частоты вращения двигателя в пределах от номинального значения n2ном до его значения, равного нулю. Однако при этом возникают значительные потери мощности в дополнительном активном сопротивлении цепи ротора, пропорциональные квадрату тока ротора, что делает этот способ неэкономичным.
Регулирование частоты вращения асинхронных короткозамкнутых электродвигателей изменением скольжения может быть достигнуто за счет уменьшения напряжения на зажимах двигателя. При этом критический момент асинхронного двигателя уменьшается, жесткость механической характеристики также уменьшается, а скольжение ротора двигателя при том же моменте нагрузки возрастает. Происходит уменьшение частоты вращения электродвигателя. Регулирование асинхронного двигателя при этом способе возможно только в незначительном диапазон скольжений, который ограничивается критическим моментом.
Следует отметить, что при уменьшении напряжения происходит резкое снижение критического момента двигателя, пропорционального квадрату напряжения, а следовательно, резкое уменьшение перегрузочной способности двигателя по кратности критического момента, что ограничивает область применена этого способа.
Регулирование частоты вращения асинхронных короткозамкнутых двигателей, как указывалось, возможно путем изменения числа пар полюсов, что применимо для многоскоростных двигателей. Сущность этого заключается в том, что при постоянно частоте напряжения питающей сети частота вращения асинхронного двигателя зависит от числа пар полюсов обмотки статора. Таким образом, если на статоре асинхронного двигателя разместить две или несколько отдельных обмоток с разными числами пар полюсов, то при включении в сеть каждой обмоток в отдельности можно получить различные частоты вращения вращающегося магнитного поля и вращения ротора.
Для увеличения диапазона регулирования частоты вращения поля статора асинхронного двигателя снабжается двумя независимыми обмотками, каждая из которых может переключаться на число пар полюсов в отношении 1:2. В этом случае асинхронный двигатель будет иметь четыре ступени скорости. Кроме электродвигателей, рассчитанных на одну частоту вращения, отечественная промышленность выпускает двух-, трех- и четырехскоростные асинхронные короткозамкнутые электродвигатели с соответствующим числом пар полюсов.
Регулирование частоты вращения асинхронных двигателей путем переключения числа пар полюсов производится без потерь мощности. Однако многоскоростные электродвигатели гораздо сложнее по конструкции и дороже обычных односкоростных. При этом регулирование частоты вращения оказывается ступенчатым, неплавным.
Регулирование частоты вращения асинхронных электродвигателей может быть осуществлено и путем изменения частоты напряжения, подводимого к обмотке статора. При этом происходит изменение частоты вращения вращающегося магнитного поля и частоты вращения ротора электродвигателя.
Существенным недостатком частотного способа регулирования является необходимость применения специального оборудования, в частности преобразователей частоты, что значительно усложняет систему электропривода и увеличивает массу, габариты и стоимость установки. Однако с развитием полупроводниковой техники, появления тиристоров и других полупроводниковых приборов этот способ нашел широкое применение.
Дата добавления: 2015-08-17; просмотров: 93 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Тестовые задания к лабораторной работе №8 | | | Экспериментальная часть. |