|
Читайте также: |
Шаговый двигатель в рассмотренном примере имел угол поворота 90° на шаг. Статоры и роторы реальных шаговых двигателей представляют собой последовательности мини-полюсов. Мини-полюса уменьшают угол поворота на шаги улучшают разрешение шагового двигателя. Схема шагового двигателя на рис. 10.5 представляется более сложной, однако принцип его работы идентичен рис. 10.3 и 10.4.
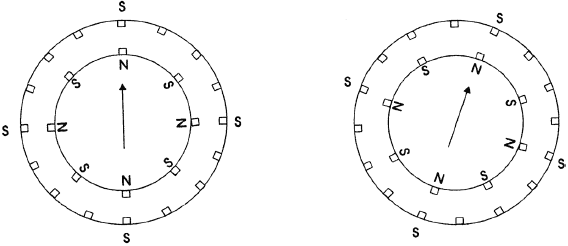
Рис. 10.5. Многополюсное управление
Ротор двигателя на рис. 10.5 поворачивается по часовой стрелке. В исходной позиции северный полюс постоянного магнита ротора притянут к южному полюсу электромагнита статора. Заметим, что таких пар магнитов, притянутых разноименными полюсами, несколько. Во втором положении цепочка электромагнитов выключается, и включается следующая по ходу часовой стрелки цепочка. Это приводит к повороту ротора по часовой стрелке на строго определенный угол. Это продолжается таким же образом и для следующих шагов. После восьми шагов цикл завершается и начинается повторение. Поворот на половинный шаг аналогичен описанному выше.
На рис. 10.6 показана схема однополярного шагового двигателя. Двигатель имеет шесть выводов, выходящих из корпуса. Как видно из рис. 10.6, обмотки соединены попарно последовательно и имеют выводы от средней точки. Если вы только что взяли в руки подобный шаговый двигатель и ничего не знаете о нем, то простейшим способом будет измерение электрического сопротивления между выводами. Составив таблицу соответствия между цветами проводов выводов и электрическими сопротивлениями между ними, вы быстро разберетесь, какие выводы соответствуют каким обмоткам. (В некоторых случаях шаговый двигатель имеет только пять выводов. В этом случае средние точки обмоток соединены между собой).
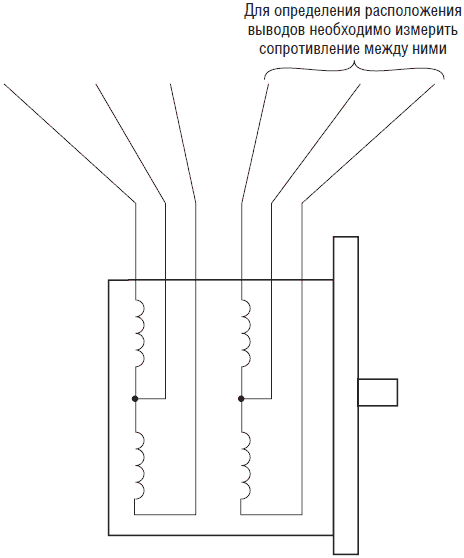
Рис. 10.6. Принципиальная схема шестиполюсного шагового двигателя
Двигатель, который мы будем использовать, имеет сопротивление 100 Ом между центральным выводом и концом обмотки, и соответственно, 220 Ом между концами обмоток. Понятно, что сопротивление между несвязанными между собой обмотками будет равно бесконечности (нет соединения). Снабженные этой информацией, мы легко сможем определить распайку выводов обмоток любого двигателя с шестью выводами. Шаговый двигатель, который мы будем использовать, имеет угол поворота 1,8° на шаг.
Дата добавления: 2015-08-17; просмотров: 73 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Половинный шаг | | | ИС UCN-5804 |