Читайте также:
|
Характеристика траекторной управляемости K=f( ) представлена на рисунке 10.1 по данным таблиц 10.1 и 10.2
) представлена на рисунке 10.1 по данным таблиц 10.1 и 10.2
На график наносится прямая K=f(), соответствующая нейтральной поворачиваемости. Прямая строится по формуле K=αp/(uр L).
Там же на график наносится прямая, ограничивающая допускаемые значения K=f() снизу (наименьшую чувствительность).
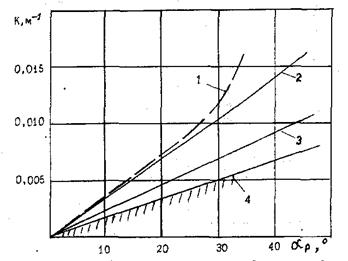
Рисунок 10.1 Характеристика статической траекторной управляемости груженого автомобиля:
1 – второе приближение; 2 – первое приближение;
3 – kпв =1; 4 – нижняя допустимая граница.
Из рассмотрения данных графических зависимостей можно отметить:
1. Автомобиль в груженом состоянии имеет избыточную поворачиваемость. так как обе зависимости (первого и второго приближения) проходят выше прямой нейтральной поворачиваемости.
2. Зависимости K=f(). построенные по результатам расчета в первом и втором приближениях, отличаются один от другого, в особенности, начиная с αp >20 град.
3. Зависимость K=f() в первом приближении носит линейный характер, что указывает на постоянство коэффициента поворачиваемости КПВ.
4. Зависимость K=f() во втором приближении является вогнутой, что указывает на повышение избыточности поворачиваемости автомобиля с увеличением .
5. Поскольку зависимость K=f() проходит выше нижней допускаемой границы, можно считать статическую траекторную управляемость груженого автомобиля удовлетворительной.

Рисунок 10.2. Чувствительность к управляющему воздействию груженого автомобиля:
1 – первое приближение; 2 – второе приближение;
3 – к пв=1
На рисунке 10.2 приведены зависимости ωа/  =f(αр), характеризующие чувствительность к управлению, рассмотрение которых позволяет отметить:
=f(αр), характеризующие чувствительность к управлению, рассмотрение которых позволяет отметить:
1. Автомобиль в груженом состоянии имеет переменную чувствительность к управлению со значительной тенденцией увеличения чувствительности при увеличении ;
2. Сравнение зависимостей подтверждает сделанные выше выводы 1, 4.
Характеристика статической траекторией управляемости для не груженого автомобиля, построенная по данным таблице 10.2, 10.3 приведена на рисунке 10.3. Анализ приведенных зависимостей позволяет сделать следующие выводы:
1. Исследуемый автомобиль в не груженом состоянии имеет недостаточную поворачиваемость, так как об кривые (1– го и 2– го приближений) находятся ниже прямей нейтральней певорачиваемости.
2. Зависимости K=f(). полученные в первом и втором приближениях, до αp =70 град, практически не отличаются друг от друга, однако зависимость, полученная в первом приближении. носит линейный характер, что указывает на постоянство коэффициента поворачиваемости, и во втором приближении является выпуклой, что соответствует возрастанию недостаточной поворачиваемости автомобиля с увеличением угла поворота рулевого колеса.
3. Зависимости K=f() в первом и втором приближении проходят выше нижней допускаемой границы, которая обусловливает минимальный предел чувствительности, что, позволяет считать статическую траекторную управляемость не груженого автомобиля удовлетворительной.
На рисунке 10.4 приведены зависимости чувствительности к управлению от угла поворота рулевого колеса. Анализ этих зависимостей позволяет сделать следующие выводы:
1. Расчетная зависимость в первом приближении носит линейный характер и не зависит от угла поворота рулевого колеса. во втором приближении кривая выпуклая, что подтверждает сделанный выше вывод об увеличении недостаточности поворачивавмости при увеличении αp и уменьшении чувствительности;
2. Автомобиль в не груженом состоянии имеет меньшую чувствительность, нежели автомобиль с нейтральной поворачиваемостью.

Рисунок 10.3 Характеристика статической траекторной управляемости негруженого автомобиля:
1 – k пв=1; 2 – первое приближение;
3 – второе приближение; 4 – нижняя допустимая граница.
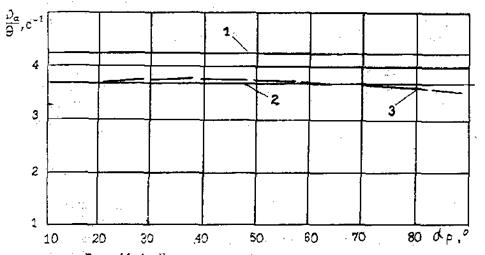
Рисунок 10.4 Чувствительность к управляющему воздействию не груженого автомобиля:
1 – k пв =1; 2 – первое приближение; 3 – второе приближение
Проведенные расчеты и анализ полученных результатов для автомобиля в груженом и не груженом состояниях позволяют отметить:
1. Свойства автомобиля при круговом повороте в значительной степени зависят от его загрузки. Так в груженом состоянии автомобиль имеет избыточную поворачиваемость, которая увеличивается с увеличением αp, и наоборот, в негруженом состоянии автомобиль меняет свойство поворачиваемости и приобретает недостаточную поворачиваемость, возрастающую при увеличении αр.
2. Чувствительность к управлению у груженого автомобиля всегда выше, чем у не груженого.
3. Чувствительность к управлению находится также в зависимости от степени загрузки автомобиля. В не груженом состоянии чувствительность несколько уменьшается с увеличением αp. В груженом состоянии – увеличивается.
4. Существует такое значение полной массы (степени загрузки), когда данный автомобиль обладает нейтральной поворачиваемостью.
Контрольные вопросы
1.Какие задачи позволяет решить расчет кругового поворота автомобиля?
2.Что входит в кинематические параметры кругового поворота автомобиля?
3.Написать формулу определения радиусов поворота автомобиля?
4.Написать формулу коэффициента сопротивления боковому уводу колеса.
5.От каких коэффициентов коррекции зависит коэффициент сопротивления боковому уводу колеса.
1 В данном случае красный автомобиль поворачивает из второго ряда перекрестка с круговым движением. … Я так понимаю, что вьезд на кольцо - это в любом случае поворот направо. Т.е. с какой полосы водитель не вьезжал бы, он обязан … Расчет размера утилизационного сбора.
2 Свойства автомобиля изменять кинематические параметры поворота под действием внешних боковых сил при фиксированной … Рассмотрим круговое движение автомобиля с постоянной скоростью. Возникающие при этом углы увода, имеют следующие зависимости
3 Поворот автомобиля является настоящим маневром, требующим концентрации внимания и понимания радиуса поворота на тот или иной угол. … Из формулы центробежной силы следует, что она прямо пропорциональна квадрату скорости и обратно пропорциональна радиусу
4 Эта характеристика определяется только на катящемся колесе и измеряется коэффициентом сопротивления боковому уводу, определяющимся интенсивностью нарастания боковой силы в зависимости от угла увода колеса.
5 Эта характеристика определяется только на катящемся колесе и измеряется коэффициентом сопротивления боковому уводу, определяющимся интенсивностью нарастания боковой силы в зависимости от угла увода колеса.
Дата добавления: 2015-07-10; просмотров: 185 | Нарушение авторских прав