Читайте также:
|
Достаточно полно и последовательно процессы регулирования довольно большого класса движений описывает теория, развитая Н.А. Бернштейном. Он предложил обобщенную схему замкнутого кольцевого координированного управления сформированного двигательного акта. Он убедительно показал, что управление сложным двигательным аппаратом человека и животных невозможно без постоянного притока в центральную нервную систему афферентных сигналов о состоянии кинематической цепи. Хотя принцип сенсорных коррекций рассматривался Н.А. Бернштейном в качестве ведущего в координации движений, однако он не менее важное значение придавал образу, функция которого состоит в осмысливании двигательной задачи и предвосхищении результата ее решения. Образ или представление результата рассматриваются Н.А. Бернштейном в качестве инварианта, который определяет программу реализации и корригирования действия.
В модели кольцевого управления Н.А. Бернштейна программа идентифицирована с задающим элементом, который является "командным постом всей кольцевой системы" [19, с. 237]. В нем Н.А. Бернштейн выделяет два уровня. Определяющим фактором макроуровня программы двигательного акта в целом является "образ или представление того результата действия (концевого или поэтапного), на который это действие нацеливается осмыслением возникшей двигательной задачи" [там же, с. 240]. Иначе говоря, на этом уровне намечается решение поставленной задачи и определяется та или иная программа, которая будет реализовываться задающим элементом. На микроуровне происходит перешифровка обобщенных образных представлений о результатах действия в детализированные команды по скорости, силе, направлению и т.д. каждого "предельно малого отрезка движения".
Механизмом, способным осуществлять коррекционные процессы, служит прибор сличения. В его функции входит сличение, оценка, восприятие расхождения между "текущей рецепцией и представленным в какой-то форме в центральной нервной системе внутренним руководящим элементом" [19, с. 243 ]. Сигнал о возникшем при сличении рассогласовании является основанием для формирования коррекционных импульсов. В приборе сличения происходит восприятие и оценка скорости движения благодаря сопоставлению мгновенного положения элемента в текущий момент со "свежим следом" от только что прошедшего, мгновенного же положения. Иначе говоря, в приборе сличения могут вырабатываться коррекционные сигналы, вызванные рассогласованием не только между заданным и текущим значением параметра, но и между положением элемента в текущий момент и его "свежим следом", в "порогово-малых" временных интервалах, порядка 0,07-0,12 сек.
Также как и задающий элемент, прибор сличения имеет уровневую организацию в силу многообразия выполняемых им задач.
Фундаментальную роль в модели Н.А. Бернштейна играет сенсорный синтез. Состав образующих его афферентаций, т.е. прямых и обратных связей, и принцип их объединения служит главным критерием, отличающим один уровень построения движений от другого. Каждая двигательная задача находит себе, в зависимости от содержания и смысловой структуры, тот или иной ведущий уровень. Уровни различаются между собой не только видом сенсорного синтеза, но и анатомическим субстратом, т.е. совокупностью органов нервной системы, без которых функция этого уровня невозможна [18 ].
Первый уровень (А) регуляции движений называется уровнем палеокинетических регуляций. С его помощью осуществляются простейшие, чисто рефлекторные движения. Сенсорным звеном этого рефлекторного кольца служат мышечно-суставные компоненты проприоцепции, замыкающиеся в спинном мозге и в стволе головного мозга.
Второй уровень (В) синергий, т.е. стереотипных движений, в которых участвуют большие группы мышц (например, гимнастические упражнения, улыбка и т.д.), требуют сенсорных коррекций со стороны суставно-пространственных компонентов проприоцепции и контактной экстероцепции.
Для выполнения движений следующего в иерархии уровня (С) пространственного поля необходимы вестибулярная афферентация, осязание, зрение и слух. Это движения, приспособленные к внешнему пространству, такие, как метание мяча или печатание на машинке.
Значительно более сложные движения выполняются на уровне (Д) предметного действия. Основным регулятором движения здесь выступает сам предмет, в соответствии с логикой употребления которого и строится действие. Движения этого уровня представляют собой смысловые акты, решающие определенную задачу. В подобном цепном процессе вырабатываются ведущие и вспомогательные движения. Вариативность здесь выражается в широкой заменяемости одних элементарных операций другими при условии выполнения конечной цели всего акта.
Выше уровня предметного действия лежит уровень (Е) — уровень высших символических координаций, к которому относятся координации письма, речи, музыкальных фраз.
Целенаправленные движения человека являются движениями высших уровней. Низшие уровни играют подчиненную роль, выполняя при этом фоновые координации. В зависимости от цели и смыслового содержания двигательного акта один из уровней берет на себя роль ведущего, который координирует действия нижележащих фоновых уровней. В движении осознается только ведущий уровень. Выработка двигательного навыка — это процесс формирования в ходе обучения и тренировки уровневого состава движения, выделение ведущего уровня и координация между собой всех вовлеченных в управление уровней.
Модель функционирования инструментального действия предложена Н.Д. Гордеевой, В.М. Девишвили и В.П. Зинченко [40). В ней представлены внешние средства деятельности (индикатор и орган управления), анатомо-морфологические органы (рецептор и эффектор), внутренние средства деятельности (перекодирование, формирование программы, реализация, контроль и корррекция). Авторы употребляют термин "блок", под которым понимается не средство выполнения элементарной операции, а сформировавшееся внутреннее или внешнее средство деятельности, включающее в себя наборы определенным образом организованных функций и даже функциональных систем, ответственных за построение образа отображенного пространства, образа движений и его реализации, осуществление сложнейших форм контроля за соответствием реализованного действия его программе и конечному результату. В своем развитом, сформировавшемся виде система блоков функционирует необычайно четко и слаженно. Организующую роль в осуществлении сформированного действия играет двигательная задача.
Задача дальнейшего изложения состоит в то, чтобы показать сложность, пути и методы экспериментальных исследований этой реальности, а затем предложить еще один вариант функциональной модели предметного действия, в которой будут использованы наиболее сильные стороны и объяснительный потенциал моделей, характеристике которых была посвящена настоящая глава.
Литература.
Бернштейн Н. А. Очерки по физиологии движений и физиологии активности. М., «Медицина», 1966.
Бойко Е. И. Время реакции человека. М., «Медицина», 1964.
Шадриков В.Д. Психология деятельности и способности человека. М.,1996.
С.Б. Ребрик. ДВИЖЕНИЯ ГЛАЗ И ПРОЦЕССЫ ОРГАНИЗАЦИИ СЕНСОМОТОРНОГО ДЕЙСТВИЯ [35]
В процессах организации исследуемого сенсомоторного действия выделяется ряд этапов, осуществляемых во временной последовательности: уяснение двигательной задачи в плане восприятия, развертывание моторных программ в пространственные и временные характеристики движения. Каждый из выделенных этапов характеризуется качественно своеобразным способом отражения двигательной задачи, спецификой промежуточного продукта и способа его получения. Слитность и органическая взаимосвязь процессов организации сенсомоторного действия, иерархичность реализующих его структур, взаимная обусловленность каждого из промежуточных этапов организации, образующих между собой Связи порождения, управления, коррелирования, позволяют рассматривать эти процессы как системные.
Глазодвигательная активность представляет собой один из компонентов функциональной системы организации сенсомоторного действия.
В настоящем исследовании анализируются временные и пространственные характеристики афферентирующих скачков глаза на цель, опережающих начало исполнительных движений руки. Согласно ряду работ [20, 95], для процессов организации движения могут быть использованы эффекторные команды, вызывающие скачок глаза на цель. Скачок глаза может нести также функции получения более детальной зрительной информации, используемой для формирования моторных программ движения и для оптимизации обратной связи от результатов выполнения движения [26].
При определении функционального назначения скачков глаз большое значение придается длительности периода от момента появления скачка глаза и до начала движения руки. Если этот период мал или вообще отсутствует (скачок глаза и движение руки начинаются практически одновременно), то информация, полученная в результате скачка, никак не может быть использована при организации моторных команд движения руки, а служит для обеспечения эффективной зрительной обратной связи от конечных этапов выполнения точностного действия. Связь между информацией, полученной в результате скачка глаза, и процессами организации моторных программ движения руки можно допустить лишь тогда, когда этот период больше 100-150 мс. Приводимые исследователями величины этого периода — 30 мс [107], 105 мс [69], 250 мс и 1000 мс [12] - отличаются значительным разбросом и допускают различное толкование функционального назначения скачков. Подобный разброс объясняется, видимо, тем, что эти данные получены в экспериментальных условиях, предъявляющих неравноценные требования к зрительной системе. Как показано в работах Т,М. Буякас [12] и Ю.Б.Гиппенрейтер [20], изменение внешних условий организации движения руки влечет за собой перестройку двигательного поведения глаз. Так, изменение пространственного диапазона места появления цели от 1 до 3 привело к перестройке временных характеристик скачков глаза на цель, опережающих начало движения руки.
Постановка задачи. Цель исследования - определение функциональной связи между процессами организации инструментального действия и сопутствующей им глазодвигательной активностью. Было проведено три серии экспериментов, в которых решались следующие задачи:
1) определение функциональной роли опережающих движения руки скачков глаза на цель в ситуации дискретного отслеживания одиночной цели;
2) анализ особенностей работы глазодвигательной системы в условиях, когда цель внезапно становится невидимой, и исследование влияния этих условий на точность сенсомоторного действия;
3) анализ динамики взаимоотношений между исполнительными движениями руки и глазодвигательной активностью в ситуации "сбоя в действии".
Методика эксперимента. Работа выполнялась на многоцелевом экспериментальном стенде с ЭВМ, позволяющем одновременно регистрировать пространственно—временные характеристики исполнительных движений руки и движений глаз. В состав стенда входили: цветной телевизионный индикатор, манипулятор, посредством которого оператор перемещает по экрану управляемое световое пятно, средства регистрации и анализа. (Более подробно экспериментальный стенд описан в работе [ 9 ]).
В основе методики регистрации движений глаз лежит принцип изменения напряженности электромагнитного поля в зависимости от расстояния между приемником, укрепленным на роговице глаза присоской, и излучателем, находящимся в фронтальной плоскости глаз. Во время опыта голова испытуемого фиксируется специальным приспособлением. Экспериментальный стенд соединен с ЭВМ М—6000, которая используется в активном режиме и режиме счета. В активном режиме ЭВМ по определенной программе высвечивает цели на экране индикатора, меняет их пространственное положение, определяет временные характеристики гашения цели. В режиме счета ЭВМ использовалась во второй серии экспериментов для анализа временных и точностных характеристик действия.
В первой серии экспериментов исследовалась функциональная роль скачков глаза на цель, опережающих движения руки. Перед испытуемыми стояла задача быстрого и точного совмещения управляемого пятна с целью, а затем возвращения управляемого пятна в стартовую позицию. В ряде проб исследовалось влияние на структуру действия инструкции фиксировать взглядом стартовую позицию на всем протяжении выполнения действия. Цели появлялись равновероятно в одной из четырех позиций на горизонтальной оси, справа от старта на расстоянии 10, 20, 30 и 40 см. В первой серии была проведена дополнительная серия, отличающаяся от основной тем, что в ответ на появившуюся на экране индикатора цель испытуемый должен был быстро и точно зафиксировать ее только глазами и после этого, возвратив взгляд в стартовую позицию, ждать следующего предъявления цели, не совершая никаких управляющих воздействий. Дополнительная серия проводилась для сравнения временных характеристик скачков глаз в ситуации ручного и только зрительного отслеживания цели. По ходу опыта на ленте самописца регистрировались управляющие движения руки и движения глаз, временные характеристики которых после окончания опыта подвергались обработке. В эксперименте участвовало трое испытуемых, имеющих навык работы на данном стенде. С каждым из них проведено по 200 проб.
Во второй серии экспериментов цель равновероятно появлялась в одной из семи позиций справа от старта. Использовалось три разных режима предъявления цели при появлении ее в какой-либо позиции: режим А - цель гаснет через 80 мс после появления; режим Б - цель гаснет через 300 мс после появления; режим В - цель появляется и не гаснет до совмещения с ней управляемого пятна. В режиме В испытуемые получали инструкцию быстро и точно совместить управляемое пятно с целью, нажать на кнопку совмещения и затем вернуться в стартовую позицию. В режимах А и Б испытуемые должны были точно совместить управляемое пятно с местоположением исчезнувшей цели. ЭВМ в этой серии обеспечивала равновероятное высвечивание цели в одной из семи позиций (справа от старта с шагом 10 см) и чередование в случайном порядке трех режимов гашения цели, а также использовалась для анализа точности действия, дифференцированно для каждой из семи позиций возможных местоположений цели и для трех режимов ее гашения. В момент нажатия на кнопку, что означало окончание совмещения, автоматически регистрировалась и хранилась в памяти ЭВМ алгебраическая ошибка совмещения. После окончания опыта ЭВМ по программе рассчитывала усредненную ошибку и ее среднее квадратическое отклонение. На ленте самописца регистрировались движения глаз и руки. В эксперименте участвовали пять испытуемых, с каждым из которых проведено по 480 проб.
В третьей серии экспериментов, названной “сбоем в действии”[68], перед испытуемыми стояла задача быстро и точно совместить управляемое пятно с целью, появившейся справа от старта. В случае появления через период ¶t второй цели, слева от старта, испытуемые должны были игнорировать первую цель и совмещать пятно со второй целью. Период ¶t варьировался в случайном порядке по программе ЭВМ и принимал три фиксированных значения: 100, 200 и 300 мс. В опытах участвовали четверо испытуемых.
Анализ результатов первой серии экспериментов. В ситуации ручного слежения за целью в латентный период движения руки зарегистрированы скачки глаза на цель и фиксация ее до момента окончания действия.
Информативными показателями для анализа временной последовательности скачков глаза и движений руки являлись следующие параметры: Тлг — латентное время скачка глаза на цель, мс; Тлр — латентное время начала движения руки, мс; ¶t – время от начала, скачка глаза и до начала движения руки, мс.
Способ получения указанных параметров представлен на рис. 1. Усредненные результаты обработки указанных параметров для трех испытуемых, а также их среднее квадратическое отклонение представлены в таблице.
Скачок глаза совершается со средним латентным периодом 240 мс и опережает движение руки в среднем на 100 мс. Следует отметить одинаковое среднее квадратическое отклонение параметров Тлг (sТлг) и Тлр (sТлр) — порядка 60 мс.
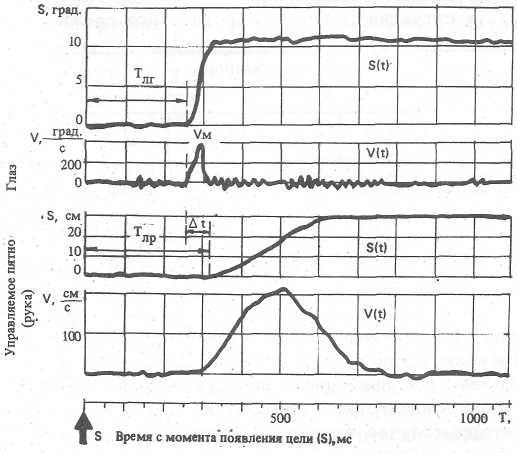
Рис. 1. Анализируемые зависимости и способ обработки.
Временные характеристики движений глаз (мс) в ситуации ручного и зрительного слежения
| Испытуемые | Ручное слежение | Зрительное слежение | ||||||
| Тлг | sТлг | Тлр | sТлр | ¶t | Тлг | sТлг | ||
На рис. 2 представлены для сравнения зависимости S(t) и V(t) выполнения действия по совмещению управляемого пятна с целью в условиях, когда работа глазодвигательной системы полностью определяется задачами, связанными с организацией движения руки к цели, а также в условиях, когда испытуемым дана дополнительная инструкция — во время совмещения с целью фиксировать стартовую позицию. Как видно из рис. 2, во втором случае скоростные характеристики действия снижены и фаза контроля и коррекции растянута во времени [24].
Данные таблицы свидетельствуют о незначительном увеличении Тлг в ситуации ручного слежения по сравнению с ситуацией только зрительного слежения. Средняя длительность скачка глаз у всех испытуемых обнаруживает зависимость от амплитуды скачка и колеблется от 40 до 70 мс. Максимальная скорость скачков VM с амплитудой в 3,7 и 15° составляет соответственно 210 и 400 град/с.

Рис. 2. Влияние инструкции фиксации старта на длительность стадии контроля и коррекции. Л, Ф, К - латентная, фазическая стадии и стадия контроля и коррекции [24].
Обсуждение результатов первой серии экспериментов. Зарегистрированные скачки глаза на цель, опережающие в среднем на 100 мс начало движения руки, представляют собой типичную для всех испытуемых глазодвигательную активность, сопровождающую выполнение данного действия (см. рис.1). Можно предположить, что скачки глаза служат для настройки глазодвигательной системы с целью оптимизации зрительной обратной связи от конечных этапов совершения действия. Скачок глаза переводит область fovea из стартовой позиции на цель, в зоне которой и осуществляются коррекции исполнительных движений и контроль за точностью выполнения действия. Характерно, что в пробах, где испытуемым давалась инструкция фиксировать старт глазами на всем протяжении выполнения действия, стадия контроля и коррекции растянута во времени (см. рис.2). В условиях фиксации взгляда на стартовой позиции зрительный контроль за этой стадией исполнительного движения затруднен, поскольку периферическое зрение обладает меньшей остротой, чем фовеальное. А для процессов контроля и коррекции как раз и требуется точное различение пространственного положения управляемого пятна и цели. Фиксация старта затрудняет выполнение этой заключительной фазы действия, для регуляции которой активно используется текущая зрительная обратная связь.
Скачок глаза на цель, совершаемый в латентный период организации движения руки, может также служить для выделения пространственных характеристик цели, когда периферическим зрением это сделать трудно (например, в условиях зашумленности поля зрения избыточной информацией или при необходимости определения признаков глубины).
Использование поступившей в результате скачка глаза на цель зрительной информации для формирования моторных программ исполнительных движений руки можно обсуждать лишь тогда, когда эти скачки предшествуют началу движения руки на период, превышающий 200 мс. Как показано в работе [102], это минимальное время, необходимое для перевода какого—либо информационного содержания, имеющего зрительный характер, в исполнительные движения руки. В наших опытах средняя величина периода ¶t равна 100 мс (см. таблицу), а в отдельных пробах этот период практически отсутствует, т.е. движение руки к цели и скачок глаза на цель начинаются одновременно. В работе Мегоу и Армстронга [107], исследовавших временные характеристики движений глаз и руки в ситуации дискретного отслеживания цели, приводятся еще более низкие средние значения периода ¶t – 30 мс. Мы предполагаем, что выделение пространственных характеристик цели, используемых для формирования моторных программ исполнительных движений руки к цели, в условиях нашего эксперимента осуществляется посредством периферического зрения. Параллельно с процессами организации движения руки происходит организация переноса взгляда на цель, что необходимо для оптимизации зрительной обратной связи от заключительных фаз движения.
Таким образом, в латентный период совершения действия параллельно происходят процессы организации двух движений — руки и глаз, — занимающих разное место в структуре действия. Возникает интересная проблема исследования взаимодействия и взаимовлияния этих двух процессов. В связи с этим проведен сравнительный анализ средних латентных периодов движений глаз в ситуациях зрительного и ручного слежения за целью. Движения глаз, имея одинаковые в обеих ситуациях, пространственно-временные характеристики, занимают разное место в структуре действия. В случае зрительного слежения скачки глаза на цель являются исполнительными действиями, обеспечивающими реализацию задачи, в ситуации ручного слежения за целью скачки глаз входят в операциональный состав сенсомоторного действия. Как показал анализ, средние латентные периоды скачков глаз на цель в этих двух режимах имеют один порядок (см. таблицу). Наблюдаемое незначительное (на 10-20 мс) удлинение Тлг в ситуации ручного слежения при sТлг – 60 мс является незначимым. Эти данные позволяют заключить, что процессы, связанные с организацией движений руки и движений глаз в ситуации ручного отслеживания цели, протекают параллельно и не оказывают влияния друг на друга.
Анализ результатов второй серии экспериментов. В этой серии использовались три разных режима гашения цели, чередуемых в случайном порядке. По ходу эксперимента регистрировались и хранились в памяти ЭВМ следующие параметры:
¶ - алгебраическая ошибка, допускаемая при совмещении управляемого пятна с местоположением цели, мм;
Тф+к - время исполнительной фазы действия, мс.
После эксперимента рассчитывались средние значения указанных параметров (¶, Тф+к), а также их среднее квадратическое отклонение (s¶, sТф+к). Для оценки точностных характеристик действия был выбран показатель s¶. Усредненный для пяти испытуемых характер зависимости параметра s¶ от местоположения цели и от режима ее гашения представлен на рис. 3, который наглядно демонстрирует, что точность совмещения для режимов А, Б, В различна. Для режима В характерны самые низкие значения показателя, s¶ (2,2 мм) и независимость этих значений от амплитуды движения. В режиме А, когда цель гасилась через 80 мс после предъявления, значения s¶ наибольшие и обнаруживают зависимость от амплитуды исполнительного движения. Режим Б занимает промежуточное значение по величине параметра s¶. Практически у всех испытуемых значения параметра Тф+к в режиме А оказываются меньше, чем в режиме В. Эти различия у некоторых испытуемых достигают 200 мс.

Рис. 3. Точность действия при различных режимах гашения цели:
А - через 80 мс; Б - через 300 мс; В - без гашения
Представленные на рис. 4 параметрические зависимости движений глаз и руки дают представление о характере взаимодействия между исполнительными движениями руки и сопутствующей им глазодвигательной активности в режимах гашения цели А и В. Как видно из рис. 4а, ошибка, возникшая при совмещении управляемого пятна с местоположением исчезнувшей цели, связана с ошибкой, допущенной глазом при попытке зафиксировать то место, где была цель.

Рис. 4. Взаимодействие исполнительных движений руки и афферентирующих движений глаз
Ошибки, допускаемые глазодвигательной системой, встречаются двух типов. Первый тип ошибок — характерный для условий, когда цель гасится через 80 мс после появления - вызван тем, что скачок совершается не точно на местоположение исчезнувшей цели (см. рис. 4,а). Второй тип ошибок представляет собой случаи, когда глаз первоначально правильно фиксирует местоположение исчезнувшей цели, но в условиях безориентирного, пустого поля непроизвольно сменяет точку фиксации (см. рис. 4,6). После появления цели глаз и рука исправляют допущенные ошибки.
Обсуждение результатов второй серии экспериментов. Полученные результаты свидетельствуют о том, что режимы предъявления целей А, Б, В по-разному сказываются на точности действия (см. рис. 3). Возможное объяснение указанных различий лежит в особенностях взаимодействия процессов организации действия с глазодвигательной активностью, сопутствующей его выполнению.
В ситуации ручного дискретного отслеживания цели в латентный период действия зарегистрированы скачки глаза на цель, происходящие в среднем через 240 мс после ее появления и опережающие начало движения руки в среднем на 100 мс. Временные характеристики момента гашения цели выбирались таким образом, чтобы в режиме А, цель гасла до начала скачка глаза к цели, а в режиме Б - уже после того, как глаз ее зафиксировал. При предъявлении цели в режимах А и Б, когда цель вскоре после появления гасла, скачок глаза, наряду с функцией обеспечения оптимальной зрительной обратной связи, служит для фиксации того места, где была цель. При совершении действия в этих условиях происходит как бы сведение зрительной оси, направленной в место, где была цель, с управляеммой рабочей точкой. Точностные характеристики действия при этом в значительной мере определяются тем, насколько точно зрительная система фиксирует местоположение исчезнувшей цели.
Как уже указывалось, ошибки в фиксации местоположения исчезнувшей цели возникают по двум причинам. Первая из них связана с тем, что гашение цели до начала скачка глаза к ней сказывается на его точности (см. рис. 4, а). Вторая — состоит в том, что глазодвигательная система не способна точно зафиксировать взгляд в безориентирном, пустом поле (см. рис. 4, б). Для режима Б, в котором цель гасится уже после того, как глаз ее точно зафиксировал, характерны ошибки, вызванные второй причиной. В режиме А глазодвигательной системой допускаются ошибки в силу двух вышеуказанных причин, поэтому точностные характеристики здесь хуже, чем в режиме Б (см. рис. 3).
Из полученных результатов можно сделать косвенный вывод о том, что в регуляции движений глаз присутствует компонент замкнутого контура регулирования. Этот вывод согласуется с выводами, полученными в работе [7], о том, что механизм регуляции движений глаз неоднороден и что в нем выделяются два уровня: грубой регуляции — посредством моторных программ и тонкой регуляции, осуществляемой по ходу совершения скачка глаза, с учетом непрерывно поступающей зрительной стимуляции. Гашение цели до начала скачка глаза не позволяет осуществлять тонкие регуляции, придающие скачку требуемую точность.
Для точной фиксации местоположения исчезнувшей цели можно рекомендовать наносить на экране индикатора координатную сетку, элементы которой могут служить опорными точками, позволяющими более точно контролировать ее местоположение.
Анализ и обсуждение результатов третьей серии экспериментов. Результаты третьей серии, в отличие от результатов двух предыдущих, не имеют строго выраженной количественной оценки. Задача исследования состояла в выявлении типов связей между регулирующими и исполнительными компонентами простого сенсомоторного действия в условиях дискретного отслеживания одиночной цели и в условиях последовательного появления двух целей с разным временем задержки (¶t) предъявления второй относительно первой.
В пробах с предъявлением одной цели выявлена довольно стабильная временная последовательность взаимодействия движений глаз и исполнительных движений руки. Скачки глаз со стартовой позиции на цель, опережающие в среднем на 100 мс движения руки, афферентируют движения руки к цели, способствуя более четкому и точному выполнению действия (рис. 5,а). В стабильных условиях предъявления целей в некоторых пробах наблюдается появление антиципирующих скачков к месту их возможного появления (рис. 5,6). В этих пробах после высвечивания цели и до начала движения к ней руки зарегистрированы лишь малоамплитудные скачки или дрейф, подводящие глаз к нужной позиции. Зарегистрированы также пробы, в которых антиципация в когнитивной сфере имеет выход в исполнительные стадии. В этих пробах еще до момента появления цели начинается движение к месту ее возможного появления. Психические процессы, связанные с организацией сенсомоторного действия, могут начинаться не только с физического воздействия на рецепторные органы чувств, они могут быть инициированы одной лишь внутренней психической активностью субъекта. В ряде случаев антиципация может служить причиной преждевременных, ошибочных реакций [117].
Ситуация "сбой в действии" служила средством актуализации потенциально возможных связей между когнитивными и исполнительными компонентами действия. В условиях последовательного предъявления двух целей выявлена зависимость между характером глазодвигательного поведения и временем задержки ¶t появления второй цели. При минимальной величине задержки, равной 50 мс, перестройка действия происходит в регулирующем звене, почти не затрагивая исполнительное звено. Программа скачка глаз перестраивалась сразу в сторону второй цели. Первый сигнал игнорировался, но при этом латентное время движений глаз возрастало, становясь равным 300 мс. Движению руки в сторону второй цели в большинстве случаев предшествовало незначительное перемещение в сторону первой цели (рис. 5, в). Под влиянием второй цели, предъявляемой с задержкой в 50 мс, наблюдаются и другие типы взаимодействия между движениями глаз и исполнительными движениями руки, представленные на рис. 5, г, д. По-видимому, характер движений глаз определяется успешностью выполнения промежуточных этапов организации действия. Имеется как бы петля обратной связи от текущих процессов организации действия, которая определяет характер глазодвигательной активности.
Анализ результатов показал, что при величине задержки, превышающей 50 мс, всегда наблюдается движение как глаз, так и руки в сторону первого сигнала. При этом, чем меньше интервал между первым и вторым сигналами, тем меньше путь, который проходит рука в направлении первой цели. Глаз совершает скачок в сторону второго сигнала на 70—100 мс раньше, чем изменяется маршрут движения руки (рис. 5,е). Обычно глаз не достигает сразу второго сигнала, а делает короткие промежуточные фиксации на пути между первой и второй целями, ожидая подведения к ним управляемого пятна. Количество промежуточных фиксаций тем больше, чем больше время задержки между появлением первой и второй цели. Иначе говоря, в этой ситуации зрительная система работает в режиме непрерывного регулирования движений руки.
Результаты свидетельствуют о том, что проблема открытого и закрытого контура регулирования должна обсуждаться, главным образом, по отношению к целостной функциональной структуре сенсомоторного действия, а не только по отношению к ее отдельным компонентам.
Анализ типов отношений между регулирующим и исполнительным звеньями показал также, что при выполнении даже простых инструментальных сенсомоторных актов их функциональная структура реализуется с преобладанием закрытого контура и регуляция основных компонентов этой структуры осуществляется через среду. Система в целом работает таким образом, что ее автономное функционирование — без учета изменений, происходящих в среде — сведено к минимуму. Даже в тех случаях, когда движение осуществляется по открытому контуру зрительная система учитывает изменения, происходящие в окружении и перепрограммирует операциональный состав действия. Другими словами, функциональная структура сенсомоторного действия функционирует в соответствии со смешанным принципом регулирования, при преобладающей роли закрытого контура.

Рис. 5. Взаимодействие движений глаз и руки в ситуации дискретного отслеживания цели
Выводы. Глазодвигательная активность представляет собой один из компонентов функциональной структуры сенсомоторного действия, которая в своих внешне выраженных проявлениях может рассматриваться как цепь последовательно осуществляемых операций: а) обнаружение цели; б) скачок глаза на цель; в) баллистическое перемещение руки в сторону цели; г) контроль и коррекция. Как показано в работе, скачки глаза со стартовой позиции на цель, опережающие на 50-100 мс движения руки, функционально служат для оптимизаций зрительной обратной связи от заключительных этапов действия. Движения глаз, обеспечивая оптимальные условия поступления необходимой зрительной информации, соотносимы с операциональным составом действия и определяются условиями его осуществления.
Анализ глазодвигательной активности, легко регулируемой в ее внешне выраженных проявлениях, дал дополнительные сведения об особенностях строения операционального состава действия. Исследуя пространственно—временную структуру этих движений, можно косвенно судить о том, на каких этапах организации и какого рода зрительная информация необходима для выполнения функции регуляции сенсомоторного действия. Нас интересовали отношения (типы связи) между регулятором и регулируемым объектом, а также вопрос, являются ли они стандартными, жестко детерминированными или в этих отношениях имеется определенная, динамика. Экспериментально выявлена определенная динамика взаимоотношений глазодвигательных и мануальных действий, определяемая характером и условиями осуществления двигательной задачи. Наиболее показательным в этом плане является поведение глазодвигательной системы в ситуации "сбоя в действии". При реализации одной и той же двигательной задачи зарегистрировано три разных типа взаимодействия между глазодвигательной активностью и исполнительными движениями руки (см. рис. 5, в, г, д). По-видимому, характер глазодвигательной активности заранее жестко не задан, а определяется актуальными запросами от промежуточных этапов организации действия. Автономное функционирование когнитивных и исполнительных компонентов действия - без учета изменений, происходящих в процессе организации этого действия - минимально.
Дата добавления: 2015-08-21; просмотров: 141 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Роль обратных связей в управлении движениями | | | КРАТКАЯ АННОТАЦИЯ |